一种轨迹插补方法、装置、设备及计算机可读存储介质与流程
本申请属于点胶,尤其涉及一种轨迹插补方法、装置、设备及计算机可读存储介质。
背景技术:
1、五轴设备在对产品工件表面或者内部进行点胶时,需要视觉或激光引导,来对预设的点胶轨迹进行点胶。
2、现有技术中,由于点胶轨迹是实时变化的,需要对预设的点胶轨迹上的每个插补点都作为引导点,进行视觉或激光引导,但是,对每个引导点都进行引导,会加长产品工件的加工时间,影响加工效率,并且,当对产品工件的背面或者产品内部缝隙等位置进行引导时,需要五轴设备偏转较大的角度,而由于受到五轴设备或产品工件的遮挡,导致视觉或激光无法观测到引导点,则只能放弃该点的补偿,导致插补轨迹精度降低。
技术实现思路
1、本申请实施例提供了一种轨迹插补方法、装置、设备及计算机可读存储介质,可以解决对每个插补点都进行引导,加长产品工件的加工时间,影响加工效率的问题。
2、第一方面,本申请实施例提供了一种轨迹插补方法,应用于五轴设备,该方法包括:
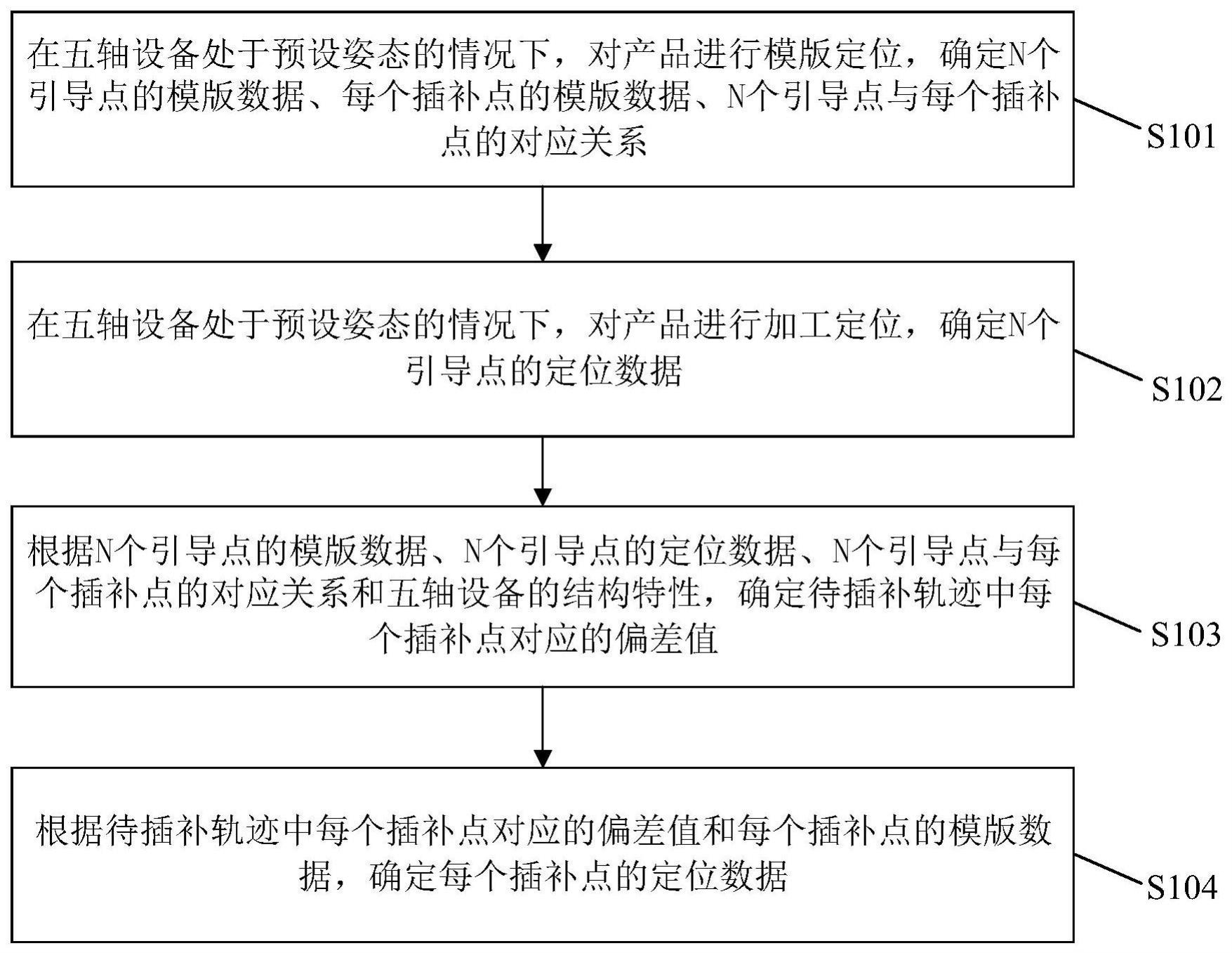
3、在五轴设备处于预设姿态的情况下,对产品进行模版定位,确定n个引导点的模版数据、每个插补点的模版数据、n个引导点与每个插补点的对应关系;n为小于m的正整数,m为待插补轨迹中插补点的总数量;
4、在五轴设备处于预设姿态的情况下,对产品进行加工定位,确定n个引导点的定位数据;
5、根据n个引导点的模版数据、n个引导点的定位数据、n个引导点与每个插补点的对应关系和五轴设备的结构特性,确定待插补轨迹中每个插补点对应的偏差值;
6、根据待插补轨迹中每个插补点对应的偏差值和每个插补点的模版数据,确定每个插补点的定位数据。
7、第一方面提供的轨迹插补方法,该方法中通过小于待插补轨迹中插补点的总数量的引导点,对待插补轨迹进行引导,从而无需对待插补轨迹中的每个插补点都进行引导,减少了进行视觉或者激光引导的工作量,减少了加工时长,提高了加工效率。
8、在第一方面的一种可能的实现方式中,根据n个引导点的模版数据、n个引导点的定位数据、n个引导点与每个插补点的对应关系和五轴设备的结构特性,确定待插补轨迹中每个插补点对应的偏差值,包括:
9、根据n个引导点的模版数据、n个引导点的定位数据,确定n个引导点中每个引导点的模版数据与n个引导点中每个引导点的定位数据的差值,作为n个引导点中每个引导点对应的偏差值;
10、根据n个引导点中每个引导点对应的偏差值、n个引导点与每个插补点的对应关系和五轴设备的结构特性,确定待插补轨迹中每个插补点对应的偏差值。
11、在该实施方式中,首先根据n个引导点的模版数据、n个引导点的定位数据,确定出n个引导点中每个引导点对应的偏差值;再利用n个引导点中每个引导点对应的偏差值、n个引导点与每个插补点的对应关系和五轴设备的结构特性,确定待插补轨迹中每个插补点对应的偏差值;从而可以在通过n个引导点对待插补轨迹进行引导时,通过计算的方式,确定待插补轨迹中每个插补点对应的偏差值,具体说明了确定待插补轨迹中每个插补点对应的偏差值的方式。
12、在第一方面的一种可能的实现方式中,根据n个引导点中每个引导点对应的偏差值、n个引导点与每个插补点的对应关系和五轴设备的结构特性,确定待插补轨迹中每个插补点对应的偏差值,包括:在n个引导点与每个插补点的对应关系包括:一个引导点对应一个插补点的情况下,根据一个引导点对应的偏差值和五轴设备的结构特性,确定与一个引导点对应的一个插补点对应的偏差值;在n个引导点与每个插补点的对应关系包括:两个引导点对应一个插补点的情况下,根据两个引导点对应的偏差值和五轴设备的结构特性,确定与两个引导点对应的一个插补点对应的偏差值。
13、在该实现方式中,一个插补点可以对应不同数量的引导点,根据一个引导点对应的偏差值或者两个引导点对应的偏差值,都能够确定出一个插补点对应的偏差值。
14、在第一方面的一种可能的实现方式中,预设姿态包括初始姿态。在该实现方式中,在五轴设备处于初始姿态进行定位时,干扰点较少,使得确定的引导点更加稳定,成像效果更好,使得确定的引导点的数据更加准确。
15、在第一方面的一种可能的实现方式中,n个引导点的模版数据包括:n个引导点的位置数据和/或n个引导点的角度数据,每个插补点的模版数据包括:每个插补点的位置数据和/或每个插补点的角度数据。
16、在第一方面的一种可能的实现方式中,n个引导点中每个引导点的模版数据大于-1且小于1。在该实现方式中,由于五轴设备中存在干扰点,会对引导点的模版数据产生影响,因此,对n个引导点中每个引导点的模版数据进行筛选,排除模版数据偏大或偏小的引导点,确定符合条件的n个引导点的模版数据,从而提高轨迹插补的精度。
17、在第一方面的一种可能的实现方式中,n个引导点中每个引导点对应的偏差值大于-1且小于1。在该实现方式中,由于五轴设备中存在干扰点,会对引导点的定位数据产生影响,进而对引导点对应的偏差值产生影响,因此,对n个引导点中每个引导点对应的偏差值进行筛选,排除偏差值偏大或偏小的引导点,确定符合条件的n个引导点对应的偏差值,从而提高轨迹插补的精度。
18、第二方面,本申请实施例提供了一种轨迹插补装置,包括:用于执行如以上第一方面中任一实施方式中所述的方法的各个步骤的单元。
19、第三方面,本申请实施例提供了一种轨迹插补设备,包括存储器、处理器以及存储在所述存储器中并可在所述处理器上运行的计算机程序,所述处理器执行所述计算机程序时实现如以上第一方面中任一实施方式中所述方法的步骤。
20、第四方面,本申请实施例提供了一种计算机可读存储介质,所述计算机可读存储介质中存储有计算机程序或指令,当计算机读取并执行所述计算机程序或指令时,使得计算机执行如以上第一方面中任一实施方式中所述方法的步骤。
21、第五方面,本申请实施例提供了一种计算机程序产品,当计算机程序产品在终端设备上运行时,使得终端设备执行上述第一方面中任一项所述的轨迹插补方法。
22、第六方面,本申请实施例提供了一种芯片,包括:处理器,用于从存储器中调用并运行计算机程序,使得安装有所述芯片的轨迹插补设备执行如以上第一方面中任一实施方式中所述的方法。
23、可以理解的是,上述第二方面至第六方面的有益效果可以参见上述第一方面中的相关描述,在此不再赘述。
技术特征:
1.一种轨迹插补方法,应用于五轴设备,其特征在于,包括:
2.如权利要求1所述的轨迹插补方法,其特征在于,所述根据所述n个引导点的模版数据、所述n个引导点的定位数据、所述n个引导点与所述每个插补点的对应关系和所述五轴设备的结构特性,确定所述待插补轨迹中每个插补点对应的偏差值,包括:
3.如权利要求2所述的轨迹插补方法,其特征在于,所述根据所述n个引导点中每个引导点对应的偏差值、所述n个引导点与所述每个插补点的对应关系和所述五轴设备的结构特性,确定所述待插补轨迹中每个插补点对应的偏差值,包括:
4.如权利要求1或2所述的轨迹插补方法,其特征在于,所述预设姿态包括初始姿态。
5.如权利要求1或2所述的轨迹插补方法,其特征在于,所述n个引导点的模版数据包括:所述n个引导点的位置数据和/或所述n个引导点的角度数据,所述每个插补点的模版数据包括:所述每个插补点的位置数据和/或所述每个插补点的角度数据。
6.如权利要求1所述的轨迹插补方法,其特征在于,所述n个引导点中每个引导点的模版数据大于-1且小于1。
7.如权利要求2所述的轨迹插补方法,其特征在于,所述n个引导点中每个引导点对应的偏差值大于-1且小于1。
8.一种轨迹插补装置,其特征在于,所述装置包括用于执行如权利要求1至7中任一项所述的方法的各个步骤的单元。
9.一种轨迹插补设备,包括存储器、处理器以及存储在所述存储器中并可在所述处理器上运行的计算机程序,其特征在于,所述处理器执行所述计算机程序时实现如权利要求1至7任一项所述的方法的步骤。
10.一种计算机可读存储介质,所述计算机可读存储介质存储有计算机程序,其特征在于,所述计算机程序被处理器执行时实现如权利要求1至7任一项所述的方法。
技术总结
本申请适用于点胶技术领域,提供了一种轨迹插补方法、装置、设备及计算机可读存储介质,该方法包括:在五轴设备处于预设姿态的情况下,对产品进行模版定位,确定N个引导点的模版数据、每个插补点的模版数据、N个引导点与每个插补点的对应关系;N为小于M的正整数,M为待插补轨迹中插补点的总数量;在五轴设备处于预设姿态的情况下,对产品进行加工定位,确定N个引导点的定位数据;根据N个引导点的模版数据、N个引导点的定位数据、N个引导点与每个插补点的对应关系和五轴设备的结构特性,确定待插补轨迹中每个插补点对应的偏差值;根据待插补轨迹中每个插补点对应的偏差值和每个插补点的模版数据,确定每个插补点的定位数据。
技术研发人员:黄爱林,李国庆
受保护的技术使用者:深圳市世宗自动化设备有限公司
技术研发日:
技术公布日:2024/1/16
- 还没有人留言评论。精彩留言会获得点赞!