基于来自远程摄像头的姿态校正的交通工具定位的制作方法
背景技术:
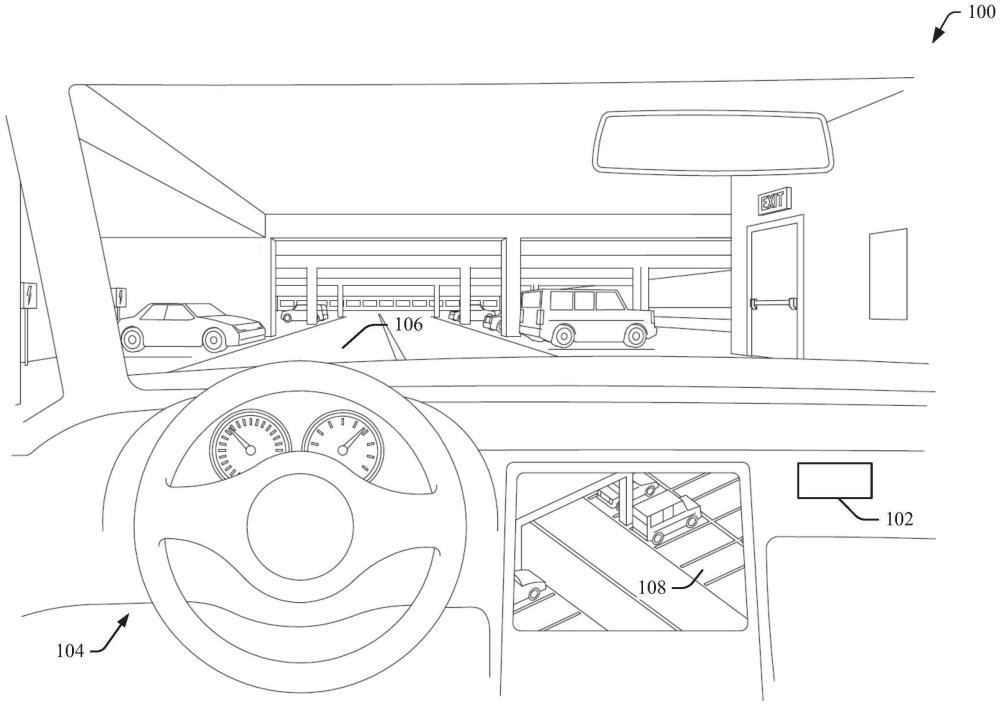
1、交通工具定位是一种使用传感器数据将交通工具定位到地图(例如,确定交通工具在参考地图上的位置)的技术。交通工具定位可用于支持自主交通工具操作,诸如自动代客停车。自动代客停车可涉及交通工具到达下车(drop-off)区域(例如,指定的停车点)、驾驶员离开交通工具、交通工具自主驾驶到停车区域,以及随后驾驶员远程召唤交通工具到取车(pickup)区域(例如,指定的装载点)为了执行停车和召唤交通工具所需的自主驾驶,自动代客停车系统需要精确的交通工具定位。
2、一些自主交通工具执行取决于接近亚米级精确度水平的定位精确度的驾驶操作。亚米级精确度水平可通过导航系统(包括全球导航卫星系统(gnss)接收器)实现。然而,当交通工具处于gnss拒绝环境(例如室内停车结构或车库)内时,gnss系统通常不能接收定位数据,因此交通工具不能执行自动代客停车。
技术实现思路
1、本文档描述了用于基于来自停车库和其他gnss拒绝环境中的远程摄像头的姿态(pose)校正的交通工具定位的技术和系统。在一些示例中,系统包括至少一个处理器和至少一个计算机可读存储介质,该至少一个计算机可读存储介质包括指令,当由处理器执行该指令时,使得系统在主交通工具已经停在gnss拒绝环境中的下车区域之后确定主交通工具在gnss拒绝环境内的估计姿态。该系统还可以从gnss拒绝环境中的一个或多个远程摄像头接收主交通工具的校正姿态。指令进一步使得处理器使用校正姿态来确定主交通工具的更新姿态。以此方式,所述系统可以以成本有效的方式在gnss拒绝环境中提供高度精确的交通工具定位,以支持自动代客停车和其他自主驾驶功能。
2、本文档还描述了由以上总结的系统和在本文中阐述的系统的其他配置来执行的方法、以及用于执行这些方法的装置。
3、本
技术实现要素:
介绍了与基于来自停车库中的远程摄像头的姿态校正的交通工具定位相关的简化概念,该简化概念在具体实施方式和附图中被进一步描述。本发明内容并非旨在标识出要求保护的主题的必要特征,也并非旨在用于确定要求保护的主题的范围。
技术特征:
1.一种方法,所述方法包括:
2.如权利要求1所述的方法,其特征在于,所述方法进一步包括:
3.如权利要求2所述的方法,其特征在于,所述姿态请求是使用无线链路发送的,所述无线链路使用专用短程通信、交通工具对一切(v2x)、蓝牙或蜂窝通信中的至少一者。
4.如权利要求1所述的方法,其特征在于,所述远程摄像头包括智能手机摄像头。
5.如权利要求1所述的方法,其特征在于,所述远程摄像头包括安装在所述gnss拒绝环境中的基础设施摄像头,所述基础设施摄像头具有包括所述下车区域的视场。
6.如权利要求1所述的方法,其特征在于,所述估计姿态和所述更新姿态是相对于地图坐标系的。
7.如权利要求1所述的方法,其特征在于,确定所述主交通工具在所述gnss拒绝环境内的所述估计姿态包括:
8.如权利要求1所述的方法,其特征在于,通过处理停在所述下车区域内的所述主交通工具的图像来确定所述主交通工具的所述校正姿态,所述处理包括将所述主交通工具的一个或多个部分的相对位置与所述下车区域的一个或多个特征进行比较。
9.如权利要求1所述的方法,其特征在于:
10.如权利要求9所述的方法,其特征在于,所述方法进一步包括:
11.如权利要求9所述的方法,其特征在于,所述方法进一步包括:
12.如权利要求9所述的方法,其特征在于,所述方法进一步包括:
13.如权利要求1所述的方法,其特征在于,所述方法进一步包括:
14.如权利要求1所述的方法,其特征在于:
15.一种系统,所述系统包括:
16.如权利要求15所述的系统,其特征在于,所述一个或多个处理器进一步被配置成用于:向所述gnss拒绝环境中的所述远程摄像头发送提供所述gnss拒绝环境内的所述主交通工具的所述校正姿态的姿态请求。
17.如权利要求15所述的系统,其特征在于,通过处理停在所述下车区域内的所述主交通工具的图像来确定所述主交通工具的所述校正姿态,所述处理包括将所述主交通工具的一个或多个部分的相对位置与所述下车区域的一个或多个特征进行比较。
18.如权利要求15所述的系统,其特征在于,所述一个或多个处理器进一步被配置成用于:当所述主交通工具停在所述下车区域中时,使用所述远程摄像头确定所述主交通工具的初始状况。
19.如权利要求15所述的系统,其特征在于:
20.一种非瞬态计算机可读介质,所述非瞬态计算机可读介质存储计算机可执行指令,所述计算机可执行指令在由处理器执行时,使得所述处理器:
技术总结
本文档描述了用于基于来自停车库和其他GNSS拒绝环境中的远程摄像头的姿态校正的交通工具定位的技术和系统。系统可以包括处理器和包括指令的计算机可读存储介质,当处理器执行指令时,以使系统在主交通工具已经停在下车区域处之后确定主交通工具在GNSS拒绝环境中内的估计姿态。该系统还可以从GNSS拒绝环境中的一个或多个远程摄像头接收主交通工具的校正姿态。指令进一步使处理器使用校正姿态来确定主交通工具的更新姿态。以此方式,该系统可以以成本有效的方式提供在GNSS拒绝环境中的高度精确的交通工具定位,以支持自动代客停车和其他自主驾驶功能。
技术研发人员:C·A·海吉斯,J·S·格林
受保护的技术使用者:安波福技术有限公司
技术研发日:
技术公布日:2024/2/25
- 还没有人留言评论。精彩留言会获得点赞!