基于高分辨率遥感图像的秸秆还田区域快速分割方法与流程
本申请涉及图像处理领域,特别是涉及基于高分辨率遥感图像的秸秆还田区域快速分割方法。
背景技术:
1、在实际的秸秆还田过程中,往往需要还田的土地附近还有仍然种植其他作物的土地,另外在对还田土地进行翻压之前,需要规划翻压路线以最大效率翻压土地。
2、在处理大面积土地时,经常会利用无人机遥感图像规划翻压路线,由于此类大面积土地往往自然环境较好,在秋收季节起雾概率高。因此如何根据还田实际情况优化去雾算法并分割还田区域,对于处在争分夺秒的农忙时期的农民来说,是一件亟需解决的问题。现有的去雾方法主要有三种:一是基于图像增强的处理方法,该方法不考虑有雾图像的形成过程,直接突出图像细节提升对比度,缺点是对于景深较大的图片去雾效果不够理想;二是基于神经网络的处理方法,该方法去雾的算法在效果上好于图像增强和复原的方法,但是由于在自然界中拍摄到一组背景相同的有雾图像和无雾图像时间成本较高,且设备成本同时较高。
技术实现思路
1、本发明提供基于高分辨率遥感图像的秸秆还田区域快速分割方法,该方法能够准确的对图像进行去雾处理,实现更理想的去雾效果,提高还田区域分割效率。
2、第一方面,本申请提供基于高分辨率遥感图像的秸秆还田区域快速分割方法,包括:
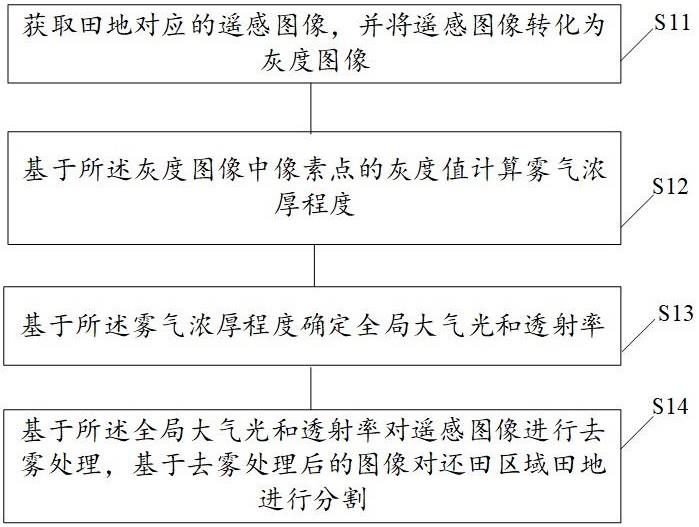
3、获取田地对应的遥感图像,并将遥感图像转化为灰度图像;
4、基于所述灰度图像中像素点的灰度值计算雾气浓厚程度;
5、基于所述雾气浓厚程度确定全局大气光和透射率;
6、基于所述全局大气光和透射率对遥感图像进行去雾处理,基于去雾处理后的图像对还田区域田地进行分割。
7、可选地,基于所述灰度图像中像素点的灰度值计算雾气浓厚程度,包括:
8、基于灰度图像中像素点的灰度值确定滑动窗口内目标的细节丢失程度;
9、基于灰度图像中像素点的灰度值确定滑动窗口内目标受雾气影响反射入镜头的光线丢失程度;
10、基于滑动窗口内目标图像的细节丢失程度以及目标物体受雾气影响反射入镜头的光线丢失程度计算滑动窗口对应的雾气浓厚程度。
11、可选地,基于灰度图像中像素点的灰度值确定滑动窗口内目标图像的细节丢失程度,包括:
12、基于滑动窗口内像素点的灰度值计算滑动窗口的梯度值极差,所述梯度值极差用于表征滑动窗口内目标图像的细节丢失程度;
13、基于灰度图像中像素点的灰度值确定滑动窗口内目标受雾气影响反射入镜头的光线丢失程度,包括:
14、基于滑动窗口内像素点的灰度值计算滑动窗口的灰度值方差,所述灰度值方差用于表征滑动窗口内目标受雾气影响反射入镜头的光线丢失程度;
15、基于滑动窗口内目标图像的细节丢失程度以及目标物体受雾气影响反射入镜头的光线丢失程度计算滑动窗口对应的雾气浓厚程度,包括:
16、利用如下公式计算雾气浓厚程度:
17、;
18、其中,f表示当前滑动窗口对应的雾气浓厚程度,n表示当前滑动窗口内的像素点总数,指第i个像素点的灰度值,,为当前滑动窗口中最大和最小梯度值,表示梯度值极差,表示灰度值方差。
19、可选地,基于所述雾气浓厚程度确定全局大气光和透射率,包括:
20、基于雾气浓厚程度确定边缘像素点;
21、利用第一滤波器对所述边缘像素点和雾气浓厚程度最大的滑动窗口中的像素点进行处理,利用第二滤波器对除边缘像素点外的其余像素点进行处理;所述第一滤波器的尺寸小于所述第二滤波器;
22、基于滤波处理后的暗通道图像确定全局大气光;
23、基于滑动窗口中像素点对应的雾气浓厚程度和全局大气光计算得到每一像素点的透射率。
24、可选地,基于雾气浓厚程度确定边缘像素点,包括:
25、构建雾气浓厚程度最大的滑动窗口对应的雾气浓厚程度矩阵;其中,所述雾气浓厚程度矩阵由滑动窗口内所有像素点的雾气浓厚程度组成;
26、计算雾气浓厚程度矩阵对应的梯度矩阵;
27、基于梯度矩阵的变化情况确定雾气浓厚程度最大的滑动窗口中每一像素点的边缘概率;
28、基于每一像素点的边缘概率确定边缘像素点。
29、可选地,基于滤波处理后的暗通道图像确定全局大气光,包括:
30、基于滤波处理后的暗通道图像确定暗通道图像的亮度值,并将暗通道图像的亮度值较大的第一预设数量的像素点作为第一候选像素点集合;其中,暗通道图像为rgb图像中r、g、b三个通道中最小的通道值组成的图像,其中,r、g、b三个通道中最小的通道值为暗通道图像的亮度值;
31、将第一候选像素点集合中的像素点的亮度值乘以对应的像素点的雾气浓厚程度;
32、选取乘积结果较大的第二预设数量的像素点,作为第二候选像素点集合;
33、获取第二候选像素点集合中像素点在遥感图像中的像素值,将彩色像素值最高的像素点对应的像素值作为所述全局大气光,其中,彩色像素值是将r、g、b三个通道的值加权平均后得到的。
34、可选地,基于滑动窗口中像素点对应的雾气浓厚程度和全局大气光计算得到每一像素点的透射率,包括:
35、利用如下公式计算透射率:
36、;
37、其中,t为像素点的透射率,a为全局大气光,i为滤波后的暗通道图像,f为像素点的雾气浓厚程度。
38、可选地,基于所述全局大气光和透射率对遥感图像进行去雾处理,包括:
39、利用全局大气光和每一像素点的透射率对遥感图像中每一像素点进行去雾处理;
40、其中,去雾处理包括:
41、;
42、其中,j表示去雾处理后的无雾像素点,所有的无雾像素点组成无雾图像。
43、可选地,基于梯度矩阵的变化情况确定雾气浓厚程度最大的滑动窗口中每一像素点的边缘概率,包括:
44、利用如下公式计算边缘概率:
45、;
46、其中,为像素点的边缘概率,为梯度矩阵中第i个点,为梯度矩阵中第i个点的8邻域,分别是梯度矩阵中的最大值和最小值。
47、可选地,基于每一像素点的边缘概率确定边缘像素点,包括:
48、将边缘概率大于预设值的像素点确定为边缘像素点。
49、本申请的有益效果,区别于现有技术,本申请的基于高分辨率遥感图像的秸秆还田区域快速分割方法,包括:获取田地对应的遥感图像,并将遥感图像转化为灰度图像;基于所述灰度图像中像素点的灰度值计算雾气浓厚程度;基于所述雾气浓厚程度确定全局大气光和透射率;基于所述全局大气光和透射率对遥感图像进行去雾处理,基于去雾处理后的图像对还田区域田地进行分割。该方法能够准确的对图像进行去雾处理,实现更理想的去雾效果,提高还田区域分割效率。
技术特征:
1.基于高分辨率遥感图像的秸秆还田区域快速分割方法,其特征在于,包括:
2.根据权利要求1所述的基于高分辨率遥感图像的秸秆还田区域快速分割方法,其特征在于,基于所述灰度图像中像素点的灰度值计算雾气浓厚程度,包括:
3.根据权利要求2所述的基于高分辨率遥感图像的秸秆还田区域快速分割方法,其特征在于,基于灰度图像中像素点的灰度值确定滑动窗口内目标图像的细节丢失程度,包括:
4.根据权利要求2所述的基于高分辨率遥感图像的秸秆还田区域快速分割方法,其特征在于,基于所述雾气浓厚程度确定全局大气光和透射率,包括:
5.根据权利要求4所述的基于高分辨率遥感图像的秸秆还田区域快速分割方法,其特征在于,基于雾气浓厚程度确定边缘像素点,包括:
6.根据权利要求4所述的基于高分辨率遥感图像的秸秆还田区域快速分割方法,其特征在于,基于滤波处理后的暗通道图像确定全局大气光,包括:
7.根据权利要求4所述的基于高分辨率遥感图像的秸秆还田区域快速分割方法,其特征在于,基于滑动窗口中像素点对应的雾气浓厚程度和全局大气光计算得到每一像素点的透射率,包括:
8.根据权利要求1所述的基于高分辨率遥感图像的秸秆还田区域快速分割方法,其特征在于,基于所述全局大气光和透射率对遥感图像进行去雾处理,包括:
9.根据权利要求5所述的基于高分辨率遥感图像的秸秆还田区域快速分割方法,其特征在于,基于梯度矩阵的变化情况确定雾气浓厚程度最大的滑动窗口中每一像素点的边缘概率,包括:
10.根据权利要求5所述的基于高分辨率遥感图像的秸秆还田区域快速分割方法,其特征在于,基于每一像素点的边缘概率确定边缘像素点,包括:
技术总结
本申请涉及图像处理领域,提供基于高分辨率遥感图像的秸秆还田区域快速分割方法,包括:获取田地对应的遥感图像,并将遥感图像转化为灰度图像;基于所述灰度图像中像素点的灰度值计算雾气浓厚程度;基于所述雾气浓厚程度确定全局大气光和透射率;基于所述全局大气光和透射率对遥感图像进行去雾处理,基于去雾处理后的图像对还田区域田地进行分割。该方法能够准确的对图像进行去雾处理,实现更理想的去雾效果,提高还田区域分割效率。
技术研发人员:姚海立,刘海,魏祥圣
受保护的技术使用者:山东爱福地生物股份有限公司
技术研发日:
技术公布日:2024/1/14
- 还没有人留言评论。精彩留言会获得点赞!