一种基于数据驱动的任意群目标外形识别方法
本发明涉及雷达信号处理领域,特别是涉及一种基于数据驱动的任意群目标外形识别方法。适用于无人机集群、蜂群、导弹群等群目标。
背景技术:
1、随着集群概念的提出与发展,集群无人机作为当前军事与民用领域一种热门的技术受到了广泛的关注与研究。但受限于传统目标跟踪的影响,有关集群目标的相关研究几乎全部是模型驱动,产生的椭圆形虽然能够完整地包含所有量测点,但由于其过于笼统,丢失了目标跟踪过程中要求的精确性。
2、如何更为精确地识别群目标外形成为当前目标识别跟踪领域的新热点。现有的方法大多是分别以随机矩阵或者超平面理论或者将二者结合来描述群目标外形。但是现有方法局限于椭圆、矩形等较为简单的模型,忽略了集群目标状态的时变性,不适用于复杂的、难以用简单图形描述的任意集群类型。如何快速精确地识别群目标外形,是群态势感知的关键,对于区分和识别不同集群节点功能、预测集群行动意图具有重要应用价值。
技术实现思路
1、本发明所要解决的技术问题是:
2、为了克服现有方法拟合群目标外形困难的问题,本发明旨在提供一种基于数据驱动的任意群目标外形识别方法。
3、为了解决上述技术问题,本发明采用的技术方案为:
4、一种基于数据驱动的任意群目标外形识别方法,其特征在于包括:
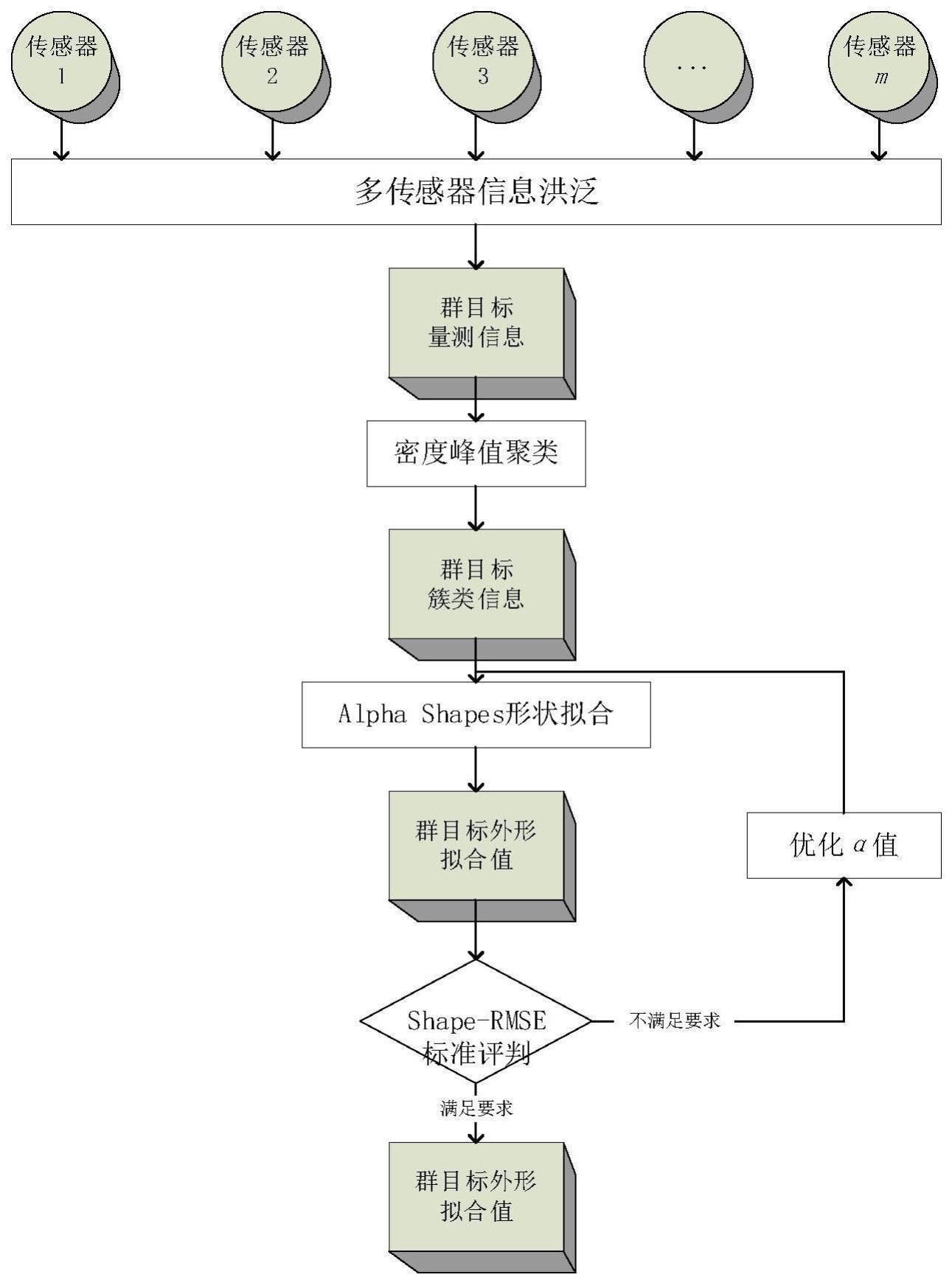
5、通过多个传感器获取信息,将信息通过洪泛进行共享,获得当前时刻视场内的所有观测信息;
6、采用密度峰值聚类算法对量测信息进行过滤;
7、通过alpha shapes算法进行边缘提取,获取目标外形。
8、本发明进一步的技术方案:所述获得当前时刻视场内的所有观测信息具体为:
9、各传感器获得的信息按照式(1)通过洪泛进行共享,获得当前时刻t视场内的所有观测信息:
10、
11、式中,代表t时刻传感器i获得的量测信息,表示除传感器i外的其他传感器集,a/b表示两个集合之间的差集,即a中有而b中没有的所有元素。
12、本发明进一步的技术方案:所述采用密度峰值聚类算法对量测信息进行过滤具体为:
13、计算局部密度与相对距离,在遍历获得所有量测点的局部密度和相对距离后,绘制决策图,选取局部密度与相对距离值最大的点,即同时远离横纵坐标轴的点作为聚类中心点;在找到中心点后,将剩余量测点分配给密度比它高的最近量测点所在簇,形成多个从密度峰值出发的树状结构,每一个树状结构代表一个类簇。
14、本发明进一步的技术方案:计算局部密度与相对距离具体为:
15、局部密度采用截断核函数或者高斯核函数进行运算,分别如式(2)与式(3)所示;相对距离如式(4)所示:
16、
17、
18、
19、dij=||(xi-xj)2|| (5)
20、式中,n表示传感器量测点数;ρ为局部密度阈值;dij表示量测点i与j之间的欧氏距离,如式(5)所示;dc为截断距离;
21、本发明进一步的技术方案:所述通过alpha shapes算法进行边缘提取具体为:
22、首先计算各量测点之间的间距,构成距离矩阵ln×n;再根据距离由小到大排序,取在前百分之十位置的值为半径α,以2α作为滚动圆的直径;而后,经过某两点xm,xn且半径为r的滚动圆分别为c1,c2,则圆心计算公式如式(6)所示:
23、
24、式中,对该滚动圆进行判断,当滚动圆c1,c2内均存在其他点时,认为xm,xn不是边界点;而当c1,c2中存在一个圆内并未有其他点时,则认为xm,xn为一个边界点对,其连接线li为边界线段。
25、一种基于数据驱动的任意群目标外形识别方法的性能验证方法,其特征在于选择半径均方根误差作为比较指标,所述的半径均方根误差为:
26、
27、式中,n为群目标外形拟合产生的边缘点数,φ为极坐标角度,rest(φ)表示当角度为φ时群目标外形的拟合值,rtrue(φ)表示当角度为φ时群目标外形的真实值;
28、shape-rmse越小则代表该算法拟合群目标外形的效果越好。
29、一种计算机系统,其特征在于包括:一个或多个处理器,计算机可读存储介质,用于存储一个或多个程序,其中,当所述一个或多个程序被所述一个或多个处理器执行时,使得所述一个或多个处理器实现上述的方法。
30、一种计算机可读存储介质,其特征在于存储有计算机可执行指令,所述指令在被执行时用于实现上述的方法。
31、本发明的有益效果在于:
32、本发明提供的一种基于数据驱动的任意群目标外形识别方法,该方法旨在尝试在当前时刻的大量量测中找到能够描述群目标外形的边缘点,从而拟合出群目标的精准外形。通过上述方式,本发明能够实现在较短时间内拟合出更高精度的群目标外形,无需先验模型信息,克服传统群目标外形方法中的先建立模型再拟合外形的算法,从而完成群目标外形拟合。该方法巧妙地运用当前时刻雷达量测数据,通过传感器间信息洪泛与聚类算法提取出群目标所在区域,获得聚类簇,进而采用alpha shapes算法对各聚类簇进行拟合,通过拟合得到的边缘对目标外形进行描述。该方法设计简便,精度更高。
技术特征:
1.一种基于数据驱动的任意群目标外形识别方法,其特征在于包括:
2.根据权利要求1所述的基于数据驱动的任意群目标外形识别方法,其特征在于,所述获得当前时刻视场内的所有观测信息具体为:
3.根据权利要求1所述的基于数据驱动的任意群目标外形识别方法,其特征在于,所述采用密度峰值聚类算法对量测信息进行过滤具体为:
4.根据权利要求3所述的基于数据驱动的任意群目标外形识别方法,其特征在于,所述计算局部密度与相对距离具体为:
5.根据权利要求1所述的基于数据驱动的任意群目标外形识别方法,其特征在于,所述通过alpha shapes算法进行边缘提取具体为:
6.一种基于数据驱动的任意群目标外形识别方法的性能验证方法,其特征在于选择半径均方根误差作为比较指标,所述的半径均方根误差为:
7.一种计算机系统,其特征在于包括:一个或多个处理器,计算机可读存储介质,用于存储一个或多个程序,其中,当所述一个或多个程序被所述一个或多个处理器执行时,使得所述一个或多个处理器实现权利要求1所述的方法。
8.一种计算机可读存储介质,其特征在于存储有计算机可执行指令,所述指令在被执行时用于实现权利要求1所述的方法。
技术总结
本发明涉及一种基于数据驱动的任意群目标外形识别方法,属于雷达信号处理领域。通过传感器间信息洪泛与聚类算法提取出群目标所在区域,获得聚类簇,进而采用Alpha Shapes算法对各聚类簇进行拟合,通过拟合得到的边缘对目标外形进行描述。本发明方法能够实现在较短时间内拟合出更高精度的群目标外形,无需先验模型信息,克服传统群目标外形方法中的先建立模型再拟合外形的算法,从而完成群目标外形拟合;设计简便,精度更高。
技术研发人员:李天成,严瑞波,李固冲
受保护的技术使用者:西北工业大学
技术研发日:
技术公布日:2024/1/15
- 还没有人留言评论。精彩留言会获得点赞!