乘性噪声环境下分布式观测器的设计方法及装置
本文件涉及计算机,尤其涉及一种乘性噪声环境下分布式观测器的设计方法。
背景技术:
1、近年来,多智能体系统一致稳定性控制问题由于其广泛的民用和军用而备受关注,其应用涉及国计民生的各个领域,如国家电网系统、移动通信网络、城市交通网络等。分布式观测器是指由多个分散在不同位置的传感器或者探测器组成的系统,通过相互协作来获取所需要的信息。这种系统广泛应用于各种领域,比如环境监测、智能交通、机器人导航等。在多智能体系统中,部分智能体能够获得领导者全部自身状态的信息,但由于部分物理量或状态往往无法直接观测或测量,因此,需要利用分布式观测器对其进行估计。然而,在系统各个智能体之间的通信也会带来噪声干扰的问题。因此,为了提高多智能体系统的稳定性及可靠性,需要在设计控制协议算法的过程中考虑噪声问题对数据传输的影响。值得注意的是,在相关的一致性控制协议的设计中都需要用到系统状态的实时信息,却忽视实际系统中存在的乘性噪声的干扰信号。乘性噪声更能反映邻居带来的信息受到环境的干扰,其强度取决于多智体系统的状态。在乘性噪声环境下,观测值会受到来自外部环境和传感器本身的噪声干扰,这种干扰会对估计结果产生很大的影响。如何在乘性噪声环境下实现均方一致性成为了一个具有挑战性的问题。均方一致性是指,多个分布式观测器在观测同一物理量或状态时,通过合理的数据处理和传输协议,使得各个观测数据在均方意义下收敛于同一值。这是保证多个观测器的观测数据具有一致性和稳定性的关键所在。因此目前亟需分布式观测器再乘性噪声环境下实现均方一致性估计的技术方案。
技术实现思路
1、本发明的目的在于提供一种乘性噪声环境下分布式观测器的设计方法及装置,旨在解决现有技术中的上述问题。
2、本发明提供一种乘性噪声环境下分布式观测器的设计方法,包括:
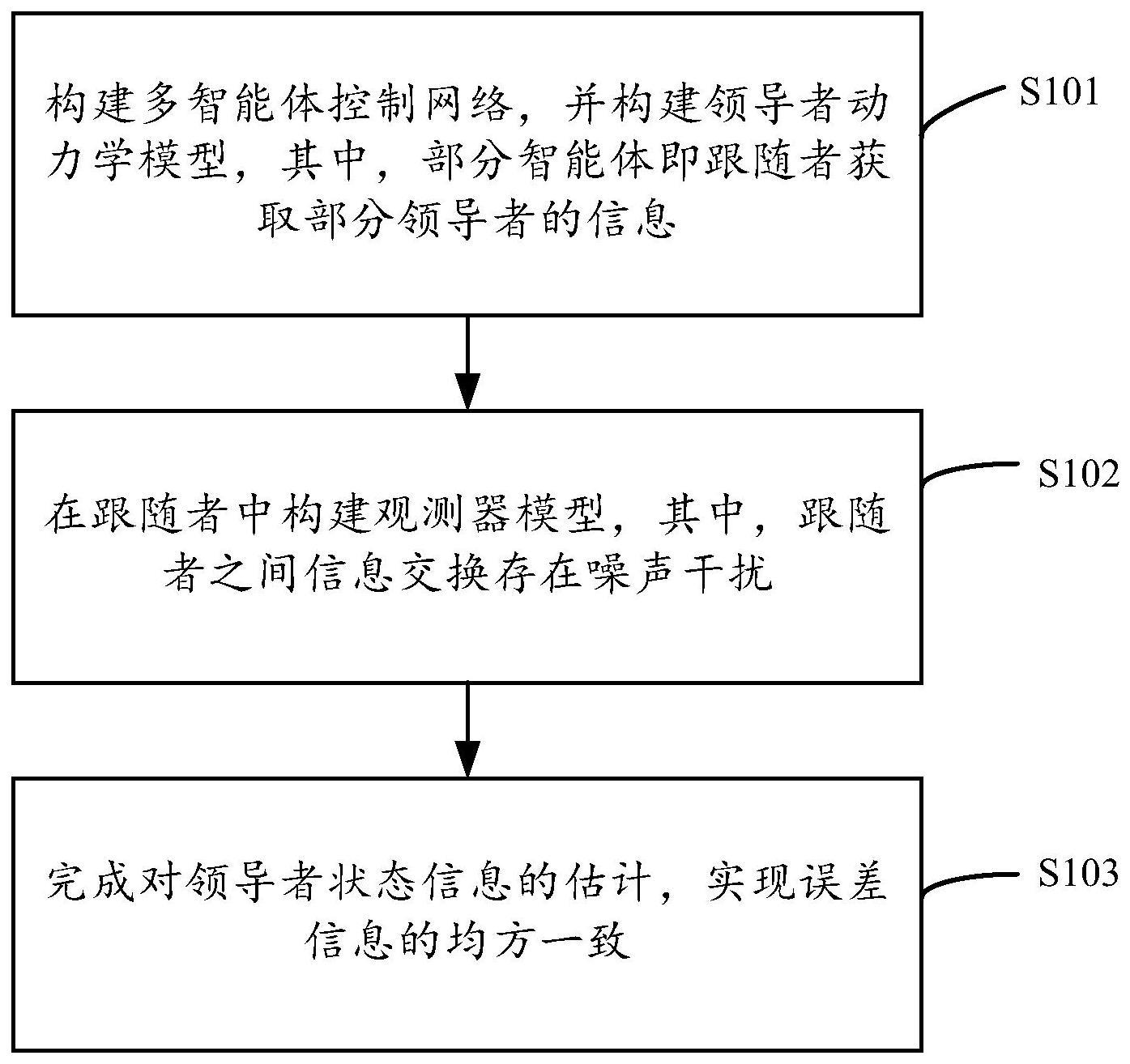
3、构建多智能体控制网络,并构建领导者动力学模型,其中,部分智能体即跟随者获取部分领导者的信息;
4、在跟随者中构建观测器模型,其中,跟随者之间信息交换存在噪声干扰;
5、完成对领导者状态信息的估计,实现误差信息的均方一致。
6、本发明提供一种乘性噪声环境下分布式观测器的设计装置,包括:
7、第一构建模块,用于构建多智能体控制网络,并构建领导者动力学模型,其中,部分智能体获取部分领导者的信息;
8、第二构建模块,用于在跟随者中构建观测器模型,其中,跟随者之间信息交换存在噪声干扰;
9、估计模块,用于完成对领导者状态信息的估计,实现误差信息的均方一致。
10、本发明实施例还提供一种电子设备,包括:存储器、处理器及存储在所述存储器上并可在所述处理器上运行的计算机程序,所述计算机程序被所述处理器执行时实现上述乘性噪声环境下分布式观测器的设计方法的步骤。
11、本发明实施例还提供一种计算机可读存储介质,所述计算机可读存储介质上存储有信息传递的实现程序,所述程序被处理器执行时实现上述乘性噪声环境下分布式观测器的设计方法的步骤。
12、采用本发明实施例,克服了现有技术在有乘性噪声的干扰的情况下,线性多智能体系统一致性的问题,实现了在乘性噪声环境下实现均方一致性估计的分布式观测器的设计方法。
技术特征:
1.一种乘性噪声环境下分布式观测器的设计方法,其特征在于,包括:
2.根据权利要求1所述的方法,其特征在于,构建多智能体控制网络,并构建领导者动力学模型具体包括:
3.根据权利要求1所述的方法,其特征在于,在跟随者中构建观测器模型具体包括:
4.根据权利要求1所述的方法,其特征在于,完成对领导者状态信息的估计,实现误差信息的均方一致。
5.一种乘性噪声环境下分布式观测器的设计装置,其特征在于,包括:
6.根据权利要求5所述的装置,其特征在于,所述第一构建模块具体用于:
7.根据权利要求5所述的装置,其特征在于,所述第二构建模块具体用于:
8.根据权利要求5所述的装置,其特征在于,所述估计模块具体用于:
9.一种电子设备,其特征在于,包括:存储器、处理器及存储在所述存储器上并可在所述处理器上运行的计算机程序,所述计算机程序被所述处理器执行时实现如权利要求1至4中任一项所述的乘性噪声环境下分布式观测器的设计方法的步骤。
10.一种计算机可读存储介质,其特征在于,所述计算机可读存储介质上存储有信息传递的实现程序,所述程序被处理器执行时实现如权利要求1至4中任一项所述的乘性噪声环境下分布式观测器的设计方法的步骤。
技术总结
本说明书实施例提供了一种乘性噪声环境下分布式观测器的设计方法及装置,其中,方法包括:构建多智能体控制网络,并构建领导者动力学模型,其中,部分智能体即跟随者获取部分领导者的信息;在跟随者中构建观测器模型,其中,跟随者之间信息交换存在噪声干扰;完成对领导者状态信息的估计,实现误差信息的均方一致。
技术研发人员:陈凯锐,刘敏怡
受保护的技术使用者:广州大学
技术研发日:
技术公布日:2024/1/15
- 还没有人留言评论。精彩留言会获得点赞!