一种基于数字孪生的智能装箱方法
本发明涉及智能制造,尤其涉及一种基于数字孪生的智能装箱方法。
背景技术:
1、目前,智能制造是制造业的发展方向,也是制造业转型升级的主攻方向,传统制造向智能制造转型发展的过程中,数字孪生技术已经成为了智能制造领域研究的热点。
2、传统制造业生产过程中装箱装载如何有效地利用装载空间,降低成本,一直是一个有待解决的难题,特别是对于一些玻璃,纸张,布匹的切割的行业当中的形状、大小存在差异的产品,对于这类产品的分拣和装箱工作中,存在的高度依赖于工人的个人经验,因此可能出现的由于人工装载策略不合理而使得最终的空间利用率低或者在人工不断尝试的造成的时间成本和人工成本的上升,直接导致装箱装载的效率变低,经营成本上升。
技术实现思路
1、为了解决上述问题,本发明提出了一种基于数字孪生的智能装箱方法。
2、具体方案如下:
3、一种基于数字孪生的智能装箱方法,包括以下步骤:
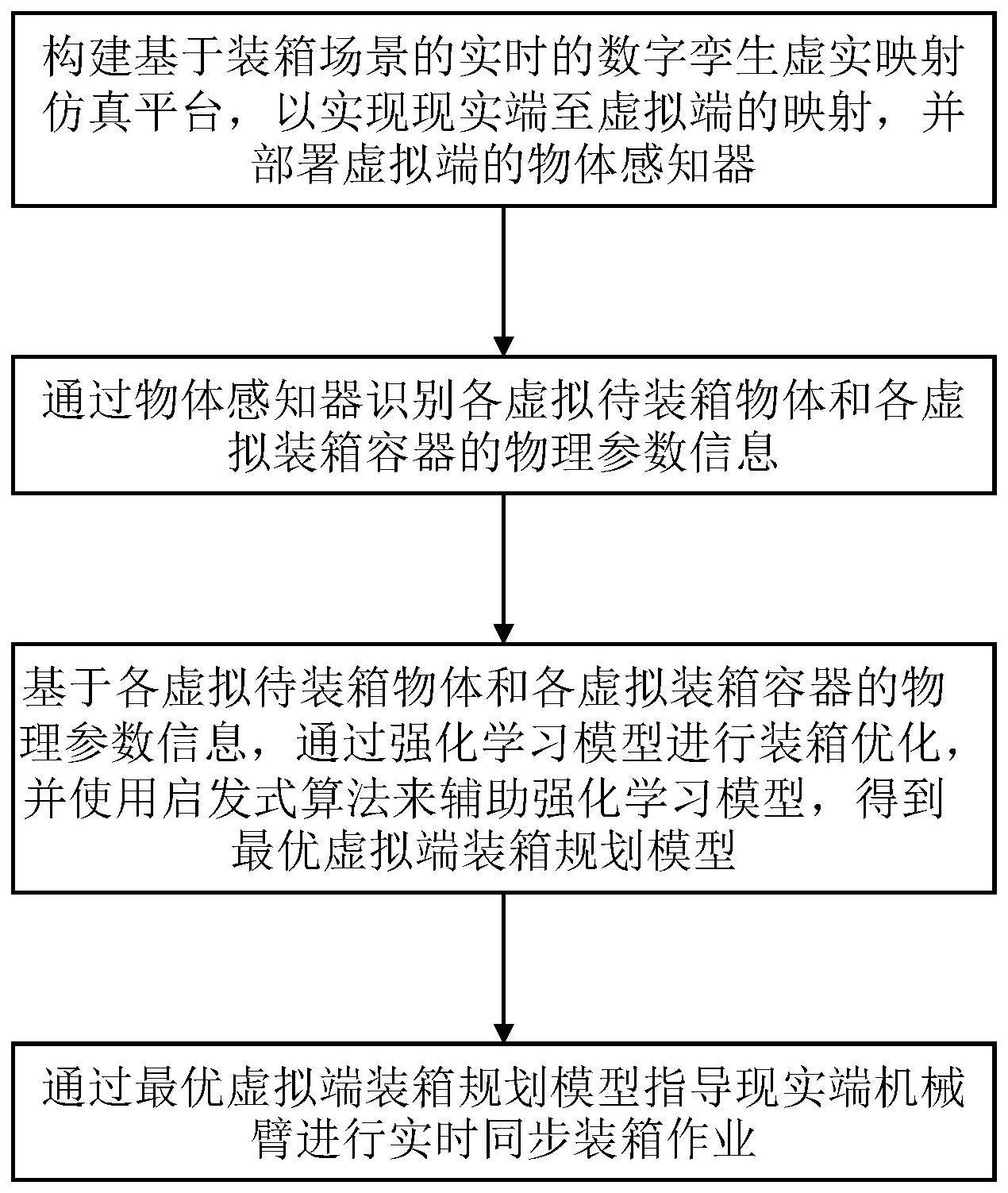
4、s1:构建基于装箱场景的实时的数字孪生虚实映射仿真平台,以实现现实端至虚拟端的映射,并部署虚拟端的物体感知器;数字孪生虚实映射仿真平台中的模型框架包括:装箱平台机械臂模型、机械柜模型、装箱容器模型和待装箱物体模型;
5、s2:通过物体感知器识别各虚拟待装箱物体和各虚拟装箱容器的物理参数信息;
6、s3:基于各虚拟待装箱物体和各虚拟装箱容器的物理参数信息,通过强化学习模型进行装箱优化,并使用启发式算法来辅助强化学习模型,得到最优虚拟端装箱规划模型;
7、s4:通过最优虚拟端装箱规划模型指导现实端机械臂进行实时同步装箱作业。
8、进一步的,装箱平台机械臂模型和机械柜模型的构建采用基于三维机械设计建模工具软件实现,其构建的模型与现实模型具有一样的刚性运动和受力信息。
9、进一步的,在装箱容器模型和待装箱物体模型的构建中,采集现实端待装箱物体和装箱容器的物理参数,并上传至虚拟端;虚拟端基于接收到的物理参数,采用基于动画建模工具软件构建对应的待装箱物体模型和装箱容器模型。
10、进一步的,待装箱物体和装箱容器的物理参数包括尺寸信息、物体姿态信息以及由标定坐标信息转换的世界坐标信息;待装箱物体的物理参数还包括类别信息。
11、进一步的,物体感知器的部署通过目标检测算法实现。
12、进一步的,强化学习装箱优化过程中的状态定义为:将每个物品或每个容器看作一个状态,状态由以下的元素组成,1)物品的尺寸;2)物品已经放置的位置:3)容器的剩余空间;
13、强化学习装箱优化过程中的动作定义为:在每个状态下,采取的动作是将一个物品放入一个容器中,每个动作的发生将改变状态,包括物品的位置和容器的剩余空间;
14、强化学习装箱优化过程的奖励函数定义为:将装箱的准确率和装箱容器的空间利用率作为奖励函数。
15、进一步的,装箱的准确率sacc的计算公式为:
16、sacc=(i,sc())
17、其中,x为待装箱物体的物料信息,sc为用于识别虚拟物体的信息的物体感知器,i为待装箱物体的物料的类别信息,b用于描述物料是否被正确分类。
18、进一步的,装箱容器的空间利用率的计算公式为:
19、
20、其中,sur()为装箱容器n的装箱空间利用率,xi为待装箱的物料,i表示待装箱的物料的序号,bn为待装箱容器n,ss为无图感知器获取物体的尺寸信息过程,ss(m,l)和ss(,w)分别表示对物体m获取其长l和宽w的尺寸信息。
21、本发明采用如上技术方案,并具有有益效果:
22、(1)提出了一种基于数字世界的深度学习目标检测模型和装箱规划模型融合指导现实端设备装箱作业的方法,特别针对于在现实端开展基于强化学习的机械臂装箱规划模型训练时,存在的实验成本高、实验周期长等的问题,本发明创新性地提出在模型正式部署前,于数字孪生的虚拟环境下训练基于强化学习的装箱规划模型,克服现实端下训练强化学习装箱模型的弊端。
23、(2)本发明的虚拟端仿真装箱作业不同于以往仅靠数理建模仿真实现,以往的方法在长期的仿真工作中难免出现仿真与实际模型的误差产生(具体包括物料坐标位置误差、物料装箱堆叠稳定性误差、物料碰撞位移产生误差等),本发明创新性地提出虚拟端的作业仿真不仅仅基于数理建模仿真的基础上,并结合部署于现实端的视觉技术,实时获取现实端待装箱物料坐标位置信息和尺寸信息,并传送和映射于虚拟端,构建真实物理信息反馈机制,能够有效地减少或克服映射和仿真过程的误差产生。
24、(3)提出了一种同步高效的强数据交互的智能化装箱方法,实现由现实端实时映射构建的虚拟数字世界的装箱装载规划过程的可视化和数据强交互,进一步实现远端实时监测现场设备运行过程的大量状态数据信息,有效地解决了远端监测现场设备状态信息的延时问题。
技术特征:
1.一种基于数字孪生的智能装箱方法,其特征在于,包括以下步骤:
2.根据权利要求1所述的基于数字孪生的智能装箱方法,其特征在于:装箱平台机械臂模型和机械柜模型的构建采用基于三维机械设计建模工具软件实现,其构建的模型与现实模型具有一样的刚性运动和受力信息。
3.根据权利要求1所述的基于数字孪生的智能装箱方法,其特征在于:在装箱容器模型和待装箱物体模型的构建中,采集现实端待装箱物体和装箱容器的物理参数,并上传至虚拟端;虚拟端基于接收到的物理参数,采用基于动画建模工具软件构建对应的待装箱物体模型和装箱容器模型。
4.根据权利要求1所述的基于数字孪生的智能装箱方法,其特征在于:待装箱物体和装箱容器的物理参数包括尺寸信息、物体姿态信息以及由标定坐标信息转换的世界坐标信息;待装箱物体的物理参数还包括类别信息。
5.根据权利要求1所述的基于数字孪生的智能装箱方法,其特征在于:物体感知器的部署通过目标检测算法实现。
6.根据权利要求1所述的基于数字孪生的智能装箱方法,其特征在于:强化学习装箱优化过程中的状态定义为:将每个物品或每个容器看作一个状态,状态由以下的元素组成,1)物品的尺寸;2)物品已经放置的位置:3)容器的剩余空间;
7.根据权利要求6所述的基于数字孪生的智能装箱方法,其特征在于:装箱的准确率sacc的计算公式为:
8.根据权利要求6所述的基于数字孪生的智能装箱方法,其特征在于:装箱容器的空间利用率的计算公式为:
技术总结
本发明涉及一种基于数字孪生的智能装箱方法,包括:构建基于装箱场景的实时的数字孪生虚实映射仿真平台,以实现现实端至虚拟端的映射,并部署虚拟端的物体感知器;通过物体感知器识别各虚拟待装箱物体和各虚拟装箱容器的物理参数信息;基于各虚拟待装箱物体和各虚拟装箱容器的物理参数信息,通过强化学习模型进行装箱优化,并使用启发式算法来辅助强化学习模型,得到最优虚拟端装箱规划模型;通过最优虚拟端装箱规划模型指导现实端机械臂进行实时同步装箱作业。本发明采用数字孪生技术构建强虚实的装箱平台映射关系,于虚拟端实现上对强化学习的机械臂装箱规划模型的训练和优化,提高了分拣装箱的准确率和空间利用率。
技术研发人员:苏鹭梅,陈宇涵,季嘉铭,徐斌福,王泓民,林志炜,卢臻铉
受保护的技术使用者:厦门理工学院
技术研发日:
技术公布日:2024/1/15
- 还没有人留言评论。精彩留言会获得点赞!