三维数据编码方法、解码方法、编码装置、解码装置与流程
本申请涉及三维数据编码方法、三维数据解码方法、三维数据编码装置以及三维数据解码装置。
背景技术:
1、在用于汽车或机器人自主地进行工作的计算机视觉、地图信息、监视、基础结构检查、或影像分发等较大的领域中,今后将会普及灵活运用了三维数据的装置或服务。三维数据通过测距仪等距离传感器、立体摄影机、或多个单眼相机的组合等各种方法来获得。
2、作为三维数据的一个表现方法有被称作点云数据的表现方法,该方法通过三维空间内的点群来表现三维结构的形状(例如,参照非专利文献1)。在点云数据中存放了点群的位置以及颜色。虽然预想点云数据作为三维数据的表现方法将成为主流,但是,点群的数据量非常大。因此,在三维数据的蓄积或传输中与二维的动态图像(作为一个例子,有以mpeg而被标准化后的mpeg-4avc或hevc等)一样,需要通过编码来进行数据量的压缩。
3、并且,关于点云数据的压缩,有一部分由进行点云数据关联的处理的公开的程序库(point cloud library:点云库)等支持。
4、现有技术文献
5、非专利文献
6、非专利文献1:“octree-based progressive geometry coding of pointclouds”,eurographics symposium on point-based graphics(2006)
技术实现思路
1、发明所要解决的课题
2、这种三维数据与二维数据相比,数据量庞大,将要传输的三维编码数据的数据量也庞大。
3、本申请的目的在于提供一种能够减少传输时的数据量的三维数据编码方法、三维数据解码方法、三维数据编码装置或三维数据解码装置。
4、解决课题所使用的手段
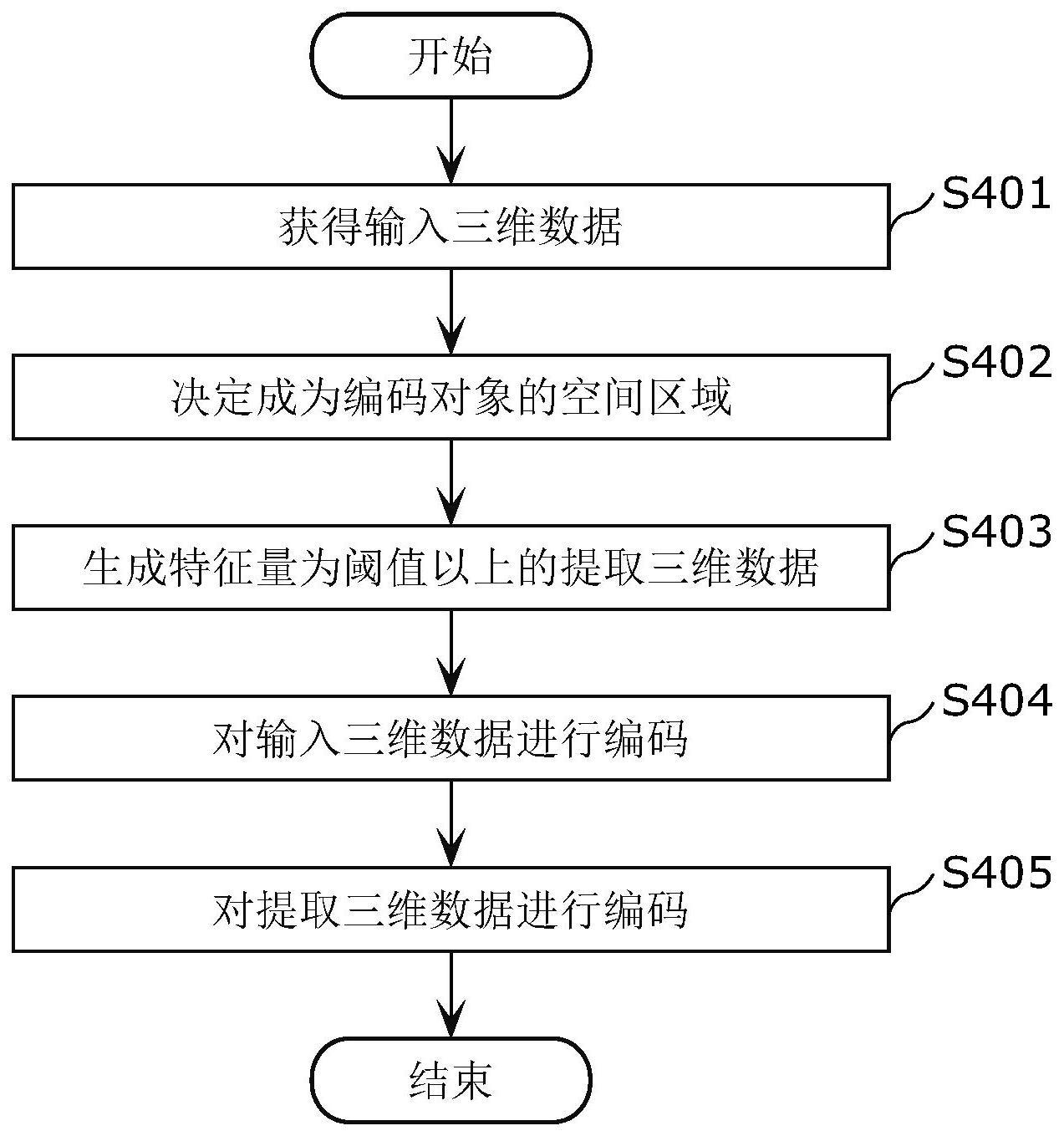
5、本申请的一个形态所涉及的三维数据编码方法包括:提取步骤,从第1三维数据提取特征量为阈值以上的第2三维数据;以及第1编码步骤,通过对所述第2三维数据进行编码,来生成第1编码三维数据。
6、本申请的一个形态所涉及的三维数据解码方法包括:第1解码步骤,以第1解码方法,对第1编码三维数据进行解码,该第1编码三维数据是通过对从第1三维数据提取的特征量为阈值以上的第2三维数据进行编码而得到的;以及第2解码步骤,以与所述第1解码方法不同的第2解码方法,对通过编码所述第1三维数据而得到的第2编码三维数据进行解码。
7、另外,这些所有的或具体的形态可以作为系统、方法、集成电路、计算机程序或计算机可读取的cd-rom等记录介质来实现,并且可以通过对系统、方法、集成电路、计算机程序以及记录介质进行组合来实现。
8、发明的效果
9、本申请能够提供一种能够减少传输时的数据量的三维数据编码方法、三维数据解码方法、三维数据编码装置、或三维数据解码装置。
技术特征:
1.一种三维数据编码方法,
2.如权利要求1所述的三维数据编码方法,
3.如权利要求1或2所述的三维数据编码方法,
4.如权利要求3所述的三维数据编码方法,
5.如权利要求3所述的三维数据编码方法,
6.如权利要求1或2所述的三维数据编码方法,
7.如权利要求1或2所述的三维数据编码方法,
8.一种三维数据解码方法,包括:
9.如权利要求8所述的三维数据解码方法,
10.如权利要求8或9所述的三维数据解码方法,
11.如权利要求10所述的三维数据解码方法,
12.如权利要求10所述的三维数据解码方法,
13.如权利要求8或9所述的三维数据解码方法,
14.如权利要求8或9所述的三维数据解码方法,
15.一种三维数据编码装置,具备:
16.一种三维数据解码装置,具备:
技术总结
一种三维数据编码方法、解码方法、编码装置、解码装置。三维数据编码方法包括:发送步骤,根据客户端的移动速度,将第1编码三维数据以及第2编码三维数据的一方发送至所述客户端,所述第1编码三维数据通过从第1三维数据提取特征量为阈值以上的第2三维数据,对所述第2三维数据进行编码,从而被生成,所述第2编码三维数据通过对所述第1三维数据进行编码从而被生成。
技术研发人员:杉尾敏康,西孝启,远间正真,松延徹,吉川哲史,小山达也
受保护的技术使用者:松下电器(美国)知识产权公司
技术研发日:
技术公布日:2024/1/14
- 还没有人留言评论。精彩留言会获得点赞!