一种水面船声学导航传感器总体优化布置设计方法与流程
本发明涉及水面船声学导航传感器总体布置设计,具体涉及一种基于数值仿真和试验的声学导航传感器总体优化布置设计方法。
背景技术:
1、为保障航行安全等,水面船普遍配置了回声测深仪和声学多普勒计程仪等声学导航设备。上述声学导航传感器(换能器)工作时均需向水下发射并接收从海底或水层反射/散射的声波,该声波传播过程能否顺利完成与船底部相关区域水流场等环境密切相关。与水面电磁场等不同,船底水流场环境是水面船平台与海流相互作用的结果,受舰艇平台运动速度、机动、装载情况和流速、流向等多种因素影响。如某型船曾出现高航速条件下测深仪测深和声学多普勒计程仪测速均异常的情况。经分析,除声学导航传感器自身需进一步提升环境适应能力外,在不改变船底结构等前提下,通过选择典型航态下受气泡等流场环境影响小的布置位置也是保障声学导航传感器正常工作的有效方式。
2、目前国内针对水面船声学导航传感器的总体布置研究基本空白,总体主要依据相关规范中“换能器应安装在船的底部,靠近船体中线的部位”和“换能器应安装在远离舰艏、机舱和螺旋桨,受气泡和震动影响较小处;优选位置在距舰艏1/3~1/4船长处”等定性要求开展布置设计工作。该设计依据定性模糊,尺度难以掌握,且在某些条件下部分要求与实际测量结果相悖。因此,有必要在典型航态下船平台船底流场分布研究基础上,形成指导声学导航传感器优化布置设计的方法和判据,为水面船声学导航传感器的总体优化布置设计工作提供参考。
技术实现思路
1、本发明要解决的技术问题在于针对目前水面船声学导航传感器总体设计依据和技术手段有限,同时船舶安全航行等对测深和测速等水声导航信息可用性要求逐渐升高的问题,提供一种水面船声学导航传感器总体优化布置设计方法,可用于指导水面船声学导航传感器的总体优化布置设计工作。
2、本发明为解决上述提出的技术问题所采用的技术方案为:
3、一种水面船声学导航传感器总体优化布置设计方法,包括以下步骤:
4、s1、建模及数值模拟区域选择:
5、采用有限元软件建立裸船体三维几何模型;数值模拟区域尺寸为横向为1倍船长,垂向为1倍船长;纵向总长度为5倍的船长:来流边界距船艏为1倍船长,出流边界距船艉3倍船长;并对模型进行结构化—非结构化混合网格进行划分;
6、s2、典型航态船底流场仿真及布置区选择:
7、针对空化和船艏方向来流气泡这类可能产生气泡覆盖船底流场变化的场景,分别开展典型航态下空化泡分布仿真、游离气泡船底流动分布仿真,进一步缩小传感器布置范围;
8、s3、船底重点部位噪声测量试验及布置方案选择,包括:
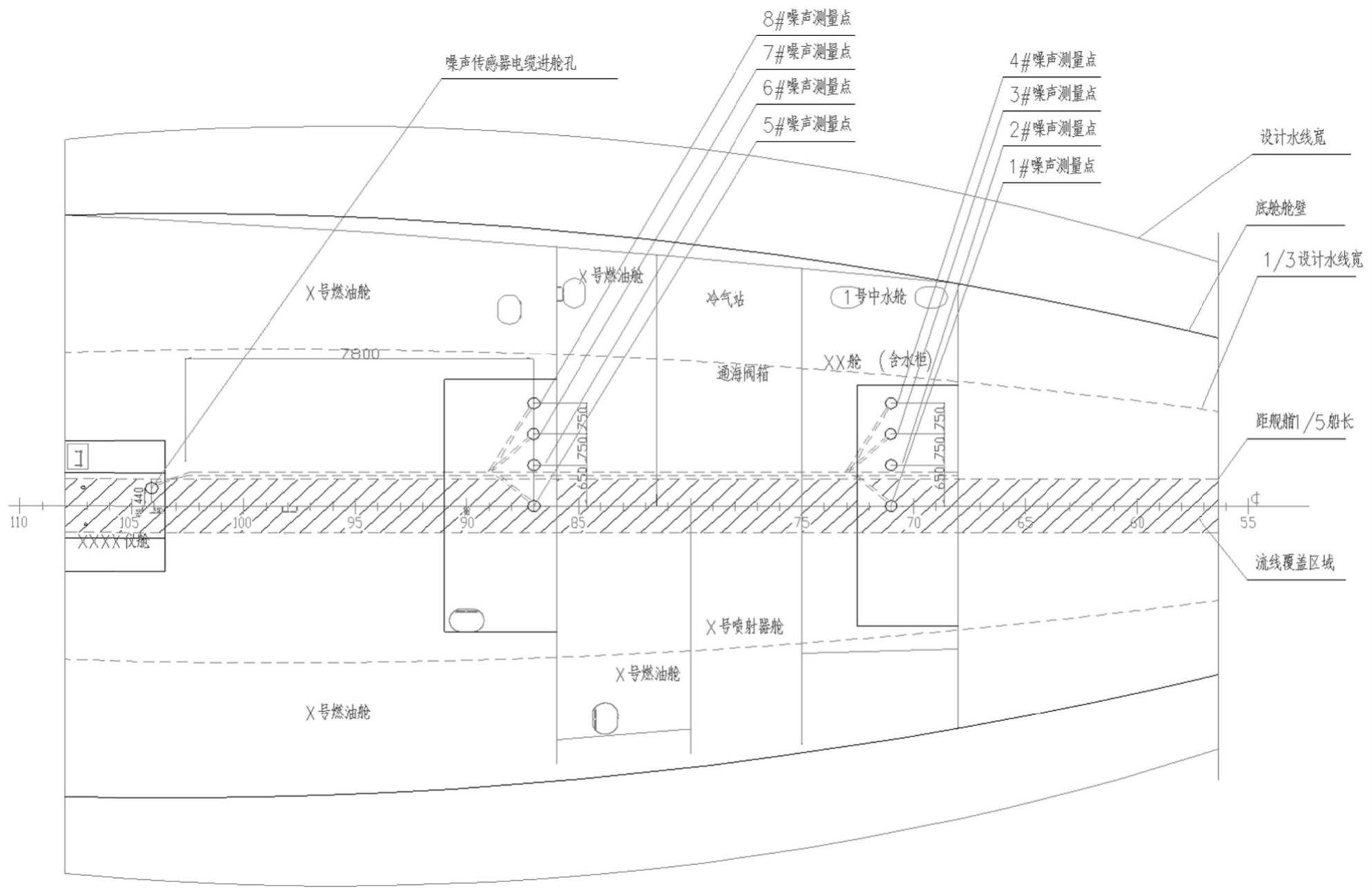
9、s3.1、船底噪声传感器布置位置选择:在仿真初步确定的可布置区域内,考虑“声学传感器应远离机舱和螺旋桨等振动源”和本船允许最高海况下横摇对船底适装区域影响,选择纵向由船舶摇心至距船艏1/5船长、横向距中线面1/3设计水线宽的船底区域作为噪声传感器优选布置区域;在噪声传感器优选布置区域内,考虑具备安装声学导航传感器条件下,按纵向对齐、横向间隔500mm~1000mm为一组,布置噪声传感器;
10、s3.2、噪声测量试验验证:选择符合要求的噪声传感器固定至s3.1中确定的船底相关部位;经实船典型航态验证测得背景噪声正常、回波清晰可见的部位即为声学导航传感器可能正常工作的部位;
11、s3.3、声学导航传感器布置方案选择原则:从s3.2确定的适合布置声学导航传感器的部位中,按尽量靠近船舶摇心位置作为声学导航传感器优选布置方案。
12、上述方案中,s1中,所述横向为y轴方向,表示距船中的距离;所述垂向为z轴方向,表示距水线面的距离;所述纵向为x轴方向,沿船长方向;模型的坐标原点选在船中横剖面、中纵剖面及设计水线面的交点。
13、上述方案中,s2中,空化泡分布仿真及布置区选择判据:选用标准k-εmodel湍流模型,模拟直线航行时船体底部区域流场压力场分布;选取各典型航态下正压且压力分布均匀的区域作为目标布置区域。
14、上述方案中,s2中,游离气泡船底流动分布仿真及布置区选择判据:考虑贴近船体的微小气泡跟随性较好,运动轨迹接近船底表面流线,开展静水直航状态下的流线数值模拟,用于模拟船艏方向来流气泡及分布情况;优先选取各典型航态下艏部来流流线未覆盖的区域作为目标布置区域。
15、上述方案中,s3.1中,具备安装声学导航传感器条件,包括舱内为干舱、空间足够;船底外板可开口、周围无海底阀。
16、上述方案中,s3.1中,针对左右对称的水面船,声学导航传感器仅布置一舷即可。
17、上述方案中,s3.1中,可根据需要按纵向间隔最小2.5m,布置多组噪声传感器。
18、上述方案中,s3.2中,符合要求的测噪传感器要求频率不低于声学导航传感器工作频率、体积小、外形光顺。
19、上述方案中,s3.2中,采用高分子粘接剂将传感器和电缆固定至船底相关部位,要求包括电缆在内的安装附件不影响测噪传感器周围流场。
20、上述方案中,所述典型航态包括巡航和最高航速。
21、本发明的有益效果在于:
22、本发明基于数值仿真和试验的声学导航传感器总体设计方法,可用于指导声学导航传感器的总体布置优化设计。该方法已经应用于某型船声学导航传感器总体优化布置设计,经实践检验,方法简便可行,解决了某船声学导航设备高速下工作异常问题,可满足声学导航传感器总体设计要求。
技术特征:
1.一种水面船声学导航传感器总体优化布置设计方法,其特征在于,包括以下步骤:
2.根据权利要求1所述的水面船声学导航传感器总体优化布置设计方法,其特征在于,s1中,所述横向为y轴方向,表示距船中的距离;所述垂向为z轴方向,表示距水线面的距离;所述纵向为x轴方向,沿船长方向;模型的坐标原点选在船中横剖面、中纵剖面及设计水线面的交点。
3.根据权利要求1所述的水面船声学导航传感器总体优化布置设计方法,其特征在于,s2中,空化泡分布仿真及布置区选择判据:选用标准k-εmodel湍流模型,模拟直线航行时船体底部区域流场压力场分布;选取各典型航态下正压且压力分布均匀的区域作为目标布置区域。
4.根据权利要求1所述的水面船声学导航传感器总体优化布置设计方法,其特征在于,s2中,游离气泡船底流动分布仿真及布置区选择判据:考虑贴近船体的微小气泡跟随性较好,运动轨迹接近船底表面流线,开展静水直航状态下的流线数值模拟,用于模拟船艏方向来流气泡及分布情况;优先选取各典型航态下艏部来流流线未覆盖的区域作为目标布置区域。
5.根据权利要求1所述的水面船声学导航传感器总体优化布置设计方法,其特征在于,s3.1中,具备安装声学导航传感器条件,包括舱内为干舱、空间足够;船底外板可开口、周围无海底阀。
6.根据权利要求1所述的水面船声学导航传感器总体优化布置设计方法,其特征在于,s3.1中,针对左右对称的水面船,声学导航传感器仅布置一舷即可。
7.根据权利要求1所述的水面船声学导航传感器总体优化布置设计方法,其特征在于,s3.1中,可根据需要按纵向间隔最小2.5m,布置多组噪声传感器。
8.根据权利要求1所述的水面船声学导航传感器总体优化布置设计方法,其特征在于,s3.2中,符合要求的测噪传感器要求频率不低于声学导航传感器工作频率、体积小、外形光顺。
9.根据权利要求1所述的水面船声学导航传感器总体优化布置设计方法,其特征在于,s3.2中,采用高分子粘接剂将传感器和电缆固定至船底相关部位,要求包括电缆在内的安装附件不影响测噪传感器周围流场。
10.根据权利要求1所述的水面船声学导航传感器总体优化布置设计方法,其特征在于,所述典型航态包括巡航和最高航速。
技术总结
本发明涉及一种水面船声学导航传感器总体优化布置设计方法,包括S1、建模及数值模拟区域选择;S2、典型航态船底流场仿真及布置区选择:分别开展典型航态下空化泡分布仿真、游离气泡船底流动分布仿真,进一步缩小传感器布置范围;S3、船底重点部位噪声测量试验及布置方案选择:S3.1、选择纵向由船舶摇心至距船艏1/5船长、横向距中线面1/3设计水线宽的船底区域作为噪声传感器优选布置区域;S3.2、经实船典型航态验证测得背景噪声正常、回波清晰可见的部位即为声学导航传感器可能正常工作的部位;S3.3、从确定的适合布置声学导航传感器的部位中,按尽量靠近船舶摇心位置作为声学导航传感器优选布置方案。本发明可用于指导声学导航传感器的总体布置优化设计。
技术研发人员:闻宏志,徐峰,邹存伟,郭航航,赵美珍
受保护的技术使用者:中国舰船研究设计中心
技术研发日:
技术公布日:2024/1/15
- 还没有人留言评论。精彩留言会获得点赞!