线激光相机平行扫描点云拼接方法与流程
本发明涉及3d点云测量,具体涉及一种线激光相机平行扫描点云拼接方法。
背景技术:
1、线激光相机是一种快速发展的非接触式测量装置,具有灵活性好、速度快、精度高以及智能化等优点,在逆向工程和复杂曲面零部件等测量领域有着广泛应用。线激光相机分辨率非常高,适用于高精度检测测量,同时还能够进行需要连续运动物体成像的应用,并且可以进行微米级的测量。线激光相机在实际使用中,对于运动平台的要求很高,线激光相机固定在运动平台之上,待测物体固定在高精度运动平台中匀速运动。线激光相机成像是运动平台移动方向y与激光平面xoz形成的点云。通常情况下,激光平面xoz与运动平台运动方向y不是完全垂直的,这会引起点云的畸变。
2、受检测范围与检测精度限制,在一些工业应用场景下,单个线激光相机无法完整拍摄待测物体。若待测物体实际长度为a,线激光相机生成点云长度为b,当a大于等于b时,生成的点云就不是完整的待测物体。为了满足不同的拍摄场景以完整拍摄待测物体,通常需要设置多个线激光相机拍摄待测物体来进行点云拼接,但是,通过多个线激光相机拍摄待测物体,操作麻烦,且仍旧存在因运动平台受限或无法使用多个线激光相机的情况,导致无法拍摄到完整待测物体。因此,需要设计一种操作简单,并且使用单个线激光相机的点云拼接方法。
技术实现思路
1、本发明的目的是提出一种线激光相机平行扫描点云拼接方法,以解决现有技术中单个线激光相机因扫描范围限制无法扫描整个待测物体点云而导致无法对待测物体进行整体分析的的问题。
2、为达到上述发明目的,本发明采用的技术方案是:
3、一种线激光相机平行扫描点云拼接方法,包括以下步骤:
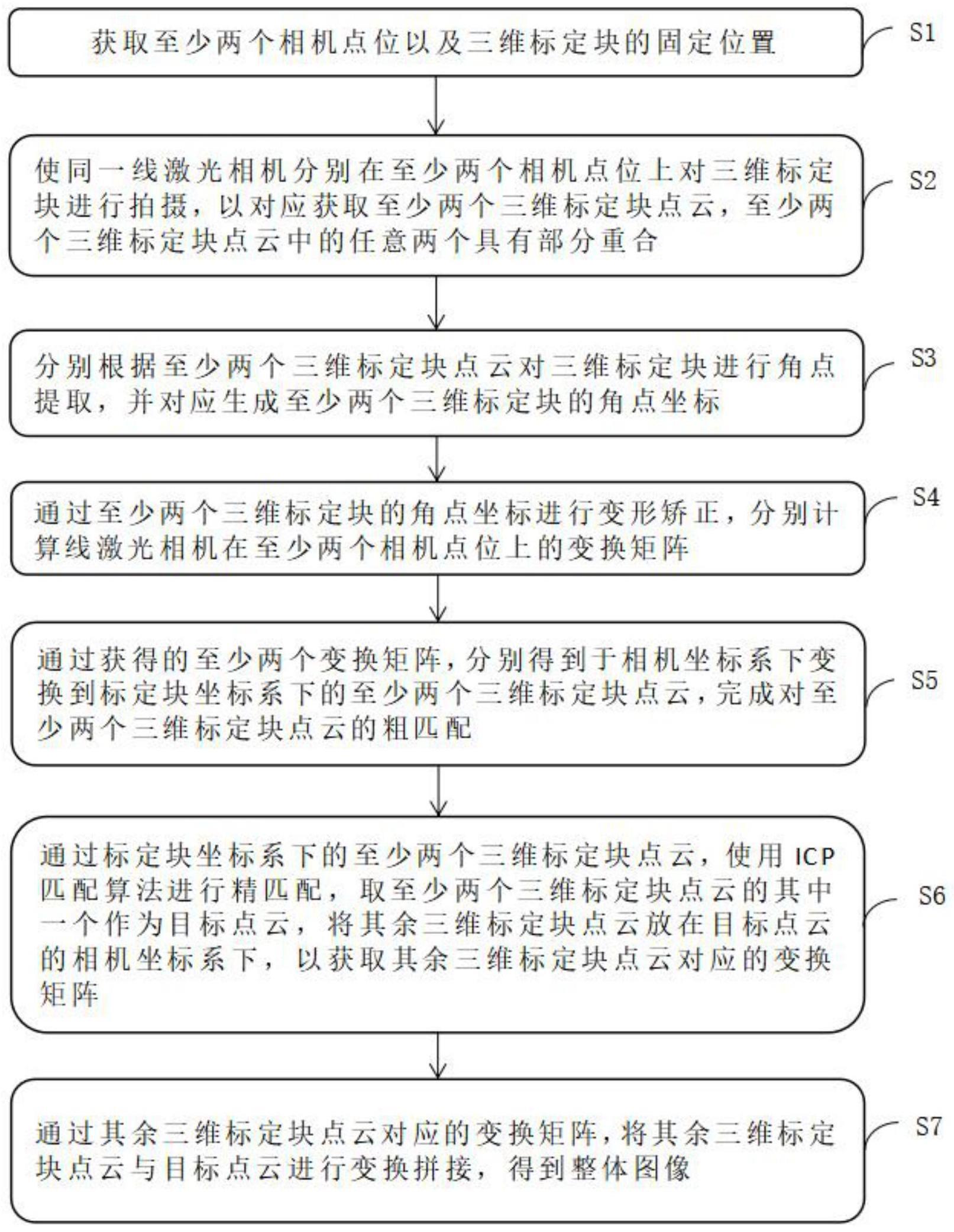
4、步骤s1:获取至少两个相机点位以及三维标定块的固定位置;
5、步骤s2:使同一线激光相机分别在至少两个相机点位上对三维标定块进行拍摄,以对应获取至少两个三维标定块点云,至少两个三维标定块点云中的任意两个具有部分重合;
6、步骤s3:分别根据至少两个三维标定块点云对三维标定块进行角点提取,并对应生成至少两个三维标定块的角点坐标;
7、步骤s4:通过至少两个三维标定块的角点坐标进行变形矫正,分别计算线激光相机在至少两个相机点位上的变换矩阵;
8、步骤s5:通过步骤s4获得的至少两个变换矩阵,分别得到于相机坐标系下变换到标定块坐标系下的至少两个三维标定块点云,完成对至少两个三维标定块点云的粗匹配;
9、步骤s6:通过所述标定块坐标系下的至少两个三维标定块点云,使用icp匹配算法进行精匹配,取至少两个三维标定块点云的其中一个作为目标点云,将其余三维标定块点云放在目标点云的相机坐标系下,以获取其余三维标定块点云对应的变换矩阵;
10、步骤s7:通过其余三维标定块点云对应的变换矩阵,将其余三维标定块点云与目标点云进行变换拼接,得到整体图像。
11、进一步地,所述获取至少两个相机点位,具体为:
12、根据待测产品,选取并调整线激光相机的相机点位,以使待测产品可被位于不同相机点位上的线激光相机捕捉,且线激光相机于不同相机点位捕捉到的待测产品的图像中,任意两个图像具有部分重合。
13、进一步地,所述线激光相机安装在移动平台上,所述移动平台被配置为可于至少两个所述相机点位之间平移,并可将所述线激光相机固定在任一所述相机点位上。
14、进一步地,所述使同一线激光相机分别在至少两个相机点位上对三维标定块进行拍摄,以对应获取至少两个三维标定块点云的方法如下:
15、至少两个相机点位记为a1、a2,…ai,其中i为大于等于2的整数,通过所述移动平台将线激光相机平行移动到相机点位a1拍摄三维标定块点云,记为b1,然后通过所述移动平台将线激光相机平行移动到相机点位a2拍摄三维标定块点云,记为b2,…通过所述移动平台将线激光相机平行移动到相机点位ai拍摄三维标定块点云,记为bi。
16、进一步地,所述三维标定块为金字塔形三维标定块,所述三维标定块包括若干呈矩阵式排列的棱台。
17、进一步地,所述分别根据至少两个三维标定块点云对三维标定块进行角点提取时,对每个所述棱台的角点进行提取。
18、进一步地,所述金字塔形三维标定块包括六个棱台,六个所述棱台呈二乘三矩阵式排列,每个所述棱台包括1个顶面、1个底面与4个侧面。
19、进一步地,所述顶面与所述底面的尺寸不同,且所述顶面的尺寸小于所述底面的尺寸,4个所述侧面的尺寸相同。
20、由于上述技术方案运用,本发明与现有技术相比具有下列优点:
21、1.本发明的线激光相机平行扫描点云拼接方法,通过单个线激光相机在不同相机点位对标定块进行拍摄标定块点云图,并将不同相机点位对应获取的标定块点云图进行拼接,以获取完整的点云图像,整体拼接流程简单,且操作方便;
22、2.本发明的线激光相机平行扫描点云拼接方法,获取的三维标定块点云采用非线性优化方法变换到标定块坐标系粗匹配后,再采用icp配准算法进行精匹配,拼接精度高。
技术特征:
1.一种线激光相机平行扫描点云拼接方法,其特征在于,包括以下步骤:
2.如权利要求1所述的线激光相机平行扫描点云拼接方法,其特征在于,所述获取至少两个相机点位,具体为:
3.如权利要求2所述的线激光相机平行扫描点云拼接方法,其特征在于,所述线激光相机安装在移动平台上,所述移动平台被配置为可于至少两个所述相机点位之间平移,并可将所述线激光相机固定在任一所述相机点位上。
4.如权利要求3所述的线激光相机平行扫描点云拼接方法,其特征在于,所述使同一线激光相机分别在至少两个相机点位上对三维标定块进行拍摄,以对应获取至少两个三维标定块点云的方法如下:
5.如权利要求1所述的线激光相机平行扫描点云拼接方法,其特征在于,所述三维标定块为金字塔形三维标定块,所述三维标定块包括若干呈矩阵式排列的棱台。
6.如权利要求5所述的线激光相机平行扫描点云拼接方法,其特征在于,所述分别根据至少两个三维标定块点云对三维标定块进行角点提取时,对每个所述棱台的角点进行提取。
7.如权利要求5所述的线激光相机平行扫描点云拼接方法,其特征在于,所述金字塔形三维标定块包括六个棱台,六个所述棱台呈二乘三矩阵式排列,每个所述棱台包括1个顶面、1个底面与4个侧面。
8.如权利要求7所述的线激光相机平行扫描点云拼接方法,其特征在于,所述顶面与所述底面的尺寸不同,且所述顶面的尺寸小于所述底面的尺寸,4个所述侧面的尺寸相同。
技术总结
本申请公开线激光相机平行扫描点云拼接方法包括:获取至少两个相机点位以及三维标定块的固定位置;线激光相机分别在至少两个相机点位上获取至少两个三维标定块点云;对三维标定块进行角点提取;进行变形矫正,分别计算线激光相机在至少两个相机点位上的变换矩阵;得到于相机坐标系下变换到标定块坐标系下的至少两个三维标定块点云,完成对三维标定块点云的粗匹配;通过标定块坐标系下的至少两个三维标定块点云,使用ICP匹配算法进行精匹配,取其中一个三维标定块点云作为目标点云,其余点云放在目标点云的相机坐标系下,以获取对应的变换矩阵;将其余三维标定块点云与目标点云进行变换拼接,得到整体图像。本申请的拼接流程简单,拼接精度高。
技术研发人员:何嘉懿
受保护的技术使用者:苏州中科行智智能科技有限公司
技术研发日:
技术公布日:2024/1/15
- 还没有人留言评论。精彩留言会获得点赞!