一种图像匹配方法、设备及存储介质与流程
本发明涉及一种图像匹配方法、设备及存储介质,属于图像处理。
背景技术:
1、图像匹配是指通过一定的匹配算法寻找在同一场景下多幅图像的重叠部分,然后经过变换、融合,组成一幅场景图片。图像匹配技术在视觉slam、目标识别、目标跟踪、三维重建、视频监控以及机器视觉等领域都得到了广泛的应用。目前图像匹配方法主要分为三类:基于灰度信息的匹配方法、基于变换域的匹配方法和基于特征的匹配方法。由于基于特征的匹配方法信息量大、抗干扰能力强,所以一直是研究的热点。
2、传统的harris算法计算量小,对图像的旋转、光照变化等都具有很好的稳定性。但是,当尺度发生变换时,将降低harris 角点的可重复率。尺度不变特征变换sift算法是由lowe在1999年提出并于2004年进行了改善。此算法对于图像的平移、尺度缩放、旋转、亮度变化以及仿射变换等都能保持良好的稳定性,但计算量较大,严重影响算法的实时性。在fast算法中,只是通过比较像素间的亮度来选取角点,所以计算复杂度低,实时性较好,但易受外部环境的影响,而且检测出的角点数量很大,精确度低,它也有重复性不强、分布不均匀的缺点。此外,fast角点没有方向信息。同时,由于它利用恒定半径为3的圆,所以不具有尺度不变性。。
技术实现思路
1、本发明的目的在于克服现有技术中的不足,提供一种图像匹配方法、设备及存储介质,能够提高图像匹配的精确度和稳定性。
2、为达到上述目的,本发明是采用下述技术方案实现的:
3、第一方面,本发明提供一种图像匹配方法,包括:
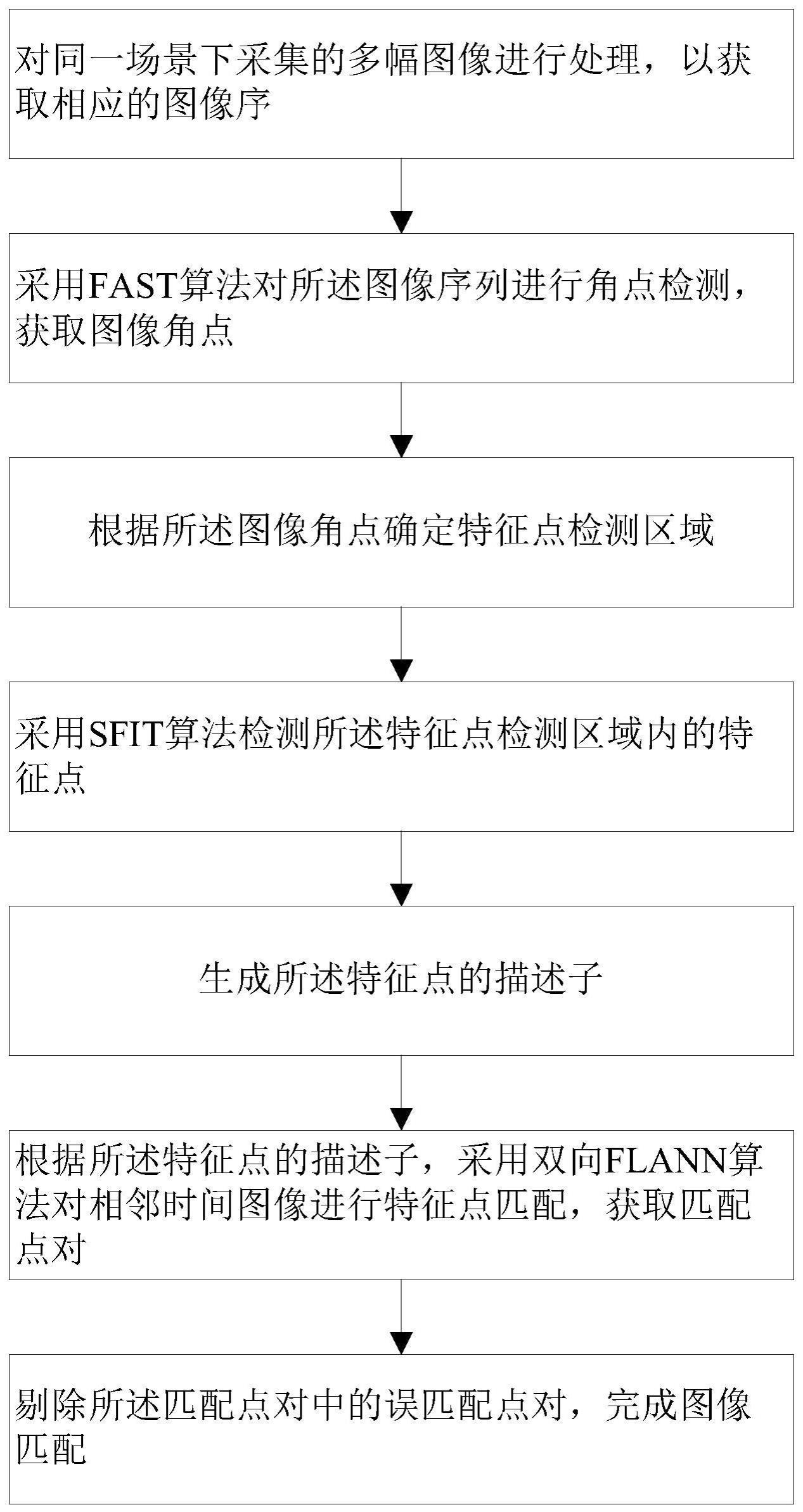
4、对同一场景下采集的多幅图像进行处理,以获取相应的图像序列;
5、采用fast算法对所述图像序列进行角点检测,获取图像角点;
6、根据所述图像角点确定特征点检测区域;
7、采用sfit算法检测所述特征点检测区域内的特征点;
8、生成所述特征点的描述子;
9、根据所述特征点的描述子,采用双向flann算法对相邻时间图像进行特征点匹配,获取匹配点对;
10、剔除所述匹配点对中的误匹配点对,完成图像匹配。
11、结合第一方面,进一步的,所述采用sfit算法检测所述特征点检测区域内的特征点,包括:
12、根据所述特征点检测区域建立高斯金字塔尺度空间,并基于所述高斯金字塔尺度空间建立dog尺度空间;
13、将所述图像角点与dog尺度空间的26个像素点进行比较,如果所述图像角点的像素值在dog尺度空间的26个像素点的像素值中是最大值或最小值,则认为该图像角点是其所在dog尺度空间下图像的一个特征点,其中dog尺度空间的26个像素点包括当前dog尺度空间相邻的8个像素点、上下两个dog尺度空间中相邻的9个像素点。
14、结合第一方面,进一步的,如果角点邻域的dog尺度空间内存在特征点,则保留所述dog尺度空间;否则,删除所述dog尺度空间。
15、结合第一方面,进一步的,所述生成所述特征点的描述子,包括:
16、根据所述特征点的16×16领域点像素的梯度幅值确定所述特征点的主方向;
17、以特征点为中心选取一个16×16大小的区域,用箭头方向表示特征点的梯度方向,箭头长度表示梯度模值,用尺度因子为高斯窗口二分之一的高斯权重函数对所述特征点的领域点像素的梯度模值进行加权运算;
18、在每个4×4的小区域内计算8个方向的梯度信息,得到128维的向量,所述向量和所述特征点的主方向即为所述特征点的描述子。
19、结合第一方面,进一步的,所述采用双向flann算法对相邻时间图像进行特征点匹配,获取匹配点对,包括:
20、使用flann算法对所述相邻时间图像的特征点的描述子进行匹配,获取第一计算顺序候选匹配点对;
21、交换所述相邻时间图像特征点的描述子的计算顺序,使用flann算法对所述相邻时间图像特征点的描述子进行匹配,获取第二计算顺序候选匹配点对;
22、获取所述所述第一计算顺序候选匹配点对与所述第二计算顺序候选匹配点对的交集作为所述匹配点对。
23、结合第一方面,进一步的,所述采用双向flann算法对相邻时间图像进行特征点匹配,获取匹配点对,包括:
24、使用flann算法对所述相邻时间图像的特征点的描述子进行匹配,获取第一计算顺序候选匹配点对;
25、交换所述第一计算顺序候选匹配点对中所述相邻时间图像的特征点的描述子的计算顺序,通过使用flann算法对所述第一计算顺序候选匹配点对中所述相邻时间图像的特征点的描述子进行匹配,从所述第一计算顺序候选匹配点对中筛选出所述匹配点对。
26、结合第一方面,进一步的,采用ransac算法剔除所述匹配点对中的误匹配点对。
27、结合第一方面,进一步的,使用ransac算法剔除误匹配点对的过程中,根据随机选择的4对匹配点对计算单应性矩阵。
28、第二方面,本发明提供一种计算机可读存储介质,其上存储有计算机程序,该程序被处理器执行时实现第一个方面任一项所述方法的步骤。
29、第三方面,本发明提供一种电子设备,包括处理器与所述处理器连接的存储器,在所述存储器内存储有计算机程序,当所述计算机程序被所述处理器执行时,执行第一方面任一项所述方法的步骤。
30、与现有技术相比,本发明所达到的有益效果:
31、本发明利用fast进行角点检测,根据fast检测到角点的区域确定sift角点检测的区域,提高了特征点的稳定性,使特征点更加可靠;采用双向flann算法完成特征点匹配,提高了特征点匹配的精度。本发明具有很强的鲁棒性。
技术特征:
1.一种图像匹配方法,其特征是,包括:
2.根据权利要求1所述的图像匹配方法,其特征是,所述采用sfit算法检测所述特征点检测区域内的特征点,包括:
3.根据权利要求2所述的图像匹配方法,其特征是,如果角点邻域的dog尺度空间内存在特征点,则保留所述dog尺度空间;否则,删除所述dog尺度空间。
4.根据权利要求1所述的图像匹配方法,其特征是,所述生成所述特征点的描述子,包括:
5.根据权利要求1所述的图像匹配方法,其特征是,所述采用双向flann算法对相邻时间图像进行特征点匹配,获取匹配点对,包括:
6.根据权利要求1所述的图像匹配方法,其特征是,所述采用双向flann算法对相邻时间图像进行特征点匹配,获取匹配点对,包括:
7.根据权利要求1所述的图像匹配方法,其特征是,采用ransac算法剔除所述匹配点对中的误匹配点对。
8.根据权利要求7所述的图像匹配方法,其特征是,使用ransac算法剔除误匹配点对的过程中,根据随机选择的4对匹配点对计算单应性矩阵。
9.一种计算机可读存储介质,其上存储有计算机程序,其特征在于,该程序被处理器执行时实现权利要求1~8任一项所述方法的步骤。
10.一种电子设备,其特征在于,包括处理器与所述处理器连接的存储器,在所述存储器内存储有计算机程序,当所述计算机程序被所述处理器执行时,执行如权利要求1~8任一项所述方法的步骤。
技术总结
本发明公开了图像处理领域的一种图像匹配方法、设备及存储介质,所述方法包括:对同一场景下采集的多幅图像进行处理,以获取相应的图像序列;采用FAST算法对所述图像序列进行角点检测,获取图像角点;根据所述图像角点确定特征点检测区域;采用SFIT算法检测所述特征点检测区域内的特征点;生成所述特征点的描述子;根据所述特征点的描述子,采用双向FLANN算法对相邻时间图像进行特征点匹配,获取匹配点对;剔除所述匹配点对中的误匹配点对,完成图像匹配。本发明能够提高图像匹配的精确度和稳定性。
技术研发人员:杨琼楠,吴力涛,孙帮东,陈剑钧,仇晨光,薛海英
受保护的技术使用者:华东光电集成器件研究所
技术研发日:
技术公布日:2024/1/15
- 还没有人留言评论。精彩留言会获得点赞!