高空幕墙清洗无人机的身份识别控制方法与流程
本发明涉及无人机的身份识别控制方法,具体为高空幕墙清洗无人机的身份识别控制方法,属于高空幕墙清洗无人机身份识别控制。
背景技术:
1、擦玻璃机器人设计一般由执行机构、驱动装置、检测装置和控制系统和复杂机械等组成。机器人是自动执行工作的机器装置。它既可以接受人类指挥,又可以运行预先编排的程序,也可以根据以人工智能技术制定的原则纲领行动。它的任务是协助或取代人类工作的工作,例如生产业、建筑业,或是危险的工作,现有的高空玻璃清洁机器人多数为飞机执行擦拭任务,并实现对玻璃的表面进行清洗;
2、但是现在有的无人机不同时具备人脸识别及验证飞近的无人机航线信息,导致不能实现对航线区域无人机使用者的信息和飞行计划监管,为此,提出高空幕墙清洗无人机的身份识别控制方法。
技术实现思路
1、有鉴于此,本发明提供高空幕墙清洗无人机的身份识别控制方法,以解决或缓解现有技术中存在的技术问题,至少提供一种有益的选择。
2、本发明实施例的技术方案是这样实现的:一种高空幕墙清洗无人机的身份识别控制方法,包括以下步骤:
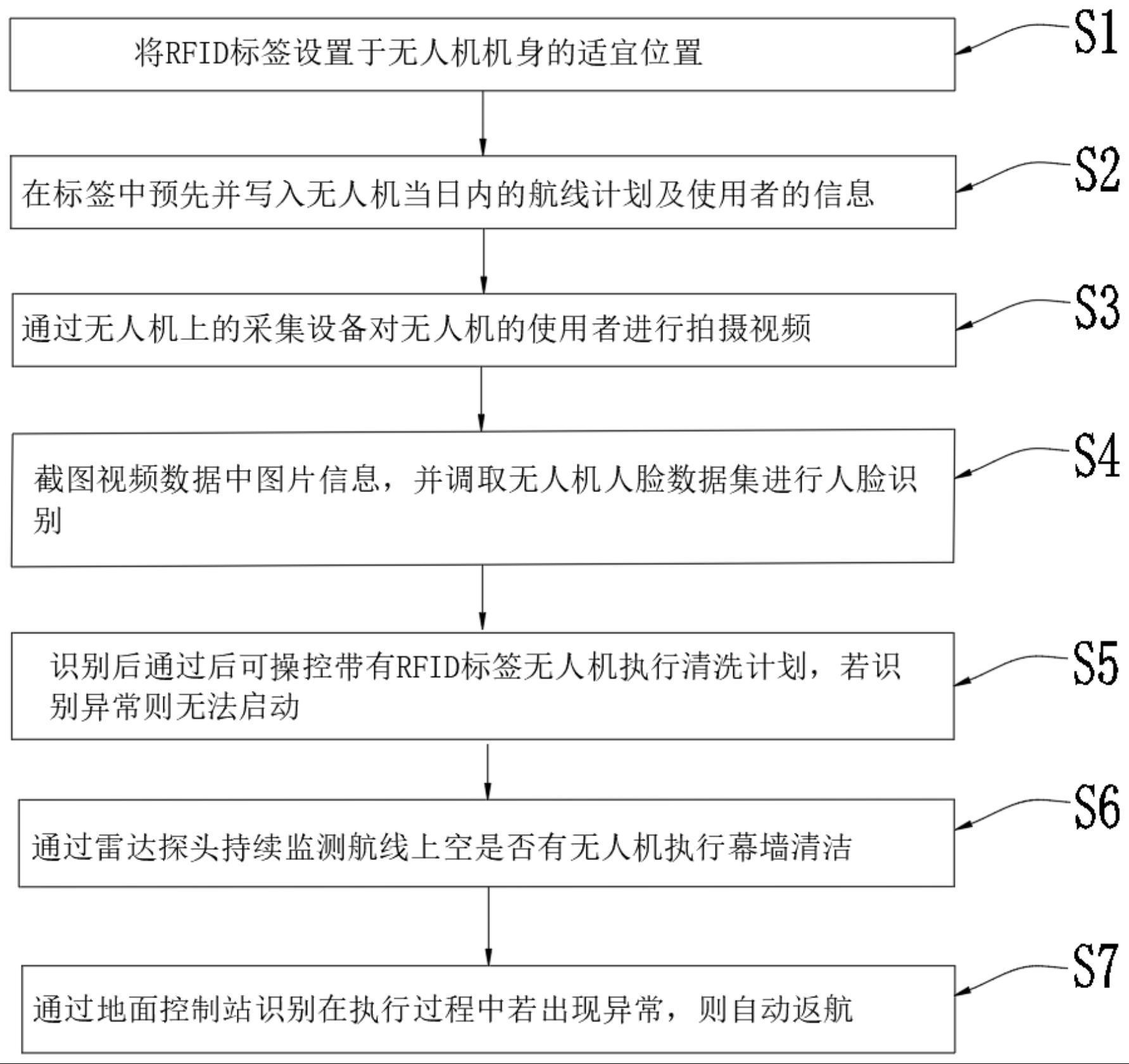
3、s1、将rfid标签设置于无人机机身的适宜位置;
4、s2、在标签中预先并写入无当日内的航线计划及使用者的信息;
5、s3、通过无人机上的采集设备对无人机的使用者进行拍摄视频;
6、s4、截图视频数据中图片信息,并调取无人机人脸数据集进行人脸识别;
7、s5、识别后通过后操控带有rfid标签无人机执行清洗计划,若识别异常则无法启动;
8、s6、通过雷达探头持续监测航线上空是否有无人机执行幕墙清洁;
9、s7、通过地面控制站识别在执行过程中若出现异常,则自动返航。
10、本发明将rfid标签设置于无人机机身的适宜位置,在标签中预先并写入无当日内的航线计划及使用者的信息,通过无人机上的采集设备对无人机的使用者进行拍摄视频,截图视频数据中图片信息,并调取无人机人脸数据集进行人脸识别,识别后通过后操控带有rfid标签无人机执行清洗计划,若识别异常则无法启动,通过雷达探头持续监测航线上空是否有无人机执行幕墙清洁,通过地面控制站识别在执行过程中若出现异常,则自动返航。
11、进一步优选的,所述s4中地面控制站中包括读取模块。
12、进一步优选的,所述s2中通过采集设备拍摄无人机视角下各种形态的人图片,通过标注获取人脸目标框,并对目标人脸进行聚类,建立无人机人脸数据集并进行标注。
13、进一步优选的,所述s2中在rfid标签中预先写入无人机当日及后续一个时间段内的航线幕墙清洁计划,并将使用者的个人图片输入至地面控制站及无人机人脸数据集中。
14、进一步优选的,所述s4中通过人脸识别模型mobilefacenet,对无人机人脸数据集进行识别,若识别异常则无法启动。
15、进一步优选的,所述mobilefacenet识别模型,轻量级的模型参数量小,在识别准确率方面获得了再一次的提升。
16、进一步优选的,所述s6中通过雷达探头持续监测航线,当判断为有后,发送信号给读取装置,读取装置发送信号以读取飞经其上空或者近旁的无人机上的rfid标签,并和地面控制站进行效验。
17、进一步优选的,当雷达探头监测到无人机目标飞近,而读取装置无法读取验证目标无人机的rfid标签时,读取装置发送异常警报给地面控制站,无人机并自动返航。
18、本发明实施例由于采用以上技术方案,其具有以下优点:
19、本发明将rfid标签设置于无人机机身的适宜位置,在标签中预先并写入无当日内的航线计划及使用者的信息,通过无人机上的采集设备对无人机的使用者进行拍摄视频,截图视频数据中图片信息,并调取无人机人脸数据集进行人脸识别,识别后通过后操控带有rfid标签无人机执行清洗计划,若识别异常则无法启动,通过雷达探头持续监测航线上空是否有无人机执行幕墙清洁,通过地面控制站识别在执行过程中若出现异常,则自动返航,通过人脸识别技术,可识别使用无人机的工作人员信息进行验证同时通过在航线沿途部署雷达探头和rfid标签的读取装置,可以识别验证飞近的无人机航线信息,实现对航线区域无人机有效的飞行计划监管。
20、上述概述仅仅是为了说明书的目的,并不意图以任何方式进行限制。除上述描述的示意性的方面、实施方式和特征之外,通过参考附图和以下的详细描述,本发明进一步的方面、实施方式和特征将会是容易明白的。
技术特征:
1.一种高空幕墙清洗无人机的身份识别控制方法,其特征在于,包括以下步骤:
2.根据权利要求1所述的高空幕墙清洗无人机的身份识别控制方法,其特征在于:所述s4中地面控制站中包括读取模块。
3.根据权利要求1所述的高空幕墙清洗无人机的身份识别控制方法,其特征在于:所述s2中通过采集设备拍摄无人机视角下各种形态的人图片,通过标注获取人脸目标框,并对目标人脸进行聚类,建立无人机人脸数据集并进行标注。
4.根据权利要求1所述的高空幕墙清洗无人机的身份识别控制方法,其特征在于:所述s2中在rfid标签中预先写入无人机当日及后续一个时间段内的航线幕墙清洁计划,并将使用者的个人图片输入至地面控制站及无人机人脸数据集中。
5.根据权利要求1所述的高空幕墙清洗无人机的身份识别控制方法,其特征在于:所述s4中通过人脸识别模型mobilefacenet,对无人机人脸数据集进行识别,若识别异常则无法启动。
6.根据权利要求5所述的高空幕墙清洗无人机的身份识别控制方法,其特征在于:所述mobile face net识别模型,轻量级的模型参数量小,在识别准确率方面获得了再一次的提升。
7.根据权利要求1所述的高空幕墙清洗无人机的身份识别控制方法,其特征在于:所述s6中通过雷达探头持续监测航线,当判断为有后,发送信号给读取装置,读取装置发送信号以读取飞经其上空或者近旁的无人机上的rfid标签,并和地面控制站进行效验。
8.根据权利要求7所述的高空幕墙清洗无人机的身份识别控制方法,其特征在于:当雷达探头监测到无人机目标飞近,而读取装置无法读取验证目标无人机的rfid标签时,读取装置发送异常警报给地面控制站,无人机并自动返航。
技术总结
本发明提供了一种高空幕墙清洗无人机的身份识别控制方法,包括以下步骤:S1、将RFID标签设置于无人机机身的适宜位置。本发明将RFID标签设置于无人机机身的适宜位置,在标签中预先并写入无当日内的航线计划及使用者的信息,无人机上采集设备对无人机使用者拍摄视频,截图视频数据中图片信息,调取无人机人脸数据集进行人脸识别,识别后通过后操控带有RFID标签无人机执行清洗计划,通过雷达探头持续监测航线上空是否有无人机执行幕墙清洁,通过人脸识别技术,可识别使用无人机的工作人员信息进行验证同时通过在航线沿途部署雷达探头和RFID标签的读取装置,识别验证飞近的无人机航线信息,实现对航线区域无人机有效的飞行计划监管。
技术研发人员:杨杨,周晓悦,赵保军,王跃征
受保护的技术使用者:深圳市三合智义科技有限公司
技术研发日:
技术公布日:2024/1/16
- 还没有人留言评论。精彩留言会获得点赞!