一种实现三维牙齿模型凸起效果的方法、装置及应用与流程
本申请涉及牙科医疗领域,特别是涉及一种实现三维牙齿模型凸起效果的方法、装置及应用。
背景技术:
1、近年来,随着数码牙科技术的不断发展,牙科三维模型的生成和优化成为了一个热门的研究领域,现有的牙科三维模型通常是通过口腔扫描仪获取口腔数据来实现数字化,然后在计算机上进行后期处理,完成精确的三维模型,然而,由于牙齿模型存在很多凸起,如何在精确的三维模型中对牙齿的凸起进行优化是一个具有挑战性的问题。
2、椭圆函数是具有周期性的特殊函数,具有较好的数学性质和逼近性能,可以用来表示连续平滑可微函数,并且在处理周期性信号等方面具有很强的潜力,椭圆函数具有一些独特的性质,使其与其他特殊函数有所区别。首先,椭圆函数是双周期函数,即具有两个不同的周期。这两个周期称为椭圆函数的主要周期和次要周期。其次,椭圆函数是亚纯函数,也就是说,在某些点上可能有极点,但在其他点上是解析的,椭圆函数的研究领域非常广泛,涉及到复变函数论、代数几何、数论等多个数学分支。它们在物理学中的应用也非常广泛,如在振动问题、非线性波动方程、量子场论等领域中都有应用。
3、传统的对牙齿凸起进行优化的方法包括多项式拟合、bezier曲线拟合等,但是这些方法存在着提取轮廓形状不准确,难以精细调整凸起形态等问题,所以如何对三维牙齿模型进行的凸起进行准确、稳定和丰富的优化是亟需解决的问题。
技术实现思路
1、本申请实施例提供了一种实现三维牙齿模型凸起效果的方法、装置及应用,可以根据三维牙齿模型的点云数据来构建kd-tree结构,根据kd-tree结构来获取凸起点云数据,再根据凸起点云数中据的多种信息来构建椭圆函数从而实现三维牙齿模型凸起效果。
2、第一方面,本申请实施例提供了一种实现三维牙齿模型凸起效果的方法,所述方法包括:
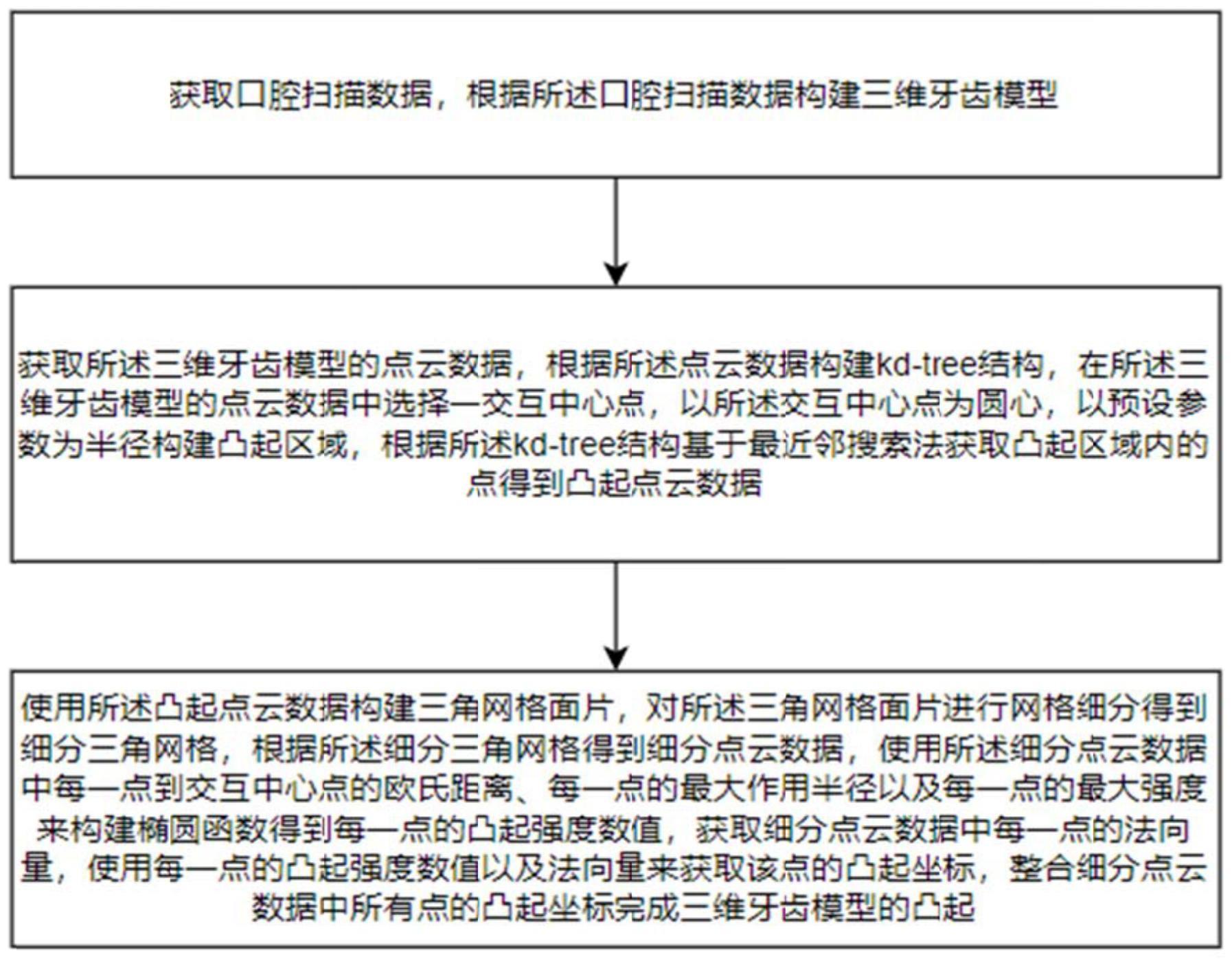
3、获取口腔扫描数据,根据所述口腔扫描数据构建三维牙齿模型;
4、获取所述三维牙齿模型的点云数据,根据所述点云数据构建kd-tree结构,在所述三维牙齿模型的点云数据中选择一交互中心点,以所述交互中心点为圆心,以预设参数为半径构建凸起区域,根据所述kd-tree结构基于最近邻搜索法获取凸起区域内的点得到凸起点云数据;
5、使用所述凸起点云数据构建三角网格面片,对所述三角网格面片进行网格细分得到细分三角网格,根据所述细分三角网格得到细分点云数据,使用所述细分点云数据中每一点到交互中心点的欧氏距离、每一点的最大作用半径以及每一点的最大强度来构建椭圆函数得到每一点的凸起强度数值,获取细分点云数据中每一点的法向量,使用每一点的凸起强度数值以及法向量来获取该点的凸起坐标,整合细分点云数据中所有点的凸起坐标完成三维牙齿模型的凸起。
6、第二方面,本申请实施例提供了一种实现三维牙齿模型凸起效果的装置,包括:
7、获取模块:获取口腔扫描数据,根据所述口腔扫描数据构建三维牙齿模型;
8、构建模块:获取所述三维牙齿模型的点云数据,根据所述点云数据构建kd-tree结构,在所述三维牙齿模型的点云数据中选择一交互中心点,以所述交互中心点为圆心,以预设参数为半径构建凸起区域,根据所述kd-tree结构基于最近邻搜索法获取凸起区域内的点得到凸起点云数据;
9、凸起模块:使用所述凸起点云数据构建三角网格面片,对所述三角网格面片进行网格细分得到细分三角网格,根据所述细分三角网格得到细分点云数据,使用所述细分点云数据中每一点到交互中心点的欧氏距离、每一点的最大作用半径以及每一点的最大强度来构建椭圆函数得到每一点的凸起强度数值,获取细分点云数据中每一点的法向量,使用每一点的凸起强度数值以及法向量来获取该点的凸起坐标,整合细分点云数据中所有点的凸起坐标完成三维牙齿模型的凸起。
10、第三方面,本申请实施例提供了一种电子装置,包括存储器和处理器,所述存储器中存储有计算机程序,所述处理器被设置为运行所述计算机程序以执行一种实现三维牙齿模型凸起效果的方法。
11、第四方面,本申请实施例提供了一种可读存储介质,所述可读存储介质中存储有计算机程序,所述计算机程序包括用于控制过程以执行过程的程序代码,所述过程包括一种实现三维牙齿模型凸起效果的方法。
12、本发明的主要贡献和创新点如下:
13、本申请实施例根据三维牙齿模型的点云数据来构建kd-tree结构,通过设定交互中心点以及预设参数获取凸起区域的圆形拓扑结构,基于最近邻搜索法选定圆形拓扑结构内的点云数据,通过上述递归构建kd-tree结构的方式可以根据点云数据的空间分布建立了起层次结构,并提供高效的最近邻点搜索和空间查询能力;本方案通过设计一种三角网格的细分方法来对满足不同条件的三角网格进行细分,可以最大程度的保留点云数据中的凸起部分;本方案通过基于椭圆函数的拟合方法来提高轮廓提取的准确性,并且通过对椭圆函数的参数进行不断调整可以精细的调整凸起形态;本方案通过拓扑结构获取每一点的多种信息,并通过这些信息来构建椭圆函数,从而更新凸起点位的坐标,更加直观的体现出了三维牙齿模型的凸起效果。
14、本申请的一个或多个实施例的细节在以下附图和描述中提出,以使本申请的其他特征、目的和优点更加简明易懂。
技术特征:
1.一种实现三维牙齿模型凸起效果的方法,其特征在于,包括以下步骤:
2.根据权利要求1所述的一种实现三维牙齿模型凸起效果的方法,其特征在于,所述凸起区域为一个圆形拓扑结构。
3.根据权利要求1所述的一种实现三维牙齿模型凸起效果的方法,其特征在于,在“获取所述三维牙齿模型的点云数据,根据所述点云数据构建kd-tree结构”步骤中,所述kd-tree结构中的每一个节点代表一个超矩形区域,所述超矩形区域中包含点云数据中的至少一个点,对所述超矩形区域进行递归分割建立子区域,直至分割出的每一子区域中仅包含点云数据中的一个点完成kd-tree结构的构建。
4.根据权利要求2所述的一种实现三维牙齿模型凸起效果的方法,其特征在于,在“根据所述kd-tree结构基于最近邻搜索法获取凸起区域内的点得到凸起点云数据”步骤中,从kd-tree的根节点开始,递归地执行以下步骤:如果当前节点为空,则返回,结束该分支的搜索,如果当前节点表示的数据点在凸起区域内,将该数据点添加到结果列表中,所述结果列表用于存储凸起区域内的点,根据当前节点所在的切分维度,比较圆心与当前节点的切分值,获取当前节点的切分维度,若在该切分维度下当前节点的切分值大于凸起区域与该切分维度的距离,则进入当前节点的左子树,若在该切分维度下当前节点的切分值小于等于凸起区域与该切分维度的距离,则进入当前节点的右子树递归完成后,最终得到的结果列表中的点即为凸起点云数据。
5.根据权利要求1所述的一种实现三维牙齿模型凸起效果的方法,其特征在于,在“对所述三角网格面片进行网格细分得到细分三角网格,根据所述细分三角网格得到细分点云数据”步骤中,若任一三角网格面片的面积大于设定面积,则取该三角网格面片三条边的中点进行连线来对该三角网格面片进行细分,若任一三角网格面片仅存在其中一条边长大于设定边长且面积小于设定面积,则取该边的中点向该边的对角进行连线来对该三角网格面片进行细分,若任一三角网格面片的其中两条边长大于设定边长且面积小于设定面积,则取这两条边的中点进行连线,并取这两条边中任意一条边的中点向该边的对角进行连线来对该三角网格面片进行细分。
6.根据权利要求1所述的一种实现三维牙齿模型凸起效果的方法,其特征在于,在“使用所述细分点云数据中每一点到交互中心点的欧氏距离、每一点的最大作用半径以及每一点的最大强度来构建椭圆函数得到每一点的凸起强度数值”步骤中,计算每一点的凸起强度数值的公式为:其中strength为每一点的凸起强度数值,distance为细分点云数据中每一点到交互中心点的欧氏距离,maxdistance为每一点的最大作用半径,maxstrength为每一点的最大强度。
7.根据权利要求1所述的一种实现三维牙齿模型凸起效果的方法,其特征在于,在“获取细分点云数据中每一点的法向量,使用每一点的凸起强度数值以及法向量来获取该点的凸起坐标”步骤中,对所述细分点云数据中所有点的法向量进行归一化后与每一点的凸起强度数值相乘得到坐标修正值,使用所述坐标修正值与所述细分点云数据中对应点的坐标值进行相加得到该点的凸起坐标,若存在一点的法向量与视角方向的夹角大于设定角度,则对该点的法向量取反后进行计算。
8.一种实现三维牙齿模型凸起效果的装置,其特征在于,包括:
9.一种电子装置,包括存储器和处理器,其特征在于,所述存储器中存储有计算机程序,所述处理器被设置为运行所述计算机程序以执行权利要求1-7任一所述的一种实现三维牙齿模型凸起效果的方法。
10.一种可读存储介质,其特征在于,所述可读存储介质中存储有计算机程序,所述计算机程序包括用于控制过程以执行过程的程序代码,所述过程包括权利要求1-7任一所述的一种实现三维牙齿模型凸起效果的方法。
技术总结
本申请提出了一种实现三维牙齿模型凸起效果的方法、装置及应用,包括以下步骤:使用口腔扫描数据构建三维牙齿模型,并提取点云数据;通过构建kd‑tree结构,基于最近邻搜索法获取凸起点云数据;利用凸起点云数据构建三角网格面片,并进行网格细分,得到细分三角网格;利用细分点云数据的欧氏距离、作用半径和强度构建椭圆函数,获取每个点的凸起强度数值和法向量,并计算凸起坐标;整合所有点的凸起坐标,完成三维牙齿模型的凸起。本方案先通过构建二叉树来获取凸起点云数据,再根据凸起点云数据中的各种信息来构建椭圆函数的公式来实现三维牙齿模型的凸起。
技术研发人员:蔡林凯
受保护的技术使用者:杭州雅智医疗技术有限公司
技术研发日:
技术公布日:2024/1/16
- 还没有人留言评论。精彩留言会获得点赞!