基于机器学习的挖掘机操作评价方法及系统与流程
本发明涉及挖掘机,具体涉及一种基于机器学习的挖掘机操作评价方法及系统。
背景技术:
1、大型矿用挖掘机是露天矿山开采的关键设备,若挖掘机操作不当则可能引起人员伤亡以及设备的损坏。为此,在进行挖掘机操作时,操作人员必须严格遵守安全操作规程。在实际的挖掘机操作使用过程中,不同的操作人员通常有不同的操作水平体现,而不同的操作水平对挖掘机的使用状态、使用效率及其使用寿命密切相关。因此,进行挖掘机的操作使用时,有必要对操作人员的操作水平进行评价,以便于操作人员基于评价结果调整和提升自身的操作技能。
2、目前在对挖掘机的操作人员的操作水平进行评价时,要么通过经验性质的操作感受来对操作水平进行评价,要么通过提取几个操作结果数据来进行评价,要么由检测人员进行定期或不定期的流动检测。
3、然而,上述评价方法中,前两种评价方法所得到的评价结果的可靠性较差,难以有效地指导操作人员进行改进,提升操作技能。后一种评价方法的效率较低,且为了提高评价结果的可靠性,检测人员还需要由操作水平优秀的操作员来承担,成本较高。
技术实现思路
1、为解决上述现有技术中存在的部分或全部技术问题,本发明提供一种基于机器学习的挖掘机操作评价方法及系统。
2、本发明的技术方案如下:
3、第一方面,提供了一种基于机器学习的挖掘机操作评价方法,所述方法包括:
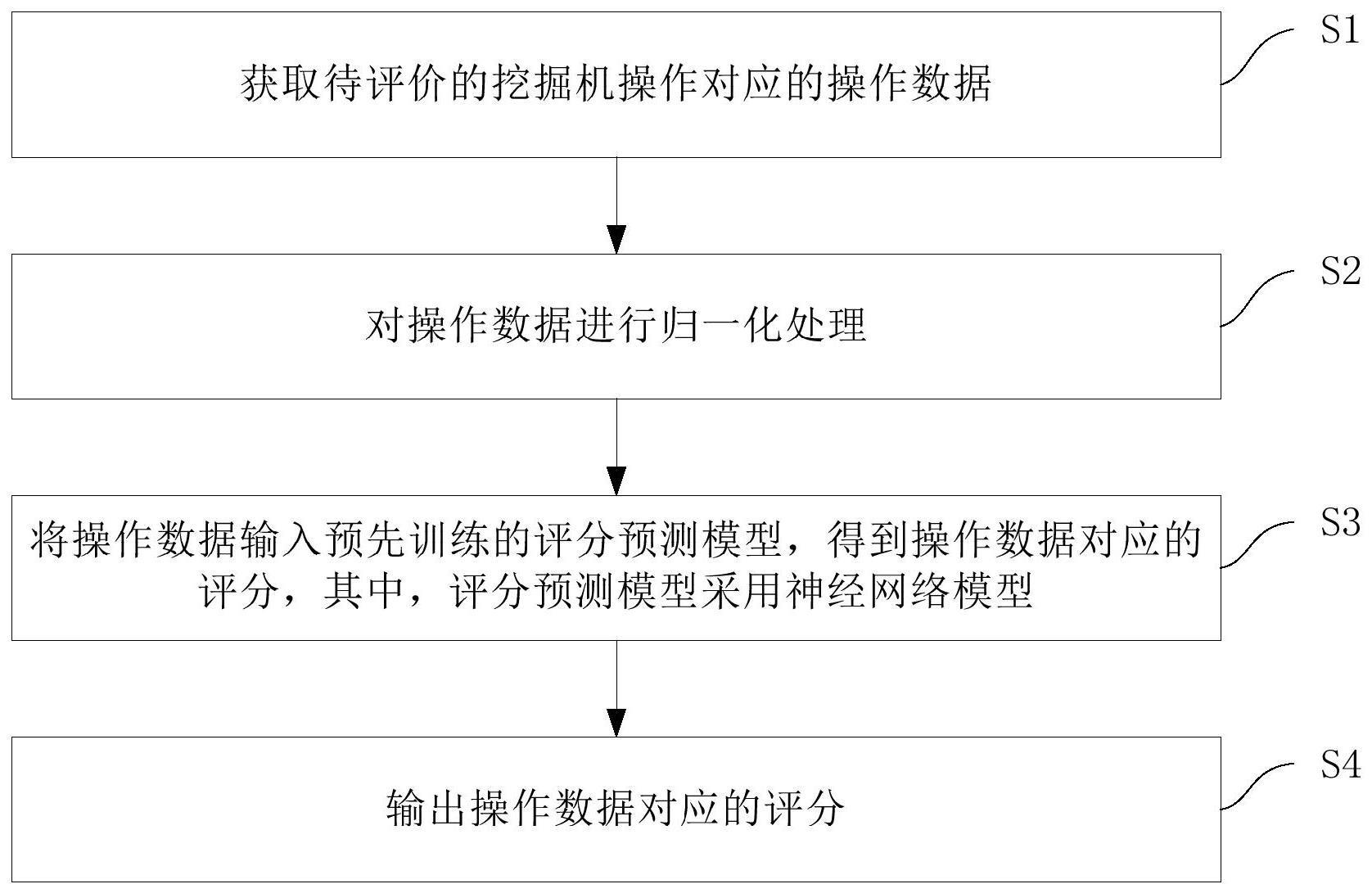
4、获取待评价的挖掘机操作对应的操作数据;
5、对所述操作数据进行归一化处理;
6、将所述操作数据输入预先训练的评分预测模型,得到所述操作数据对应的评分,其中,所述评分预测模型采用神经网络模型;
7、输出所述操作数据对应的评分。
8、在一些可能的实现方式中,所述操作数据包括:挖掘机的生产数据、故障数据和作业状态数据。
9、在一些可能的实现方式中,所述生产数据包括:单位时间产量、单位时间能耗、每万立方移位里程、平均装车时间、操作时间占比和平台地面倾角。
10、在一些可能的实现方式中,所述故障数据包括:触发保护次数、操作导致故障时间、操作导致故障次数、振动持续超限时间和故障重复率。
11、在一些可能的实现方式中,所述作业状态数据包括:物料面高度、物料密度、装车角度、矿车数量、矿车运距和岩石爆破程度。
12、在一些可能的实现方式中,所述评分预测模型采用多层感知机,多层感知机包括:输入层、隐藏层和输出层,输入层与隐藏层之间采用全连接方式相连,隐藏层与输出层之间采用全连接方式相连。
13、在一些可能的实现方式中,所述评分预测模型通过如下方式训练:
14、获取训练数据集,训练数据包括一个完整挖掘机操作过程的操作数据及其对应的评分;
15、对所述训练数据中的操作数据进行归一化处理,将归一化处理后的操作数据作为输入,将与操作数据对应的评分作为输出,训练评分预测模型。
16、在一些可能的实现方式中,将归一化处理后的操作数据作为输入,将与操作数据对应的评分作为输出,训练所述评分预测模型,包括:
17、步骤s321,将多个操作数据按批次输入评分预测模型,得到评分预测模型输出的每个操作数据对应的预测评分;
18、步骤s321,根据操作数据对应的评分和预测评分,计算预设损失函数;
19、步骤s323,判断是否达到预设训练停止条件,若是,则将当前的评分预测模型作为完成训练的评分预测模型,若否,则利用预设损失函数更新评分预测模型的参数,并返回步骤s321。
20、第二方面,还提供了一种基于机器学习的挖掘机操作评价系统,所述系统包括:
21、获取单元,被配置为获取待评价的挖掘机操作对应的操作数据;
22、数据处理单元,被配置为对所述操作数据进行归一化处理;
23、评分单元,被配置为将所述操作数据输入预先训练的评分预测模型,得到所述操作数据对应的评分,其中,所述评分预测模型采用神经网络模型;
24、输出单元,被配置为输出所述操作数据对应的评分。
25、本发明技术方案的主要优点如下:
26、本发明的基于机器学习的挖掘机操作评价方法及系统通过机器学习构建评分预测模型,能够利用评分预测模型实现挖掘机操作快速评价,无需检测人员,成本低,并且能够保证评价结果的准确性和可靠性。
技术特征:
1.一种基于机器学习的挖掘机操作评价方法,其特征在于,包括:
2.根据权利要求1所述的基于机器学习的挖掘机操作评价方法,其特征在于,所述操作数据包括:挖掘机的生产数据、故障数据和作业状态数据。
3.根据权利要求2所述的基于机器学习的挖掘机操作评价方法,其特征在于,所述生产数据包括:单位时间产量、单位时间能耗、每万立方移位里程、平均装车时间、操作时间占比和平台地面倾角。
4.根据权利要求2所述的基于机器学习的挖掘机操作评价方法,其特征在于,所述故障数据包括:触发保护次数、操作导致故障时间、操作导致故障次数、振动持续超限时间和故障重复率。
5.根据权利要求2所述的基于机器学习的挖掘机操作评价方法,其特征在于,所述作业状态数据包括:物料面高度、物料密度、装车角度、矿车数量、矿车运距和岩石爆破程度。
6.根据权利要求1所述的基于机器学习的挖掘机操作评价方法,其特征在于,所述评分预测模型采用多层感知机,多层感知机包括:输入层、隐藏层和输出层,输入层与隐藏层之间采用全连接方式相连,隐藏层与输出层之间采用全连接方式相连。
7.根据权利要求1所述的基于机器学习的挖掘机操作评价方法,其特征在于,所述评分预测模型通过如下方式训练:
8.根据权利要求7所述的基于机器学习的挖掘机操作评价方法,其特征在于,将归一化处理后的操作数据作为输入,将与操作数据对应的评分作为输出,训练所述评分预测模型,包括:
9.一种基于机器学习的挖掘机操作评价系统,其特征在于,包括:
技术总结
本发明公开了一种基于机器学习的挖掘机操作评价方法及系统,该方法包括:获取待评价的挖掘机操作对应的操作数据;对操作数据进行归一化处理;将操作数据输入预先训练的评分预测模型,得到操作数据对应的评分,其中,评分预测模型采用神经网络模型;输出操作数据对应的评分。本发明的基于机器学习的挖掘机操作评价方法及系统通过机器学习构建评分预测模型,能够利用评分预测模型实现挖掘机操作快速评价,无需检测人员,成本低,并且能够保证评价结果的准确性和可靠性。
技术研发人员:岳海峰,张震男,陈锐,周荣,郭云飞,范喜斌,职彦,张柏荣
受保护的技术使用者:太原重工股份有限公司
技术研发日:
技术公布日:2024/1/16
- 还没有人留言评论。精彩留言会获得点赞!