一种目标物追踪方法、装置、计算机设备和存储介质与流程
本申请涉及智能驾驶,特别是涉及一种目标物追踪方法、装置、计算机设备、存储介质和计算机程序产品。
背景技术:
1、随着智能驾驶技术的发展,出现了感知技术,主要用于检测行人、车辆等动态障碍物,并将这些动态障碍物作为目标进行追踪。目标追踪通常需要对连续帧中检测到的障碍物进行关联匹配,从而实现在智能驾驶过程中对多类型障碍物实时准确的追踪。
2、传统技术中,通常使用激光雷达对动态障碍物进行探测。然而,激光雷达受环境因素影响较大,在恶劣天气条件下依靠点云数据进行探测会存在一些误检以及漏检的情况,因此在此情况下容易影响到实时跟踪的效果。
技术实现思路
1、基于此,有必要针对上述技术问题,提供一种能够在在不利于激光雷达探测的场景下,提高实时追踪的准确度的目标物追踪方法、装置、计算机设备、计算机可读存储介质和计算机程序产品,以减少多目标匹配中的误匹配与漏检,提高目标物追踪效率。
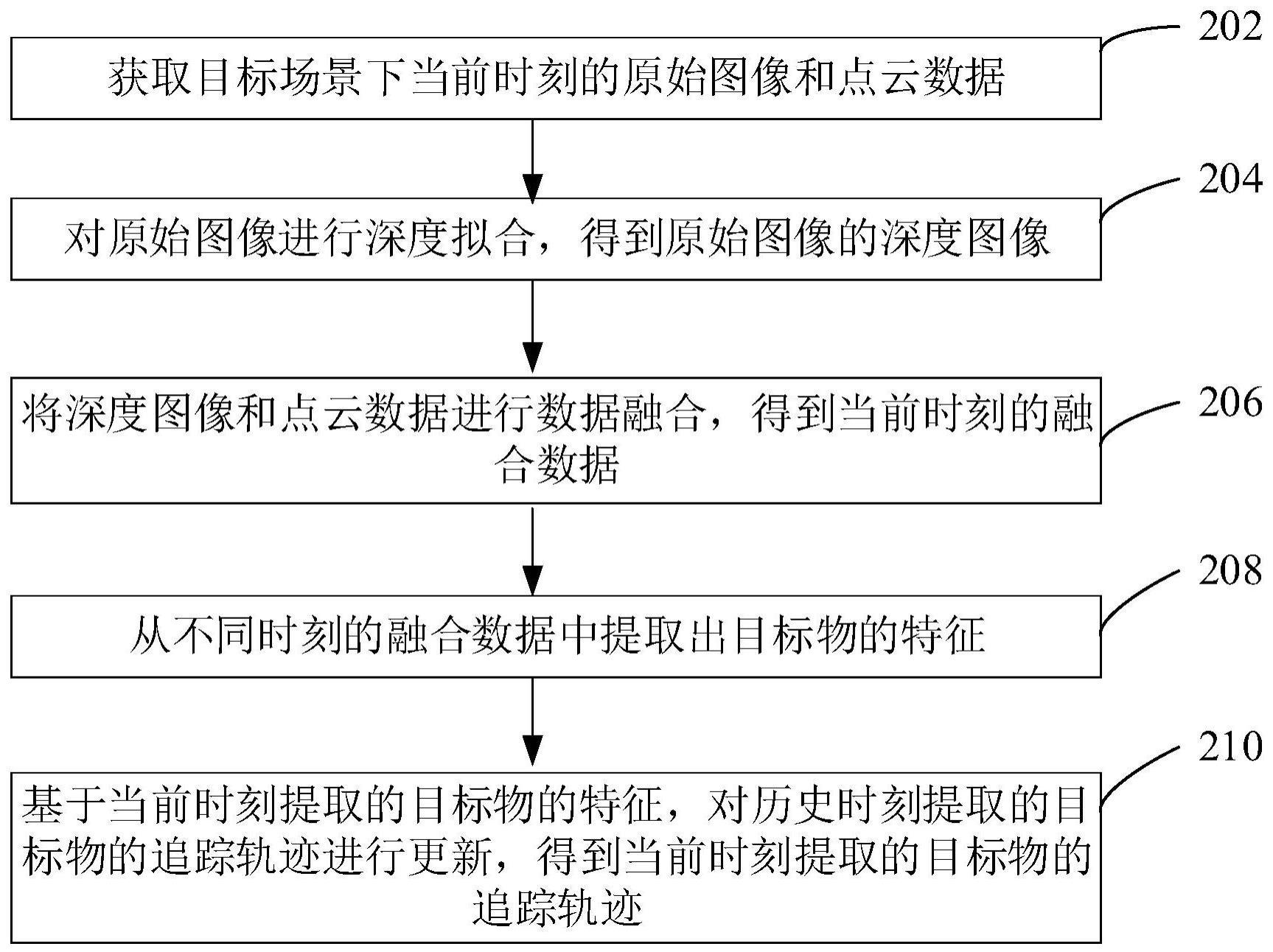
2、第一方面,本申请提供了一种目标物追踪方法。所述方法包括:获取目标场景下当前时刻的原始图像和点云数据;
3、对所述原始图像进行深度拟合,得到所述原始图像的深度图像;
4、将所述深度图像和所述点云数据进行数据融合,得到当前时刻的融合数据;
5、从当前时刻的融合数据中提取出目标物的特征;
6、基于当前时刻提取的目标物的特征,对历史时刻提取的目标物的追踪轨迹进行更新,得到当前时刻提取的目标物的追踪轨迹。
7、在其中一个实施例中,将所述深度图像和所述点云数据进行数据融合,包括:
8、从所述原始图像中提取各像素点的纹理信息;
9、基于所述纹理信息,对所述深度图像进行处理;
10、将处理后的深度图像和所述点云数据进行数据融合。
11、在其中一个实施例中,所述将所述深度图像和所述点云数据进行数据融合,得到当前时刻的融合数据,包括:
12、将所述点云数据从激光雷达坐标系映射到所述原始图像对应的相机坐标系中,得到映射点云数据;
13、确定所述映射点云数据中的各映射激光点在所述深度图像中的对应像素点;
14、确定各映射激光点的法向量与对应像素点的法向量之间的夹角;
15、保留所述夹角在预设阈值范围内的映射激光点;
16、将所述深度图像和保留的映射激光点进行数据融合,得到当前时刻的融合数据。
17、在其中一个实施例中,所述从当前时刻的融合数据中提取出目标物的特征,包括:
18、基于当前时刻的融合数据,识别出一个或多个目标对应的目标区域;
19、根据当前时刻保留的各映射激光点的属性数据,以及保留的各映射激光点与所述目标区域的相对位置关系,为当前时刻保留的各映射激光点分配相应的权值;
20、根据所述权值,从当前时刻的融合数据中提取出目标物的特征。
21、在其中一个实施例中,所述从当前时刻的融合数据中提取出目标物的特征,包括:
22、确定当前时刻保留的各映射激光点在映射前后的视差;
23、根据所述视差确定保留的映射激光点与所述深度图像之间的融合置信度;
24、结合所述融合置信度,从当前时刻的融合数据中提取出目标物的特征。
25、在其中一个实施例中,所述基于当前时刻提取的目标物的特征,和历史时刻提取的目标物的追踪轨迹,进行当前时刻的目标物追踪,包括:
26、根据历史时刻提取的目标物的追踪轨迹,预测所述目标物在当前时刻的位置;
27、根据当前时刻提取的目标物的特征,检测当前时刻目标物的位置;
28、构造当前时刻检测到的目标物的位置和预测的所述目标物的位置之间的代价矩阵模型;
29、对所述代价矩阵模型进行求解,确定当前时刻检测到的目标物与历史时刻提取的目标物的追踪轨迹之间的匹配度;
30、根据所述匹配度,对历史时刻提取的目标物的追踪轨迹进行更新,得到当前时刻的提取的目标物的追踪轨迹。
31、在其中一个实施例中,所述根据所述匹配度,对历史时刻提取的目标物的追踪轨迹进行更新,包括:
32、如果当前时刻检测到的目标物与历史时刻提取的目标物的追踪轨迹的最大匹配度大于预设第一阈值,则基于当前时刻检测到的目标物的位置更新所述最大匹配度对应的追踪轨迹;
33、如果当前时刻检测到的目标物与历史时刻提取的所述目标物的追踪轨迹的最大匹配度小于预设第二阈值,则根据所述目标物的特征建立新追踪轨迹;
34、如果历史时刻提取的目标物的追踪轨迹与当前时刻检测到的目标物的最大匹配度小于预设第三阈值,则删除历史时刻提取的目标物的追踪轨迹;
35、其中,所述预设第一阈值大于所述第二阈值和所述第三阈值。
36、第二方面,本申请还提供了一种目标物追踪装置。所述装置包括:
37、数据获取模块,用于获取目标场景下当前时刻的原始图像和点云数据;
38、深度拟合模块,用于对所述原始图像进行深度拟合,得到所述原始图像的深度图像;
39、数据融合模块,用于将所述深度图像和所述点云数据进行数据融合,得到当前时刻的融合数据;
40、特征提取模块,用于从当前时刻的融合数据中提取出目标物的特征;
41、实时追踪模块,用于基于当前时刻提取的目标物的特征,对历史时刻提取的目标物的追踪轨迹进行更新,得到当前时刻提取的目标物的追踪轨迹。
42、第三方面,本申请还提供了一种计算机设备。所述计算机设备包括存储器和处理器,存储器存储有计算机程序,处理器执行计算机程序时实现第一方面所述的方法。
43、第四方面,本申请还提供了一种计算机可读存储介质。所述计算机可读存储介质,其上存储有计算机程序,计算机程序被处理器执行时实现第一方面所述的方法。
44、第五方面,本申请还提供了一种计算机程序产品。所述计算机程序产品,包括计算机程序,该计算机程序被处理器执行时实现第一方面所述的方法。
45、上述目标物追踪方法、装置、计算机设备、存储介质和计算机程序产品,通过对场景内当前时刻的原始图像进行深度拟合,得到对应的能反映目标物三维信息的深度图像,并通过将深度图像与当前时刻的点云数据进行融合,可以对在不利于激光雷达探测的场景下(如恶劣天气条件下)所采集的点云数据进行补充和修正,从而能够更好地提取三维目标的特征信息,提高目标物识别和追踪的准确度,减少在不利于激光雷达探测的场景下因激光雷达难以达到正常的工作状态,而导致多目标物匹配过程中的误匹配与漏检事件的发生,以提高目标物追踪效率。
技术特征:
1.一种目标物追踪方法,其特征在于,所述方法包括:
2.根据权利要求1所述的方法,其特征在于,将所述深度图像和所述点云数据进行数据融合,包括:
3.根据权利要求1所述的方法,其特征在于,所述将所述深度图像和所述点云数据进行数据融合,得到当前时刻的融合数据,包括:
4.根据权利要求3所述的方法,其特征在于,所述从当前时刻的融合数据中提取出目标物的特征,包括:
5.根据权利要求3所述的方法,其特征在于,所述从当前时刻的融合数据中提取出目标物的特征,包括:
6.根据权利要求1-5中任一项所述的方法,其特征在于,所述基于当前时刻提取的目标物的特征,和历史时刻提取的目标物的追踪轨迹,进行当前时刻的目标物追踪,包括:
7.根据权利要求6所述的方法,其特征在于,所述根据所述匹配度,对历史时刻提取的目标物的追踪轨迹进行更新,包括:
8.一种目标物追踪装置,其特征在于,所述装置包括:
9.一种计算机设备,包括存储器和处理器,所述存储器存储有计算机程序,其特征在于,所述处理器执行所述计算机程序时实现权利要求1至7中任一项所述的方法的步骤。
10.一种计算机可读存储介质,其上存储有计算机程序,其特征在于,所述计算机程序被处理器执行时实现权利要求1至7中任一项所述的方法的步骤。
技术总结
本申请涉及一种目标物追踪方法、装置、计算机设备、存储介质和计算机程序产品。方法包括:获取目标场景下当前时刻的原始图像和点云数据;对所述原始图像进行深度拟合,得到所述原始图像的深度图像;将所述深度图像和所述点云数据进行数据融合,得到当前时刻的融合数据;从当前时刻的融合数据中提取出目标物的特征;基于当前时刻提取的目标物的特征,对历史时刻提取的目标物的追踪轨迹进行更新,得到当前时刻提取的目标物的追踪轨迹。采用本方法能够在不利于激光雷达探测的场景下更好地提取出三维目标的特征信息,提高关联匹配的准确度,减少由于激光雷达难以达到正常的工作状态而导致的多目标匹配中的误匹配与漏检,提高目标物追踪效率。
技术研发人员:张振林,卫玉蓉,陈胤子
受保护的技术使用者:中汽创智科技有限公司
技术研发日:
技术公布日:2024/1/15
- 还没有人留言评论。精彩留言会获得点赞!