焊接图像特征提取方法和自动焊接机
本发明涉及相机摄取图像的畸变矫正和图像特征提取,尤其涉及一种焊接图像特征提取方法和自动焊接机。
背景技术:
1、随着自动焊接机的普遍应用,一些焊接工作正在变得更加自动化和高效。目前的自动焊接机,其自动焊接过程通常是基于机器视觉技术来实现的。具体来说,现有的自动焊接机上设置有用于摄取焊接图像的相机,而且,自动焊接机还配置有纠偏系统。在自动焊接机对焊件进行自动焊接时,相机实时地对焊道进行图像摄取,从而获取焊接图像,然后纠偏系统依据焊接图像中焊枪与焊缝之间的相对位置来调整焊枪,使其能够始终沿着焊缝中心移动。
2、目前的问题在于三个方面:
3、第一方面,由于相机本身存在视场畸变,在焊接领域内,对于相机本身的视场畸变是忽略的,这就造成获取的图像有一定的畸变。
4、第二方面,由于受焊接环境和焊件的坡口窄且深特点的影响,获取到的图像存在大量干扰。
5、第三方面,目前对于图像处理的算法没有考虑图像提取的精细化,从而导致算法处理上时效性弱,不能准确快速的识别焊接图像有效特征。
6、上述的三方面因素均不利于准确识别焊缝与焊枪之间的位置偏差。
技术实现思路
1、本发明的目的之一在于提供一种焊接图像特征提取方法,该焊接图像特征提取方法能准确快速识别确定焊缝中心和焊枪中心。
2、本发明的目的之二在于提供一种自动焊接机,该自动焊接机能够依据上述焊接图像特征提取方法所确定的焊缝中心和焊枪中心来实施纠偏动作。
3、为了实现上述技术目的,本发明采用如下技术方案:
4、一种焊接图像特征提取方法,包括:
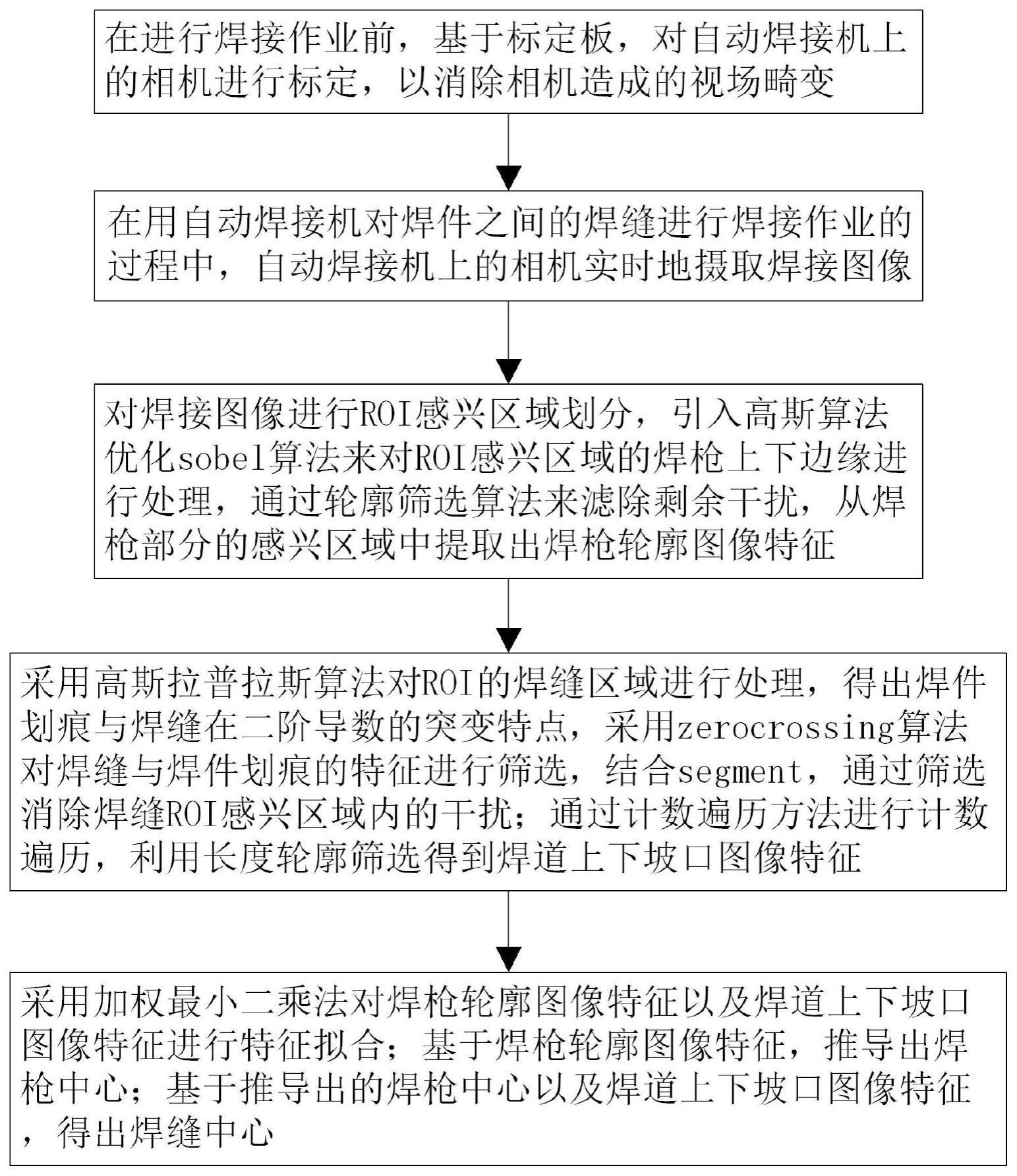
5、基于标定板,对自动焊接机上的相机进行标定;
6、在用自动焊接机进行焊接作业的过程中,相机实时地摄取焊接图像;
7、对焊接图像提取出焊枪轮廓图像特征;
8、对焊接图像提取出焊道上下坡口图像特征;
9、基于焊枪轮廓图像特征和焊道上下坡口图像特征,得出焊枪中心和焊缝中心。
10、进一步地,所述对自动焊接机上的相机进行标定,其具体实现的方法包括:
11、预先准备标定板,使相机摄取各种姿态的标定板图像;
12、在所有摄取的标定板图像中进行标定,当成功识别30张摄取的标定板图像时,生成纠正视场畸变矩阵;
13、基于所成功识别的30张标定板图像,采用具有标定功能的机器视觉软件来对相机进行标定。
14、进一步地,所述对焊接图像提取出焊枪轮廓图像特征,其具体实现的方法包括:
15、对焊接图像进行roi感兴区域划分,roi感兴区域分为焊枪上下边缘和焊道,引入高斯算法优化sobel算法来对roi感兴区域的焊枪上下边缘进行处理,通过轮廓筛选算法来滤除剩余干扰,从焊枪部分的感兴区域中提取出焊枪轮廓图像特征。
16、进一步地,所述对焊接图像提取出焊道上下坡口图像特征,其具体实现的方法包括:
17、采用高斯拉普拉斯算法对roi的焊缝区域进行处理,得出焊件划痕与焊缝在二阶导数的突变特点,采用zero-crossing算法对焊接图像中的焊缝与焊件划痕的特征进行筛选,并且,结合segment轮廓分割和筛选,通过筛选消除焊缝roi感兴区域内的干扰;通过计数遍历方法对剩余特征线条进行计数遍历,利用长度轮廓筛选得到roi感兴区域的焊道上下坡口图像特征。
18、进一步地,所述基于焊枪轮廓图像特征和焊道上下坡口图像特征,得出焊枪中心和焊缝中心,其具体实现的方法包括:
19、采用加权最小二乘法对焊枪轮廓图像特征以及焊道上下坡口图像特征进行特征拟合;
20、基于焊枪轮廓图像特征,采用几何推理方法来推导出焊枪中心;
21、基于推导出的焊枪中心以及焊道上下坡口图像特征,依据焊道上下坡口对焊枪中心的增量来求取平均值,从而得出焊缝中心。
22、进一步地,所述采用几何推理方法来推导出焊枪中心,其具体实现的方法包括:
23、基于焊枪上下边缘两侧斜边反向延伸,使两条焊枪上下边缘特征线延长相交于一点,形成两条延长线之间的夹角,对该夹角画出角平分线,该角平分线则就作为焊枪中心。
24、进一步地,所述标定板的型号为gb025-1。
25、一种自动焊接机,所述自动焊接机中设置有纠偏系统,所述纠偏系统中采用上述焊接图像特征提取方法来确定焊枪中心和焊缝中心,并依据焊枪中心和焊缝中心来实施纠偏动作。
26、在本发明的焊接图像特征提取方法中,在进行焊接作业前,对自动焊接机上的非垂直固定的相机进行标定,从而解决了相机视场畸变的问题。
27、在本发明的焊接图像特征提取方法中,利用引进高斯滤波的sobel算法对焊枪进行处理分析,滤除掉焊枪产生的伪边缘干扰;通过高斯拉普拉斯算法与zero-crossing算法区分出焊件划痕和焊缝的差异,通过计数遍历、轮廓分割和轮廓筛选方法,将焊枪和焊缝特征提取,这样一来,就避免图像中存在干扰。
28、在本发明的焊接图像特征提取方法中,利用roi感兴区域处理图像,将焊接图像进行区域化重点分析痛点区域,对非感兴区域忽略处理,这样一来,就提升了算法处理的时效性,从而能够准确快速地识别焊接图像的有效特征。
29、本发明的焊接图像特征提取方法和自动焊接机相对现有技术,其有益效果在于:解决了相机视场畸变的问题,从而能够获取更为准确的图像;能够消除图像中的干扰,并且准确快速地识别焊接图像的有效特征,有利于准确快速识别焊缝中心和焊枪中心,为自动焊接机中纠偏系统实施纠偏动作提供准确有效的依据。
技术特征:
1.一种焊接图像特征提取方法,其特征在于:包括:
2.根据权利要求1所述焊接图像特征提取方法,其特征在于:所述对自动焊接机上的相机进行标定,其具体实现的方法包括:
3.根据权利要求1所述焊接图像特征提取方法,其特征在于:所述对焊接图像提取出焊枪轮廓图像特征,其具体实现的方法包括:
4.根据权利要求3所述焊接图像特征提取方法,其特征在于:所述对焊接图像提取出焊道上下坡口图像特征,其具体实现的方法包括:
5.根据权利要求4所述焊接图像特征提取方法,其特征在于:所述基于焊枪轮廓图像特征和焊道上下坡口图像特征,得出焊枪中心和焊缝中心,其具体实现的方法包括:
6.根据权利要求5所述焊接图像特征提取方法,其特征在于:所述采用几何推理方法来推导出焊枪中心,其具体实现的方法包括:
7.根据权利要求1所述焊接图像特征提取方法,其特征在于:所述标定板的型号为gb025-1。
8.一种自动焊接机,所述自动焊接机中设置有纠偏系统,其特征在于:所述纠偏系统中采用如权利要求1至7中任一项所述焊接图像特征提取方法来确定焊枪中心和焊缝中心,并依据焊枪中心和焊缝中心来实施纠偏动作。
技术总结
本发明公开了一种焊接图像特征提取方法和自动焊接机。本发明的焊接图像特征提取方法包括:基于标定板,对自动焊接机上的相机进行标定;在用自动焊接机进行焊接作业的过程中,相机实时地摄取焊接图像;对焊接图像提取出焊枪轮廓图像特征;对焊接图像提取出焊道上下坡口图像特征;基于焊枪轮廓图像特征和焊道上下坡口图像特征,得出焊枪中心和焊缝中心。本发明的自动焊接机,其纠偏系统中采用上述焊接图像特征提取方法来确定焊枪中心和焊缝中心。本发明的焊接图像特征提取方法和自动焊接机,解决了相机视场畸变的问题;能够消除图像中的干扰,并且准确快速地识别焊接图像的有效特征,有利于准确快速识别焊缝中心和焊枪中心。
技术研发人员:范李哲,张旺,李泽昊
受保护的技术使用者:上海电机学院
技术研发日:
技术公布日:2024/1/15
- 还没有人留言评论。精彩留言会获得点赞!