一种基于激光点云的输电线路确定算法的制作方法
本发明属于数据处理的,具体地涉及一种基于激光点云的输电线路确定算法。
背景技术:
1、机载激光扫描技术是一种新兴的主动式三维对地观测技术,是继全球卫星导航系统广泛使用以来在遥感测绘领域的又一场技术革命。它集成了激光测距技术、航空摄影测量技术、高动态载体姿态测定技术和高精度动态gnss差分定位技术,能够快速获取大面积高精度的地面点云数据和高分辨率的数码影像,具有作业速度快、数据产品丰富、测量精度高、自动化程度高、受地形条件限制少等特点。
2、在输电线路的基本验收过程中,通过激光扫描出输电线路的点云数据,并通过在输电线路的整体点云数据中找出电线点以及地物点对,用于确定输电线与地物之间的距离。
3、现有技术中的输电线路确定算法,通常采用包围盒法找出电线点以及地物点对,但因为输电线是悬空于地面的线状体,其所占的实体空间很小;且地面景物一般是起伏不平的,整体空间中大部分是与它们互补的“空”空间,为这些“空”空间生成包围盒,很多都是空盒,大量的空盒容易导致了内存溢出,且耗时较长。
技术实现思路
1、为了解决上述技术问题,本发明提供了一种基于激光点云的输电线路确定算法,用于解决现有技术中提出的技术问题,该算法在运行过程中,避免了空盒的产生,不再发生内存溢出的情况,且找出电线点以及地物点对较为快速,耗时较短。
2、本发明实施例提供以下技术方案,一种基于激光点云的输电线路确定算法,其特征在于,所述输电线路确定算法包括以下步骤:
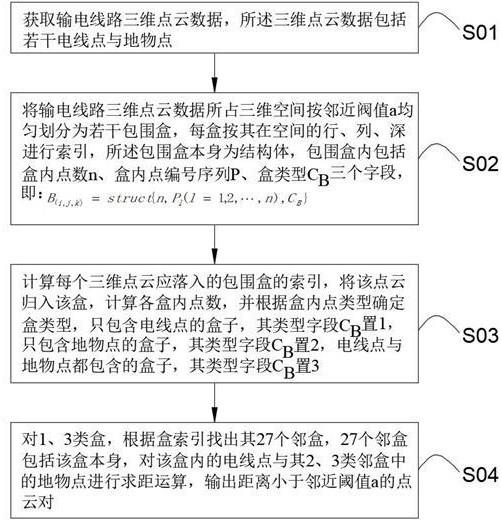
3、s01、获取输电线路三维点云数据,所述三维点云数据包括若干电线点与地物点;
4、s02、将输电线路三维点云数据所占三维空间按邻近阀值a均匀划分为若干包围盒,每盒按其在空间的行、列、深进行索引,所述包围盒本身为结构体,包围盒内包括盒内点数n、盒内点编号序列p、盒类型cb三个字段,即;
5、s03、计算每个三维点云应落入的包围盒的索引,将该点云归入该盒,计算各盒内点数,并根据盒内点类型确定盒类型,只包含电线点的盒子,其类型字段cb置1,只包含地物点的盒子,其类型字段cb置2,电线点与地物点都包含的盒子,其类型字段cb置3;
6、s04、对1、3类盒,根据盒索引找出其27个邻盒,27个邻盒包括该盒本身,对该盒内的电线点与其2、3类邻盒中的地物点进行求距运算,输出距离小于邻近阈值a的点云对;
7、在所述步骤s02中,所述包围盒内还包括有盒的三维索引i、 j、k,即;
8、在所述步骤s03中,按邻近阈值a将点云空间划分成若干子空间,遍历各子空间,以其6个边界面为界使用find函数找出属于该子空间的所有点云,当find到的点数不为0时,生成一个新盒,且将find到的点归入该盒中,将子空间的三维索引i、 j和k值赋给该盒的前3个字段。
9、相比现有技术,本申请的有益效果为:本申请将包围盒编号由三维降为一维,使得本申请在运行算法找出电线点与地物点对的过程较为快速,耗时较短,且不会产生空盒,不会出现内存溢出的情况。
10、较佳的,在所述步骤s01中,所述三维点云数据为由个点云组成的三维激光雷达点云集合,每个点云的数据是一个由三维坐标 和点的类型组成的4元素行向量,在三维激光雷达点云集合中有个电线点和个地物点。
11、较佳的,在所述步骤s02中,将输电线路三维点云数据所占三维空间分成若干边长为a的子空间,并按先行、再列、后深的遍历顺序给这些子空间编上一维索引,即。
12、较佳的,在所述步骤s03中,计算各点云应落子空间的行、列、深序号,计算它们对应的一维子空间索引,将该索引值赋给点结构体第5列,并对所有点云按此列排序;修改包围盒结构体为等长度的4元素行向量:,其中表示该盒包含排序后编号为的所有点;将排序后的点云生成、归入包围盒。
13、较佳的,所述将排序后的点云生成、归入包围盒步骤中包括:将第5列值相同的连续点归入同一个盒子,第5列值变化时生成新盒子,连续点中的第一个点为、最后一个点为。
14、较佳的,所述步骤s02中还包括:对输电线路三维点云数据所占三维空间按8a、4a、2a、a几个分辨率层次依次进行步骤s02、步骤s03、步骤s04运算,在每个分辨率层次上,删减不与2、3类盒相邻的1类盒以及不与1、3类盒相邻的2类盒。
15、较佳的,在删减1类盒时,提取每个1类盒的,将其用repmat函数扩展成26行的列向量,其元素的值取为该盒的26个邻盒的,对这个列向量用ismember函数判断是否属于2、3类盒的索引集,返回值是一个由26个0或1组成的列向量,其中0表示对应元素不在2、3类盒索引集中,1表示对应元素在2、3类盒索引集中,对此向量用sum求和;当和等于0时,将中心的1类盒删减掉;对经过1类盒删减后的包围盒集再按同样方法进行2类盒删减。
技术特征:
1.一种基于激光点云的输电线路确定算法,其特征在于,所述输电线路确定算法包括以下步骤:
2. 根据权利要求1所述的基于激光扫描技术的输电线路净空排查算法,其特征在于,在所述步骤s01中,所述三维点云数据为由个点云组成的三维激光雷达点云集合,每个点云的数据是一个由三维坐标 和点的类型组成的4元素行向量,在三维激光雷达点云集合中有个电线点和个地物点。
3.根据权利要求1所述的基于激光扫描技术的输电线路净空排查算法,其特征在于,在所述步骤s02中,将输电线路三维点云数据所占三维空间分成若干边长为a的子空间,并按先行、再列、后深的遍历顺序给这些子空间编上一维索引,即。
4.根据权利要求3所述的基于激光扫描技术的输电线路净空排查算法,其特征在于,在所述步骤s03中,计算各点云应落子空间的行、列、深序号,计算它们对应的一维子空间索引,将该索引值赋给点结构体第5列,并对所有点云按此列排序;修改包围盒结构体为等长度的4元素行向量:,其中表示该盒包含排序后编号为的所有点;将排序后的点云生成、归入包围盒。
5.根据权利要求4所述的基于激光扫描技术的输电线路净空排查算法,其特征在于,所述将排序后的点云生成、归入包围盒步骤中包括:将第5列值相同的连续点归入同一个盒子,第5列值变化时生成新盒子,连续点中的第一个点为、最后一个点为。
6.根据权利要求5所述的基于激光扫描技术的输电线路净空排查算法,其特征在于,所述步骤s02中还包括:对输电线路三维点云数据所占三维空间按8a、4a、2a、a几个分辨率层次依次进行步骤s02、步骤s03、步骤s04运算,在每个分辨率层次上,删减不与2、3类盒相邻的1类盒以及不与1、3类盒相邻的2类盒。
7.根据权利要求6所述的基于激光扫描技术的输电线路净空排查算法,其特征在于,在删减1类盒时,提取每个1类盒的,将其用repmat函数扩展成26行的列向量,其元素的值取为该盒的26个邻盒的,对这个列向量用ismember函数判断是否属于2、3类盒的索引集,返回值是一个由26个0或1组成的列向量,其中0表示对应元素不在2、3类盒索引集中,1表示对应元素在2、3类盒索引集中,对此向量用sum求和;当和等于0时,将中心的1类盒删减掉;对经过1类盒删减后的包围盒集再按同样方法进行2类盒删减。
技术总结
本发明提供了一种基于激光点云的输电线路确定算法,所述输电线路确定算法包括以下步骤:获取输电线路三维点云数据;将输电线路三维点云数据所占三维空间按邻近阀值a均匀划分为若干包围盒,每盒按其在空间的行、列、深进行索引;计算每个三维点云应落入的包围盒的索引,将该点云归入该盒,计算各盒内点数,并根据盒内点类型确定盒类型;对1、3类盒,根据盒索引找出其27个邻盒,27个邻盒包括该盒本身,对该盒内的电线点与其2、3类邻盒中的地物点进行求距运算,输出距离小于邻近阈值a的点云对,本发明在运行算法找出电线点与地物点对的过程较为快速,耗时较短,且不会产生空盒,不会出现内存溢出的情况。
技术研发人员:肖子洋,何群,李路明,王华,周洋,邱日轩,刘显明,彭超,沈宏杰
受保护的技术使用者:国网江西省电力有限公司信息通信分公司
技术研发日:
技术公布日:2024/1/15
- 还没有人留言评论。精彩留言会获得点赞!