一种基于视觉深度信息的分体式飞行汽车定位对接方法
本发明涉及飞行汽车,尤其涉及一种基于视觉深度信息的分体式飞行汽车定位对接方法。
背景技术:
1、分体式飞行汽车是具有陆地行驶能力以及空中飞行能力的“全域化、智能化、分布式”集成装备,分体式飞行汽车同时具备无人机垂直起降和地面汽车道路行驶的功能,会在未来交通领域发挥重要作用。为实现无人机与地面车体的精准定位与对接;
2、无人机执行户外对接作业时,本身容易受到风力干扰导致悬停寻找目标时产生晃动,使得相机无法准确检测到目标平台。不同的光照、倾斜、遮挡也会改变和削弱目标物的特征,进一步增加了机载检测系统丢失目标物的可能性;
3、单一视觉定位方法,无论是单目定位还是双目定位,都无法达到较高的精度,并且稳定性较差,已有的目标检测算法对于运动中的目标也无法做到精确定位;
4、分体式飞行汽车尚未普及,致使针对该应用场景的对接机构发展也并不完善。
5、为此,我们设计一种基于视觉深度信息的分体式飞行汽车定位对接方法,用于对上述技术问题提供另一种技术方案。
技术实现思路
1、基于此,有必要针对上述技术问题,提供一种基于视觉深度信息的分体式飞行汽车定位对接方法,用于解决上述背景技术中提出的技术问题。
2、为了解决上述的技术问题,本发明采用了如下技术方案:
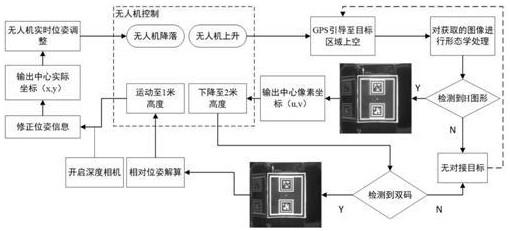
3、一种基于视觉深度信息的分体式飞行汽车定位对接方法,步骤如下:
4、s1:通过双码式标识物增加对接时的定位精准;
5、s2:构建目标检测场景库;
6、s3:将结构光获取的深度信息引入位姿矩阵,经过多源信息融合修正得到精确的相对坐标。
7、作为本发明提供的所述的一种基于视觉深度信息的分体式飞行汽车定位对接方法的一种优选实施方式,所述s1步骤中,双码式标识物由外框、h图形和双apriltag码组成;
8、所述外框在无人机远距离搜寻目标时能够被快速找到并列为备选对接区域;
9、所述h图形通过明显的角点特征和对称结构能够为筛选过程提供鲜明的形态学特征,确保筛选过程的准确性;
10、所述双apriltag码用于通过8个角点提供稳定的位置信息用于估算空间位置和三维姿态。
11、作为本发明提供的所述的一种基于视觉深度信息的分体式飞行汽车定位对接方法的一种优选实施方式,所述外框在像素点聚类计算时,凸四边形形状能够更加高效的被识别到。
12、作为本发明提供的所述的一种基于视觉深度信息的分体式飞行汽车定位对接方法的一种优选实施方式,所述h图形明显的角点特征中通过各角点的像素坐标初步计算出标识物的中心位置,为无人机提供合适的方位引导。
13、作为本发明提供的所述的一种基于视觉深度信息的分体式飞行汽车定位对接方法的一种优选实施方式,所述s2步骤中构建目标检测场景库,步骤如下:
14、通过收集环境信息及目标信息进行模型构建,对于不同的对接场景,结合对接平台的外形特征,设置合适的全连接层数、神经元个数、调整不同的神经网络层,训练出适用于不同平台特征的模型。
15、作为本发明提供的所述的一种基于视觉深度信息的分体式飞行汽车定位对接方法的一种优选实施方式,所述s3步骤中,将结构光获取的深度信息引入位姿矩阵,经过多源信息融合修正得到精确的相对坐标,步骤如下:
16、通过对标识物进行自适应阈值、连续边界分割、拟合四边形、单应变换、解码后与apriltag库进行匹配,获取目标点的位置和方向信息,通过配置depth流与color流后将深度帧与颜色帧对齐,融合深度信息。
17、可以毫无疑义的看出,通过本申请的上述的技术方案,必然可以解决本申请要解决的技术问题。
18、同时,通过以上技术方案,本发明至少具备以下有益效果:
19、本发明提供的一种基于视觉深度信息的分体式飞行汽车定位对接方法,通过多层级标识物精确度高、容错性强、灵活性高,适用于各类复杂环境,即使在被50%遮挡情况下,仍可以提供稳定可靠的位姿信息,从而提高视觉引导系统的可靠性和稳定性;
20、在对接过程中融合了来源于视觉及深度相机的位姿信息,降低了单一传感器误差的影响,提供了更全面、精确的定位与对接结果,实现了更准确的场景理解和位置推断,对接精度达到毫米级。
技术特征:
1.一种基于视觉深度信息的分体式飞行汽车定位对接方法,其特征在于,步骤如下:
2.根据权利要求1所述的一种基于视觉深度信息的分体式飞行汽车定位对接方法,其特征在于,所述s1步骤中,双码式标识物由外框、h图形和双apriltag码组成;
3.根据权利要求2所述的一种基于视觉深度信息的分体式飞行汽车定位对接方法,其特征在于,所述外框在像素点聚类计算时,凸四边形形状能够更加高效的被识别到。
4.根据权利要求2所述的一种基于视觉深度信息的分体式飞行汽车定位对接方法,其特征在于,所述h图形明显的角点特征中通过各角点的像素坐标初步计算出标识物的中心位置,为无人机提供合适的方位引导。
5.根据权利要求1所述的一种基于视觉深度信息的分体式飞行汽车定位对接方法,其特征在于,所述s2步骤中构建目标检测场景库,步骤如下:
6.根据权利要求1所述的一种基于视觉深度信息的分体式飞行汽车定位对接方法,其特征在于,所述s3步骤中,将结构光获取的深度信息引入位姿矩阵,经过多源信息融合修正得到精确的相对坐标,步骤如下:
技术总结
本发明涉及飞行汽车技术领域,尤其涉及一种基于视觉深度信息的分体式飞行汽车定位对接方法。步骤如下:S1:通过双码式标识物增加对接时的定位精准;S2:构建目标检测场景库;S3:将结构光获取的深度信息引入位姿矩阵,经过多源信息融合修正得到精确的相对坐标。本发明提供的一种基于视觉深度信息的分体式飞行汽车定位对接方法,通过多层级标识物精确度高、容错性强、灵活性高,适用于各类复杂环境,即使在被50%遮挡情况下,仍可以提供稳定可靠的位姿信息,从而提高视觉引导系统的可靠性和稳定性。
技术研发人员:邵家儒,陈炭洁,杨瑜,郑子君
受保护的技术使用者:重庆理工大学
技术研发日:
技术公布日:2024/1/16
- 还没有人留言评论。精彩留言会获得点赞!