基于视觉成像的智能医药生产线的定位优化系统及方法
本发明涉及自动化控制,尤其涉及基于视觉成像的智能医药生产线的定位优化系统及方法。
背景技术:
1、近年来,随着全球经济逐渐复苏,人口总量持续增长以及社会老龄化程度的提高,全球医药市场规模保持平稳增长。
2、为了增加医疗生产效率,医药生产自动化生产流程为配药、灌装-封口、异物检测、杀菌及最后的分拣包装。
3、在医药灌装封口环节,传统的医药灌封装备智能化水平不高,兼容性较差。其多运用plc来控制固定位置间的重复动作,当药瓶、瓶塞、瓶盖位置出现偏差时,会使灌封工序任务不能顺利完成。当生产的药品种类有所变换时,需要对设备重新调试才能继续运作。并且,由于plc硬件性能的限制,其极易产生的误差已日益无法符合高精度、高品质的生产标准,因此,基于视觉引导的医药灌封机器人在医药工业有了广泛应用。随着视觉引导机器人的广泛应用,灌装容器的检测定位研究也随之增加。由于工业现场环境复杂,已有的视觉定位算法在复杂工业环境中仍存在不足,亟待研究一种适合工业现场复杂环境的视觉定位算法。
4、为此,本发明提出基于视觉成像的智能医药生产线的定位优化系统及方法,旨在解决现有技术中定位精度低,运行可靠性差的问题。
技术实现思路
1、本发明的目的是为了解决现有技术中存在的缺点,而提出的基于视觉成像的智能医药生产线的定位优化系统及方法。
2、为了实现上述目的,本发明采用了如下技术方案:
3、基于视觉成像的智能医药生产线的定位优化系统,包括机器人、装载在机器人上用于采集图像信息的图像采集器以及可控制机器人动作的集成控制系统,所述的集成控制系统包括相互通讯连接的图像捕捉单元、图像采集与数字化单元、图像处理与分析单元和决策执行与控制单元;
4、所述的图像捕捉单元与图像采集器通过数据电缆通讯连接,用于操控图像采集器中的镜头捕捉样品位置和角度,并将捕捉到的图像即时传送到图像采集与数字化单元进行数字化处理,形成特定数字坐标系,并将该特定数字坐标系的数据即时传送到图像处理与分析单元进行对比分析;
5、图像处理与分析单元把分析的数据结果传送至决策执行与控制单元,决策执行与控制单元根据传送过来的数据结果控制机器人做出位置矢量调整和优化动作。
6、优选地:图像采集器包括图像采集模块,所述图像采集模块为工业相机、摄像机或单独取像镜头,所述图像采集模块采用eye-in-hand的安装方式安装于机器人的机械部上。
7、优选地:图像采集器还包括光源,所述光源为条形光源、环形光源和背光源中的其中一种,所述光源安装于图像采集模块的下方。
8、优选地:所述图像采集模块采用触发拍照的方式,光源采用频闪方式。
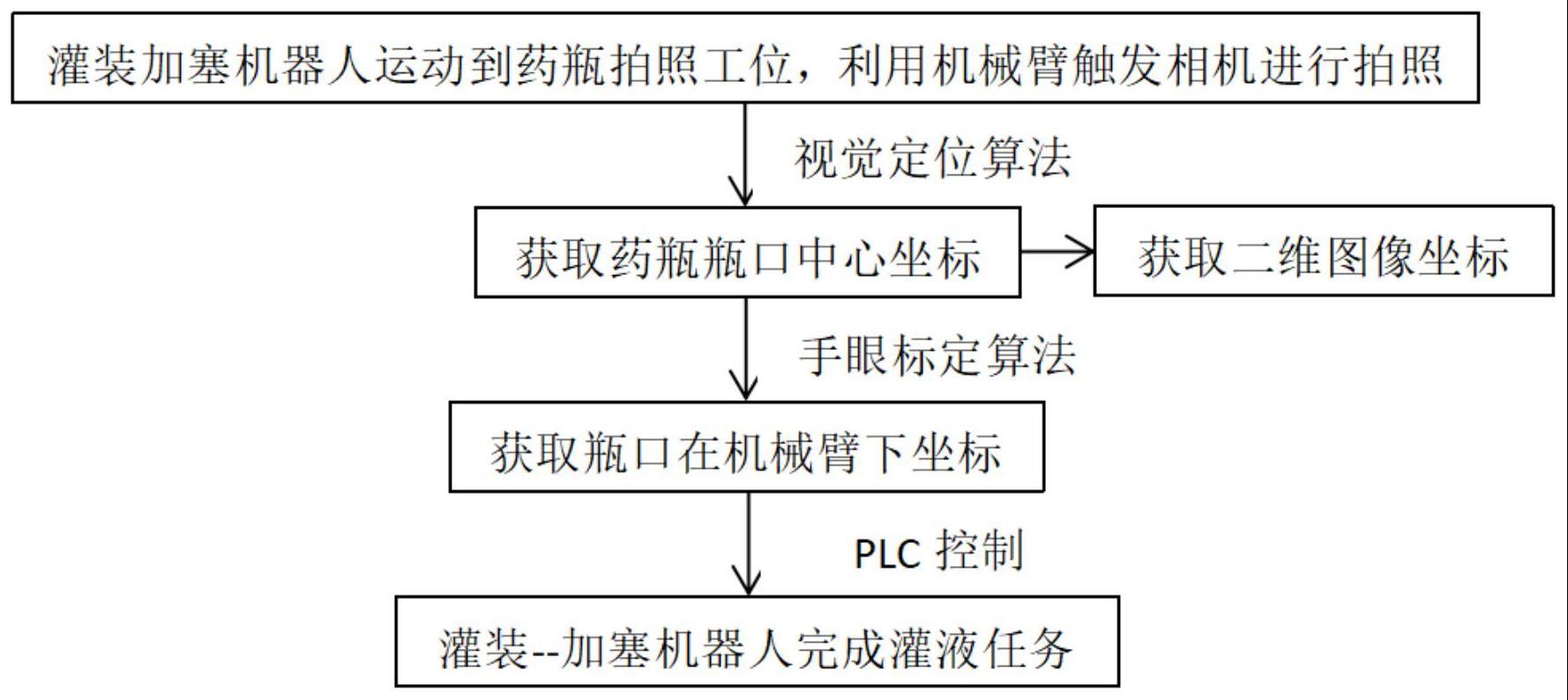
9、基于视觉成像的智能医药生产线的定位优化方法,包括以下步骤:
10、s1:机器人运行到药瓶拍照工位,利用机械臂触发光源频闪和图像采集模块进行拍照;
11、s2:拍照图像经过图像采集与数字化单元处理,获取二维图像坐标;
12、s3:图像处理与分析单元对于图像分析,获取瓶口在机械臂下的坐标;
13、s4:决策执行与控制单元控制设备进行灌装和加塞。
14、优选地:所述s3步骤中,具体包括以下步骤:
15、s31:图像输入图像处理与分析单元后,首先对图像进行预处理;
16、s32:对预处理的图像进行canny边缘检测;
17、s33:随后对边缘检测后的图像采用计算算法计算出瓶口、瓶盖、瓶塞的圆心坐标即可。
18、优选地:所述s31步骤中,图像预处理包括双边滤波去燥和gamma变换图像增加。
19、优选地:所述s33步骤中,计算算法采用基于kmeans++的聚类圆拟合算法。
20、优选地:所述基于kmeans++的聚类圆拟合算法计算瓶口、瓶盖、瓶塞的圆心坐标包括以下步骤:
21、s331:首先利用重心法以及径向扫描获取外边缘点;
22、s332:利用中垂线相交法将外边缘点映射到圆心附近,构成圆心类;
23、s333:对圆心类进行集合聚类,分为噪点类集合和圆心类集合;
24、s334:将噪点类集合设计,将圆心类集合拟合圆处理即可。
25、优选地:所述s334中,采用最小二乘法将圆心类集合拟合圆处理,其具体步骤如下如下:
26、s3341:对于每个聚类中心,将其周围的数据点按照距离排序,选取距离最远的点作为圆上的点;
27、s3342:根据所选的圆上点的坐标,计算圆心的初始值
28、s3343:利用最小二乘法求解圆心的最优值,最小二乘法的目标是最小化所有圆上点到圆心的距离的平方和,即使得所有点到圆心的距离误差的平方和最小
29、s3344:根据求解得到的圆心坐标,重新计算圆上点的坐标,并重新进行最小二乘法求解,直到圆心的坐标不再改变或达到预设的迭代次数为止;
30、s3345最后得到的圆心坐标和半径就是聚类圆拟合算法中所求的圆的参数。
31、本发明的有益效果为:
32、1.本发明通过设置光源对瓶口、瓶盖、瓶塞打光,增加成像和背景的对比度,最大限度的保留凸出边缘和区域信息,并且随后对图像进行预处理,再通过基于kmeans++的圆拟合算法拟合出圆,从而实现精准定位,增加了运行可靠性。
33、2.本发明,通过在基于kmeans++的圆拟合算法拟合出圆的基础上,采用最小二乘法求解圆形,利用次数迭代的方式逐步优化,直至圆心位置不再改变后确定,从而增加了圆心确定的精准度。
技术特征:
1.基于视觉成像的智能医药生产线的定位优化系统,其特征在于,包括机器人、装载在机器人上用于采集图像信息的图像采集器以及可控制机器人动作的集成控制系统,所述的集成控制系统包括相互通讯连接的图像捕捉单元、图像采集与数字化单元、图像处理与分析单元和决策执行与控制单元;
2.根据权利要求1所述的基于视觉成像的智能医药生产线的定位优化系统,其特征在于,图像采集器包括图像采集模块,所述图像采集模块为工业相机、摄像机或单独取像镜头,所述图像采集模块采用eye-in-hand的安装方式安装于机器人的机械部上。
3.根据权利要求2所述的基于视觉成像的智能医药生产线的定位优化系统,其特征在于,图像采集器还包括光源,所述光源为条形光源、环形光源和背光源中的其中一种,所述光源安装于图像采集模块的下方。
4.根据权利要求3所述的基于视觉成像的智能医药生产线的定位优化系统,其特征在于,所述图像采集模块采用触发拍照的方式,光源采用频闪方式。
5.基于视觉成像的智能医药生产线的定位优化方法,其特征在于,包括以下步骤:
6.根据权利要求5所述的基于视觉成像的智能医药生产线的定位优化方法,其特征在于,所述s3步骤中,具体包括以下步骤:
7.根据权利要求6所述的基于视觉成像的智能医药生产线的定位优化方法,其特征在于,所述s31步骤中,图像预处理包括双边滤波去燥和gamma变换图像增加。
8.根据权利要求6所述的基于视觉成像的智能医药生产线的定位优化方法,其特征在于,所述s33步骤中,计算算法采用基于kmeans++的聚类圆拟合算法。
9.根据权利要求8所述的基于视觉成像的智能医药生产线的定位优化方法,其特征在于,所述基于kmeans++的聚类圆拟合算法计算瓶口、瓶盖、瓶塞的圆心坐标包括以下步骤:
10.根据权利要求9所述的基于视觉成像的智能医药生产线的定位优化方法,其特征在于,所述s334中,采用最小二乘法将圆心类集合拟合圆处理,其具体步骤如下:
技术总结
本发明公开了基于视觉成像的智能医药生产线的定位优化系统及方法,涉及自动化控制技术领域;该系统包括机器人、装载在机器人上用于采集图像信息的图像采集器以及可控制机器人动作的集成控制系统,该方法包括:机器人运行到药瓶拍照工位,利用机械臂触发光源频闪和图像采集模块进行拍照,拍照图像经过图像采集与数字化单元处理,获取二维图像坐标。本发明通过设置光源对瓶口、瓶盖、瓶塞打光,增加成像和背景的对比度,最大限度的保留凸出边缘和区域信息,并且随后对图像进行预处理,再通过基于KMeans++的圆拟合算法拟合出圆,从而实现精准定位,增加了运行可靠性。
技术研发人员:胡应坤,邱嘉豪,张东波
受保护的技术使用者:广东工贸职业技术学院
技术研发日:
技术公布日:2024/1/15
- 还没有人留言评论。精彩留言会获得点赞!