一种基于超声相控阵的隧道损伤检测方法及系统与流程
本发明涉及隧道损伤检测,特别地涉及一种基于超声相控阵的隧道损伤检测方法及系统。
背景技术:
1、在城市地铁的使用过程中,受岩土结构老化、车辆运行等的影响,地铁隧道出现衬砌脱空、裂缝、形变等安全隐患,地铁运营受到影响。对于采用人工目视检测或单一指标仪器检测的地铁隧道损伤检测方式而言,检测效率和精度难以满足实际需求。目前,城市隧道安全综合探测车是检测城市隧道损伤的工具之一,通过在其上搭载红外成像、激光扫描等设备,可实现对隧道的损伤检测。
2、超声相控阵技术目前已被广泛应用于工业生产、交通等领域,可以有效地检测复杂形状的内部缺陷,并且精度较高,将其应用于城市地铁隧道检测,可以更好地保障城市地铁隧道运行安全。
技术实现思路
1、本申请所要解决的技术问题是提供一种基于超声相控阵的隧道损伤检测方法及系统,基于超声相控阵技术对城市地铁隧道进行损伤检测,以更好地保障城市地铁隧道运行安全。
2、作为本申请的一个方面,提供一种基于超声相控阵的隧道损伤检测方法,所述方法包括:
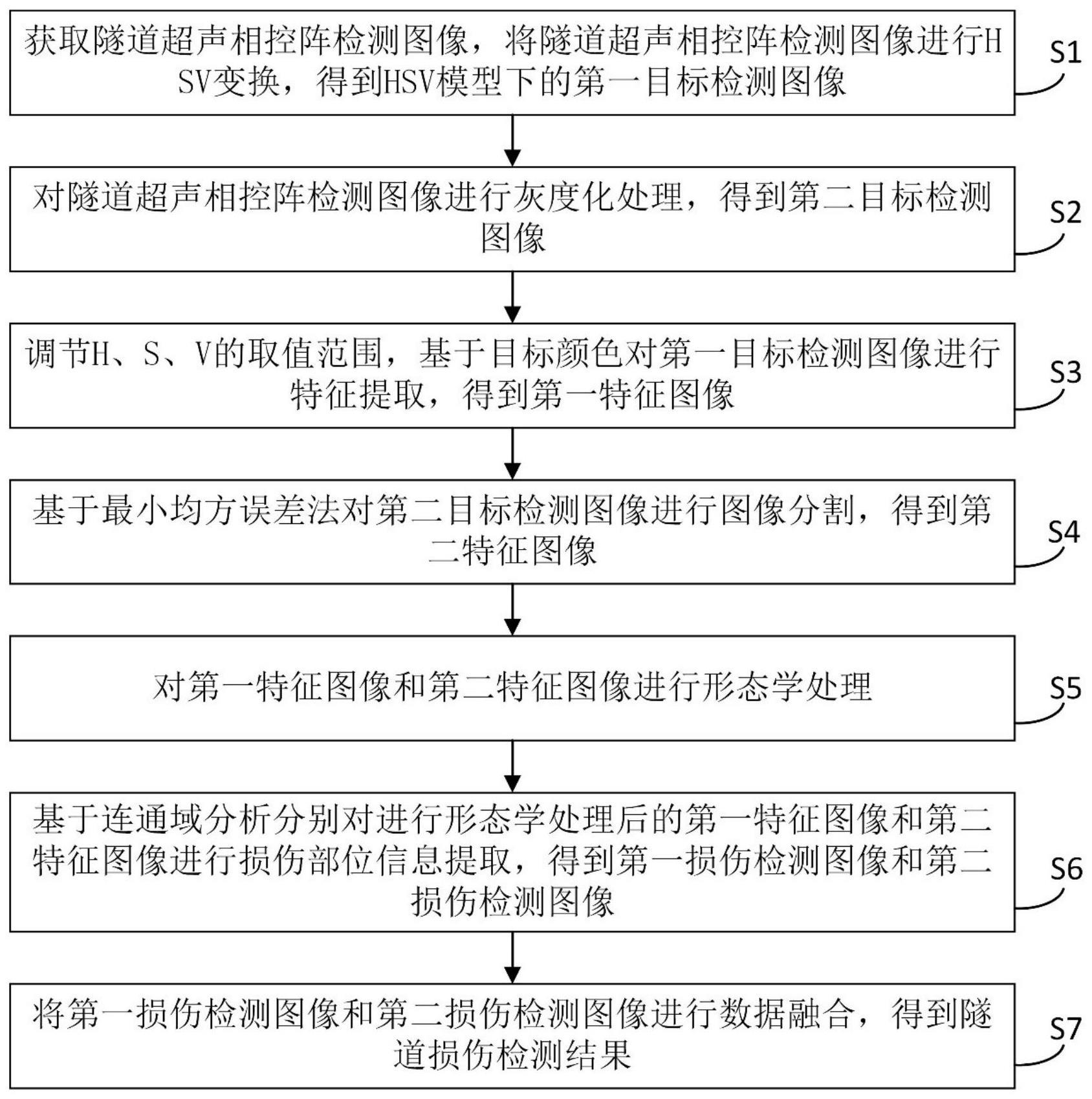
3、获取隧道超声相控阵检测图像,所述隧道超声相控阵检测图像为rgb模型下的图像,将所述隧道超声相控阵检测图像进行hsv变换,得到hsv模型下的第一目标检测图像;
4、对所述隧道超声相控阵检测图像进行灰度化处理,得到第二目标检测图像;
5、调节h、s、v的取值范围,基于目标颜色对所述第一目标检测图像进行特征提取,得到第一特征图像;
6、基于最小均方误差法对所述第二目标检测图像进行图像分割,得到第二特征图像;
7、对所述第一特征图像和所述第二特征图像进行形态学处理,基于连通域分析分别对进行形态学处理后的所述第一特征图像和所述第二特征图像进行损伤部位信息提取,得到第一损伤检测图像和第二损伤检测图像,将所述第一损伤检测图像和所述第二损伤检测图像进行数据融合,得到隧道损伤检测结果。
8、进一步地,所述基于最小均方误差法对所述第二目标检测图像进行图像分割,得到第二特征图像,包括:
9、统计所述第二目标检测图像每个灰度级的出现频次,得到所述第二目标检测图像的灰度直方图,计算所述第二目标检测图像中每个灰度级对应的像素点总数;
10、按照灰度级从小到大的顺序遍历每个灰度级,分别计算大于和小于每个灰度级的区域内的像素点灰度平均值本灰度方差值,计算大于和小于每个灰度级的两个区域的灰度方差值之和;
11、选择遍历每个灰度级的过程中,两个区域的灰度方差值之和最小值对应的灰度级作为分割阈值,基于所述分割阈值对所述第二目标检测图像进行图像分割,得到所述第二特征图像。
12、进一步地,所述调节h、s、v的取值范围,基于目标颜色对所述第一目标检测图像进行特征提取,得到第一特征图像,包括:
13、对于所述第一目标检测图像,提取出h值为0-10和170-180、s值为50-255、v值为50-255的第一前景特征,提取出h值为60-80、s值为30-100、v值为200-255的第二前景特征,将所述第一前景特征和所述第二前景特征作为所述第一特征图像的损伤特征内容,将所述第一目标检测图像中的剩余内容作为所述第一特征图像的背景内容,构建得到所述第二特征图像。
14、进一步地,所述将所述第一损伤检测图像和所述第二损伤检测图像进行数据融合,得到隧道损伤检测结果,包括:
15、将所述第一损伤检测图像和所述第二损伤检测图像映射在融合图像上,所述融合图像以所述第一损伤检测图像/所述第二损伤检测图像为原型;
16、对于所述融合图像,保留所述第一损伤检测图像和所述第二损伤检测图像重叠的部分,得到融合特征,对于剩余部分,遍历所述融合图像剩余部分的每个像素点,若所述融合图像剩余部分的任意像素点存在所述第一损伤检测图像/所述第二损伤检测图像的内容,计算该像素点与所述融合特征中多个像素点的距离最小值,判断所述距离最小值是否小于预设阈值,若是则将该像素点列入融合特征,否则舍弃该像素点对应的所述第一损伤检测图像/所述第二损伤检测图像的内容,遍历所述融合图像后得到的所述融合特征作为所述隧道损伤检测结果。
17、进一步地,所述对所述第一特征图像和所述第二特征图像进行形态学处理,包括:
18、采用腐蚀、膨胀、开运算和闭运算中的一种或多种方式对所述第一特征图像和所述第二特征图像进行形态学处理。
19、进一步地,所述对所述隧道超声相控阵检测图像进行灰度化处理,包括:
20、基于分量法将所述隧道超声相控阵检测图像灰度化处理。
21、作为本申请的另一个方面,提供一种基于超声相控阵的隧道损伤检测系统,所述系统包括:
22、图像获取模块,用于获取隧道超声相控阵检测图像;
23、图像预处理模块,用于对所述隧道超声相控阵检测图像进行hsv变换,得到hsv模型下的第一目标检测图像,对所述隧道超声相控阵检测图像进行灰度化处理,得到第二目标检测图像;
24、第一处理模块,用于对所述第一目标检测图像进行特征提取,得到第一特征图像,对所述第二目标检测图像进行图像分割,得到第二特征图像;
25、第二处理模块,用于对所述第一特征图像和所述第二特征图像进行形态学处理;
26、损伤提取模块,用于基于连通域分析分别对进行形态学处理后的所述第一特征图像和所述第二特征图像进行损伤部位信息提取,得到第一损伤检测图像和第二损伤检测图像;
27、数据融合模块,用于将所述第一损伤检测图像和所述第二损伤检测图像进行数据融合,得到隧道损伤检测结果。
28、进一步地,对于所述第二处理模块,还包括:
29、采用腐蚀、膨胀、开运算和闭运算中的一种或多种方式对所述第一特征图像和所述第二特征图像进行形态学处理。
30、本申请具有以下优点:
31、本申请基于超声相控阵技术获取隧道超声相控阵检测图像,分别对图像进行hsv变换和灰度化处理,分别对处理结果进行特征提取、特征增强和特征再提取,并对得到的检测图像进行数据融合,提高隧道损伤检测结果的准确性,为城市地铁隧道运行安全提供保障。
技术特征:
1.一种基于超声相控阵的隧道损伤检测方法,其特征在于,所述方法包括:
2.如权利要求1所述的一种基于超声相控阵的隧道损伤检测方法,其特征在于,所述基于最小均方误差法对所述第二目标检测图像进行图像分割,得到第二特征图像,包括:
3.如权利要求1所述的一种基于超声相控阵的隧道损伤检测方法,其特征在于,所述调节h、s、v的取值范围,基于目标颜色对所述第一目标检测图像进行特征提取,得到第一特征图像,包括:
4.如权利要求1所述的一种基于超声相控阵的隧道损伤检测方法,其特征在于,所述将所述第一损伤检测图像和所述第二损伤检测图像进行数据融合,得到隧道损伤检测结果,包括:
5.如权利要求1所述的一种基于超声相控阵的隧道损伤检测方法,其特征在于,所述对所述第一特征图像和所述第二特征图像进行形态学处理,包括:
6.如权利要求1所述的一种基于超声相控阵的隧道损伤检测方法,其特征在于,所述对所述隧道超声相控阵检测图像进行灰度化处理,包括:
7.一种基于超声相控阵的隧道损伤检测系统,其特征在于,所述系统包括:
8.如权利要求7所述的一种基于超声相控阵的隧道损伤检测系统,其特征在于,
技术总结
本发明提供一种基于超声相控阵的隧道损伤检测方法及系统。一种基于超声相控阵的隧道损伤检测方法,包括:获取隧道超声相控阵检测图像,将图像进行HSV变换,得到第一目标检测图像;对图像进行灰度化处理,得到第二目标检测图像;分别对第一目标检测图像和第二目标检测图像进行特征提取和图像分割,得到第一特征图像和第二特征图像;进行损伤部位信息提取和数据融合,得到隧道损伤检测结果。本申请基于超声相控阵技术获取隧道超声相控阵检测图像,分别对图像进行HSV变换和灰度化处理,分别对处理结果进行特征提取、特征增强和特征再提取,并对得到的检测图像进行数据融合,提高隧道损伤检测结果的准确性,为城市地铁隧道运行安全提供保障。
技术研发人员:阮腾达,蔡国强,仝聪,蔡张赫恒,马佳新,汤德炫
受保护的技术使用者:厦门交测智能科技有限公司
技术研发日:
技术公布日:2024/1/16
- 还没有人留言评论。精彩留言会获得点赞!