一种基于履带车辆振动特征的卷积神经网络路面不平度识别方法
本发明涉及神经网络领域,具体涉及一种基于履带车辆振动特征的卷积神经网络(convolutional neural networks,cnn)路面不平度识别方法。
背景技术:
1、路面不平是履带车辆行驶过程中振动的主要激励,路面对左右履带的激励,经过悬架衰减后传递至车体,从而对履带车辆的双向稳定性造成不利的影响,因此准确重构路面不平度是行进间履带车辆动力学模型的关键部分,也是验证控制策略有效性的基础。
2、随着人工智能的逐渐普及,国内外学者开始使用神经网络识别路面不平度,神经网络能够快速提取深层特征且具有良好的鲁棒性,在路面不平度的识别中取得很好的效果,但他们大多针对的是轮式车辆,而履带车辆与轮式车辆相比,结构更加复杂,导致其行驶在不平路面上产生的振动响应也较为复杂,在此之前,还没有相关技术运用于履带车辆的路面不平度识别中。
技术实现思路
1、本发明的目的在于提出了一种基于履带车辆振动特征的卷积神经网络路面不平度识别方法。
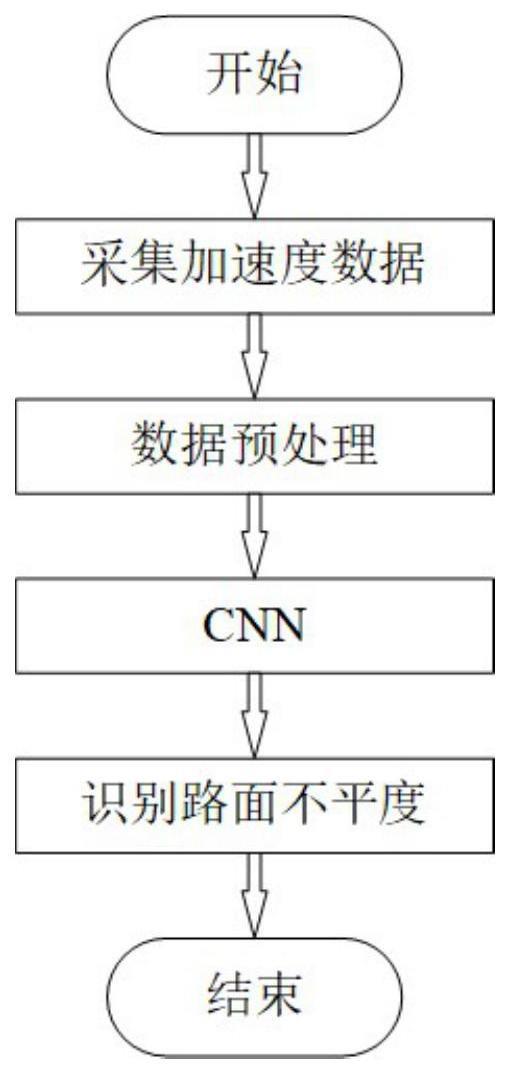
2、实现本发明目的的技术解决方案为:一种基于履带车辆振动特征的卷积神经网络路面不平度识别方法,包括如下步骤:
3、步骤一:采集a、b、c、d四个路面等级的加速度数据;
4、步骤二:运用时频域分析方法分析各级路面的加速度数据特征,确定制作加速度样本时滑动窗口大小和步长;
5、步骤三:对采集到的加速度数据进行预处理,建立数据库;
6、步骤四:将步骤三建立的数据库作为cnn的输入,路面不平度作为cnn的输出,通过对cnn进行训练和测试,从而识别出路面不平度的等级。
7、进一步的,步骤一中,采集a、b、c、d四个路面等级的加速度数据,具体方法为:
8、按照国家标准文件《机械振动道路路面谱测量数据报告》中所述,路面功率谱密度可将路面的不平程度分为8个等级,本发明所需的a、b、c、d四个等级的路面对应的路面不平度系数区间分别为[8,32]、[32,128]、[128,512]、[512,2048]。分别在a、b、c、d四个等级的路面上采集加速度数据,在车体质心设置监测点来获取行进间履带车辆x轴、y轴和z轴方向加速度,并分别将监测点的采样步长设置为0.5秒和0.1秒,从而获得不同采样步长下的加速度数据。通过改变履带车辆的行驶速度,获得5km/h、10km/h、15km/h、20km/h、25km/h、30km/h、35km/h和40km/h这八种工况下的行进间履带车辆加速度数据。
9、进一步的,步骤二中,运用时频域分析方法分析各级路面的加速度数据特征,确定制作加速度样本时滑动窗口大小和步长,具体方法为:
10、首先,运用傅里叶变换对加速度数据进行频域分析,得到加速度数据的频谱图,通过分析频谱图找出各级路面加速度数据的特征频率范围;然后,运用小波变换对加速度数据进行时频域分析,得到加速度数据的时频图,根据特征频率在时间上的分布情况确定制作加速度样本时滑动窗口大小和步长;最终确定0.5秒采样步长下的滑动窗口大小为50个时间步长,即25s,滑动步长为5个时间步长,即2.5s;0.1秒采样步长下的滑动窗口大小为300个时间步长,即30s,滑动步长为10个时间步长,即1s。
11、进一步的,步骤三中,对采集到的加速度数据进行预处理,建立数据库,具体方法为:
12、首先,采用窗口滑动的方式在加速度数据上进行滑动取样,其中不同采样步长下的滑动窗口大小和步长不同,0.5秒采样步长下的滑动窗口大小为50个时间步长,滑动步长为5个时间步长;0.1秒采样步长下的滑动窗口大小为300个时间步长,滑动步长为10个时间步长。为采样后的样本设置对应道路不平度的等级标签。
13、然后,将加速度数据的初始样本划分为训练集(80%)和测试集(20%)。此时每个样本包含加速度数据和其对应的标签,将加速度数据单独抽出进行归一化处理,将值缩放到-1和1之间,具体指先计算加速度数据的最大值xmax和最小值xmin,运用公式进行归一化处理,其中xi代表实际加速度数据,xi代表归一化后的加速度数据。
14、最后,打乱样本的排列顺序。
15、进一步的,步骤四中,将步骤三建立的数据库作为cnn的输入,路面不平度作为cnn的输出,通过对cnn进行训练和测试,从而识别出路面不平度的等级,具体方法为:
16、cnn由两个卷积层、一个池化层和两个全连接层构成。经过两轮卷积和一轮池化操作后,提取出加速度数据的深层特征。使用归一化指数(softmax)交叉熵作为损失函数,计算加速度数据经cnn后的输出与真实标签之间的误差,根据所得误差更新cnn参数使得加速度数据的分类差异最小化。训练时分别采用四种输入方案:1)0.5秒采样步长下的垂直加速度。2)0.1秒采样步长下的垂直加速度。3)0.5秒采样步长下的三个方向加速度。4)0.1秒采样步长下的三个方向加速度。当输入为垂直方向加速度时,cnn使用单个输入通道接收加速度数据。当输入为三个方向加速度时,cnn使用三个输入通道分别接收x轴、y轴、z轴三个方向加速度数据。然后分别在5km/h、10km/h、15km/h、20km/h、25km/h、30km/h、35km/h和40km/h这八种工况下对这四种输入方案进行实验,通过比较不同输入的分类准确率来确定最优输入方案。实验证明,以0.1秒采样步长采集三个方向加速度数据作为输入是最优输入方案。
17、一种基于履带车辆振动特征的卷积神经网络路面不平度识别方法,基于任一项所述的方法,进行基于履带车辆振动特征的卷积神经网络路面不平度识别。
18、一种计算机设备,包括存储器、处理器及存储在存储器上并可在处理器上运行的计算机程序,所述处理器执行所述计算机程序时实现任一项所述的方法,进行基于履带车辆振动特征的卷积神经网络路面不平度识别。
19、一种计算机可读存储介质,其上存储有计算机程序,所述计算机程序被处理器执行时实现任一项所述的方法,进行基于履带车辆振动特征的卷积神经网络路面不平度识别。
20、本发明与现有技术相比,其显著优点为:1)首次将cnn运用于履带车辆的路面不平度识别中。考虑到目前还没有相关技术用于解决履带车辆行进间路面不平度的识别问题,本发明在履带车辆的特殊应用场景下,成功运用cnn识别路面不平度。2)对于如何选择滑动窗口大小和步长的问题,研究人员大多采用试凑法或自身经验来确定,很少采用理论的分析方法。本发明运用傅里叶变换和小波变换方法分析履带车辆的振动特征,根据振动特征在时间域上的分布情况确定滑动窗口大小和步长。3)履带车辆的振动响应与轮式车辆不同,如何选择加速度数据的输入方案使得cnn能最大程度提取到有效特征是需要解决的一个问题。cnn的准确率指标可以判断cnn是否提取到有效特征,因此本发明通过比较不同采样步长和不同维度的加速度作为输入时cnn的识别准确率来确定最优输入方案。
技术特征:
1.一种基于履带车辆振动特征的卷积神经网络路面不平度识别方法,其特征在于,包括如下步骤:
2.根据权利要求1所述的一种基于履带车辆振动特征的卷积神经网络路面不平度识别方法,其特征在于,步骤一,采集a、b、c、d四个路面等级的加速度数据,具体方法为:
3.根据权利要求1所述的一种基于履带车辆振动特征的卷积神经网络路面不平度识别方法,其特征在于,步骤二,运用时频域分析方法分析各级路面的加速度数据特征,确定制作加速度样本时滑动窗口大小和步长,具体方法为:
4.根据权利要求1所述的一种基于履带车辆振动特征的卷积神经网络路面不平度识别方法,其特征在于,步骤三,对采集到的加速度数据进行预处理,建立数据库,具体方法为:
5.根据权利要求1所述的一种基于履带车辆振动特征的卷积神经网络路面不平度识别方法,其特征在于,步骤四,设置采样步长和加速度方向,构建不同的训练数据库,将预处理后的加速度作为cnn的输入,将路面不平度作为cnn的输出,训练路面不平度的等级识别模型,其中:
6.根据权利要求1所述的一种基于履带车辆振动特征的卷积神经网络路面不平度识别方法,其特征在于,步骤四,设置采样步长和加速度方向,构建不同的训练数据库,将预处理后的加速度作为cnn的输入,将路面不平度作为cnn的输出,训练路面不平度的等级识别模型,其中:
7.基于履带车辆振动特征的卷积神经网络路面不平度识别,其特征在于,基于权利要求1-6任一项所述的方法,进行基于履带车辆振动特征的卷积神经网络路面不平度识别。
8.一种计算机设备,包括存储器、处理器及存储在存储器上并可在处理器上运行的计算机程序,所述处理器执行所述计算机程序时实现权利要求1-6任一项所述的方法,进行基于履带车辆振动特征的卷积神经网络路面不平度识别。
9.一种计算机可读存储介质,其上存储有计算机程序,所述计算机程序被处理器执行时实现权利要求1-6任一项所述的方法,进行基于履带车辆振动特征的卷积神经网络路面不平度识别。
技术总结
本发明提出一种基于卷积神经网络的行进间履带车辆路面不平度识别方法方法,采集A、B、C、D四个路面等级的加速度数据,运用时频域分析方法分析各级路面的加速度数据特征,确定滑动窗口大小和步长;对采集到的加速度数据进行预处理,建立数据库;设置采样步长和加速度方向,构建不同的训练数据库,将预处理后的加速度作为CNN的输入,将路面不平度作为CNN的输出,分别进行路面不平度等级识别模型的训练;比较各路面不平度等级识别模型的分类准确率,选取最高分类准确率对应的采样步长、加速度方向和CNN参数为最优方案,完成路面不平度的等级识别。本发明能够通过履带车辆的振动响应来识别路面不平度。
技术研发人员:刘宗凯,陆莹,邹卫军,钱龙军,吴盘龙,王军,薄煜明
受保护的技术使用者:南京理工大学
技术研发日:
技术公布日:2024/1/15
- 还没有人留言评论。精彩留言会获得点赞!