基于机械臂的相机标定方法
本发明涉及一种基于机械臂的相机标定方法,属于视觉定位。
背景技术:
1、相机标定是图像测量过程以及计算机视觉应用中必不可少的前置环节,通过测量和计算世界中3d点和相机图像中2d点的关系,建立相机成像几何模型,其标定结果的精度及算法的稳定性直接影响相机工作产生结果的准确性。
2、现有的相机标定方法包括:用相机拍摄多组不同位姿下的黑白棋盘格的图像,通过图像中黑白棋盘格的角点,建立包含相机内部参数的超定方程组,并对结果进行非线性优化给出最优解,进而得到相机的内参。
3、上述方案中需要拍摄多组不同位姿的图像进而进行计算,标定准确度依赖于不同角度的图像输入,多次标定的结果可能不同,准确度较差。
技术实现思路
1、本发明的目的在于提供一种基于机械臂的相机标定方法,用于解决现有技术中存在的问题。
2、为达到上述目的,本发明提供如下技术方案:
3、根据第一方面,本发明实施例提供了一种基于机械臂的相机标定方法,用于标定系统中,所述标定系统包括:机械臂、机械夹爪、相机和标定物,所述机械夹爪固定在所述机械臂的末端,所述机械夹爪固定所述相机,所述相机的取景框朝向所述标定物,所述方法包括:
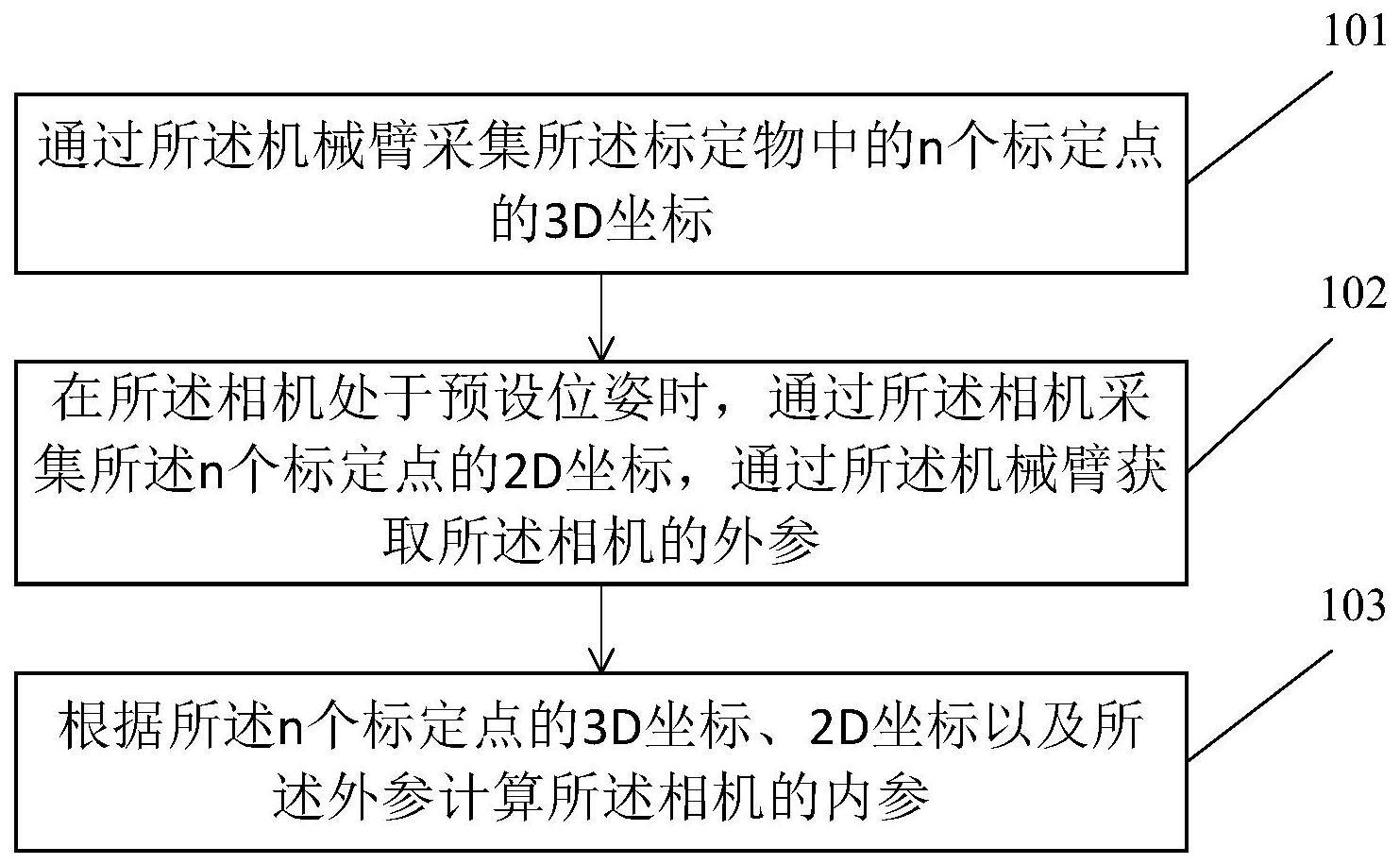
4、通过所述机械臂采集所述标定物中的n个标定点的3d坐标,n为大于等于3的整数;
5、在所述相机处于预设位姿时,通过所述相机采集所述n个标定点的2d坐标,通过所述机械臂获取所述相机的外参;
6、根据所述n个标定点的3d坐标、2d坐标以及所述外参计算所述相机的内参。
7、可选地,所述根据所述n个标定点的3d坐标、2d坐标以及所述外参计算所述相机的内参,包括:
8、根据所述相机的外参将所述n个标定点的3d坐标从世界坐标系转换为相机坐标系;
9、根据所述n个标定点在相机坐标系下的3d坐标、所述n个标定点的2d坐标以及相机小孔成像模型,计算得到所述相机的内参。
10、可选地,所述根据所述相机的外参将所述n个标定点的3d坐标从世界坐标系转换为相机坐标系,包括:
11、对于所述n个标定点中的每个标定点,若所述标定点在世界坐标系下的坐标为(xw,yw,zw),转换后的相机坐标系下的坐标(xc,yc,zc)为:
12、
13、其中,r和t为所述相机的外参。
14、可选地,所述根据所述n个标定点在相机坐标系下的3d坐标、所述n个标定点的2d坐标以及相机小孔成像模型,计算得到所述相机的内参,包括:
15、若所述相机的内参为:(fx,fy,u0,v0);则:
16、根据所述n个标定点在所述相机坐标系下的3d坐标、所述n个标定点的2d坐标以及所述相机小孔成像模型,计算fx,fy以及u0+v0;
17、根据所述fx、所述fy、所述u0+v0以及所述n个标定点的2d坐标,计算所述u0和所述v0。
18、可选地,若n=3,所述根据所述n个标定点在所述相机坐标系下的3d坐标以及所述n个标定点的2d坐标,计算fx,fy以及u0+v0,包括:
19、所述n个标定点在所述相机坐标系下的3d坐标为:a(x1,y1,z1),b(x2,y2,z2),c(x3,y3,z3),所述n个标定点中的每个标定点的2d坐标为:a(u1,v1),b(u2,v2),c(u3,v3);
20、
21、其中,γ1=u1+vl,γ2=u2+v2,γ3=u3+v3。
22、可选地,所述根据所述fx、所述fy、所述u0+v0以及所述n个标定点的2d坐标,计算所述u0和所述v0,包括:
23、
24、可选地,若所述预设位姿包括至少两个,所述方法还包括:
25、将至少两个预设位姿下计算得到的所述相机的内参的均值作为所述相机的最终内参。
26、第二方面,提供了一种基于机械臂的相机标定装置,所述装置包括存储器和处理器,所述存储器中存储有至少一条程序指令,所述处理器通过加载并执行所述至少一条程序指令以实现如第一方面所述的方法。
27、第三方面,提供了一种计算机存储介质,所述计算机存储介质中存储有至少一条程序指令,所述至少一条程序指令被处理器加载并执行以实现如第一方面所述的方法。
28、通过所述机械臂采集所述标定物中的n个标定点的3d坐标,n为大于等于3的整数;在所述相机处于预设位姿时,通过所述相机采集所述n个标定点的2d坐标,通过所述机械臂获取所述相机的外参;根据所述n个标定点的3d坐标、2d坐标以及所述外参计算所述相机的内参。解决了现有技术中标定结果存在误差的问题,达到了对单个标定物采集n组3d坐标和2d坐标进而计算得到相机内参,计算过程简洁明了无需复杂计算,提高标定精度的效果。
29、上述说明仅是本发明技术方案的概述,为了能够更清楚了解本发明的技术手段,并可依照说明书的内容予以实施,以下以本发明的较佳实施例并配合附图详细说明如后。
技术特征:
1.一种基于机械臂的相机标定方法,其特征在于,用于标定系统中,所述标定系统包括:机械臂、机械夹爪、相机和标定物,所述机械夹爪固定在所述机械臂的末端,所述机械夹爪固定所述相机,所述相机的取景框朝向所述标定物,所述方法包括:
2.根据权利要求1所述的方法,其特征在于,所述根据所述n个标定点的3d坐标、2d坐标以及所述外参计算所述相机的内参,包括:
3.根据权利要求2所述的方法,其特征在于,所述根据所述相机的外参将所述n个标定点的3d坐标从世界坐标系转换为相机坐标系,包括:
4.根据权利要求2所述的方法,其特征在于,所述根据所述n个标定点在相机坐标系下的3d坐标、所述n个标定点的2d坐标以及相机小孔成像模型,计算得到所述相机的内参,包括:
5.根据权利要求4所述的方法,其特征在于,若n=3,所述根据所述n个标定点在所述相机坐标系下的3d坐标以及所述n个标定点的2d坐标,计算fx,fy以及u0+v0,包括:
6.根据权利要求4所述的方法,其特征在于,所述根据所述fx、所述fy、所述u0+v0以及所述n个标定点的2d坐标,计算所述u0和所述v0,包括:
7.根据权利要求1至6任一所述的方法,其特征在于,若所述预设位姿包括至少两个,所述方法还包括:
8.一种基于机械臂的相机标定装置,其特征在于,所述装置包括存储器和处理器,所述存储器中存储有至少一条程序指令,所述处理器通过加载并执行所述至少一条程序指令以实现如权利要求1至7任一所述的方法。
9.一种计算机存储介质,其特征在于,所述计算机存储介质中存储有至少一条程序指令,所述至少一条程序指令被处理器加载并执行以实现如权利要求1至7任一所述的方法。
技术总结
本申请公开了一种基于机械臂的相机标定方法,涉及视觉定位技术领域,用于标定系统中,所述标定系统包括:机械臂、机械夹爪、相机和标定物,所述机械夹爪固定在所述机械臂的末端,所述机械夹爪固定所述相机,所述相机的取景框朝向所述标定物,所述方法包括:通过机械臂采集标定物中的n个标定点的3D坐标;在相机处于预设位姿时,通过相机采集n个标定点的2D坐标,通过机械臂获取相机的外参;根据n个标定点的3D坐标、2D坐标以及外参计算相机的内参。解决了现有技术中标定结果存在误差的问题,达到了对单个标定物采集n组3D坐标和2D坐标进而计算得到相机内参,计算过程简洁明了无需复杂计算,提高标定精度的效果。
技术研发人员:闫野,陈伟,赵少华,印二威,谢良,施忠臣,张敬,张亚坤,张皓洋
受保护的技术使用者:中国人民解放军军事科学院国防科技创新研究院
技术研发日:
技术公布日:2024/1/15
- 还没有人留言评论。精彩留言会获得点赞!