一种爬架机器人智能仓储系统的布局设计优化方法
本发明涉及管理科学与工程领域,更准确地说,涉及一种爬架机器人智能仓储系统的布局设计优化方法。
背景技术:
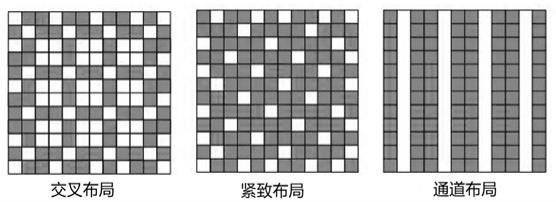
1、仓库设计需要平衡仓储占地面积和仓储吞吐量。新一代爬架机器人拥有灵活的布局模式。紧致的布局虽然可以减少占地面积,但由于仓储内机器人通道较少且较为狭窄,机器人会发生死锁或拥堵的情况。
2、仓储系统的衡量标准包括:系统的吞吐量;系统的运行成本;系统的能耗。如何根据具体的场景选择合适的布局是影响系统效率的难题。本发明帮助仓储决策者判断系统中的交叉布局、紧致布局以及传统的基于通道的布局在不同场景下的性能。传统的方法很难模拟复杂系统的运作方式,因此,有必要采取一种新的方法,帮助决策者根据具体的需求,选择合适的布局,优化爬架机器人智能仓储系统的运行效率。
技术实现思路
1、本发明为解决上述问题,提出了一种爬架机器人智能仓储系统的布局设计优化方法,通过构建排队网络模型,在考虑机器人拥堵预防策略和机器人充电的场景下,建立成本最小化模型,使用聚合法对交叉布局、紧致布局以及传统的基于通道的布局下的各个环节进行定量分析,对系统性能的吞吐量、运行成本和能耗进行评估,提高在不同布局下系统的运行效率,提高吞吐量,降低运行成本与能耗。
2、本发明通过以下技术方案来实现:
3、一种爬架机器人智能仓储系统的布局设计优化方法,包括以下步骤:
4、s1、建立带有机器人拥堵预防策略的闭环排队网络模型并用聚合法求解;
5、s2、确定服务时间;
6、s3、确定包括机器人充电概率在内的每台服务器的访问概率;
7、s4、将解析结果与仿真结果进行误差分析,判断模型的准确性;
8、s5、以系统的年运行成本最小化为目标,以系统的存储量、吞吐量为约束条件,建立成本最小化模型mindm(sm,δm),以此比较交叉布局、紧致布局、通道布局这三种布局之间的存储量与吞吐量间的权衡关系模型。
9、进一步的,s1中拥堵预防策略具体是指:
10、将货物分配给可用的机器人后,机器人沿着外部垂直通道从工作站移动到仓库顶部;到达仓库顶部时,机器人从外部垂直通道(x1,y1,γ+1)的出口移动到指定垂直通道(x2,y2,γ+1)的入口;当机器人到达指定通道入口,机器人检查通道是否可用,当指定通道内没有机器人在其内部工作时进入;机器人首先存储前一个货物,然后取到下一个请求的货物,之后机器人移动至其中一个工作站,每个工作站有一个分拣员,当机器人到达工作站时,它在缓冲区中排队,等待服务;当货物在工作站被分拣后,机器人会检查它自身的电池电量。
11、进一步的,s2中服务时间包括机器人在外部垂直通道服务时间ui、机器人在顶层的服务时间ux1,y1,x2,y2、目标垂直通道服务时间ut、仓库底层服务时间ux2,y2,x3,y3。
12、进一步的,s3中每台服务器的访问概率包括机器人访问目标垂直通道的概率q(x,y)、机器人在完成当前指令后必须充电的概率qd。
13、进一步的,q(x,y)的计算公式如下:
14、
15、式中,(x,y)是目标垂直通道的坐标,α是x方向上的通道数,β是y方向上的通道数,u(x,y)是概率,c(j,k)用于标识垂直通道(j,k)是垂直移动通道还是货架;
16、
17、进一步的,其中充电的概率qd需结合概率性质与聚合法,用迭代的方式求解;
18、qd的公式如下:
19、
20、式中s为机器人数量,ui为吞吐量,us为机器人在一个周期内消耗能量的预期时间,fu为机器人在一个周期内的能耗,ub为一个机器人可以运行的最长时间,f为机器人每单位时间所能提供的能量。
21、进一步的,ui使用迭代平均近似算法计算,具体为:通过将qd设置为0到1之间的任意值来初始化它,对于qd的第一个值,使用近似平均值估计算法找到ui的第一个值,然后使用qd计算公式和近似平均值估计算法迭代更新qd的值,设表示当前迭代中电池耗尽的概率,表示最后一次迭代电池耗尽的概率,当时,算法终止,用来近似qd的值;
22、由于机器人共享工作站和外部垂直通道,所以qa是机器人被分配到其中一个工作站的概率,qi是机器人访问外部垂直通道的概率,a是工作站的数量,闭环排队网络通过近似平均值估计算法求解,同时更新qd。
23、进一步的,s5中,建立成本最小化模型的过程如下:
24、系统的年运行成本包括机器人运行成本、占地面积成本和货架运行成本,固定系统的占地面积;
25、成本最小化模型有两个性能约束:系统的存储容量应大于存储容量约束t,系统的最大吞吐量应大于所需的最小吞吐量ui,决策变量包括在布局m下的机器人数量sm和布局m下的系统层数δm,布局m下的成本最小化模型如下:
26、mindm(sm,δm)=ds*sm+de*em+dt*bm*δm
27、
28、式中,m为交叉布局或紧致布局或通道布局,ds是一台机器人平摊至每年的运行和维护成本,de是存储单位空间的年运维成本,em是布局m下所需的空间,dt是一个货架位置的年成本,bm是布局m下一层中存储货架位置的数量,uim(sm,δm)是布局m、机器人为sm、层数为δm的系统最大吞吐量。tm(sm,δm)是布局m、机器人为sm、层数为δm的系统存储容量。
29、本发明的有益效果在于:
30、(1)在大多数情况下,可以帮助仓储决策者以最小化年运行成本为目标选择相应的布局;
31、(2)在给定存储容量、给定机器人数量和给定货架布局占地面积的情况下,帮助仓储决策者选择吞吐量最高的布局;
32、(3)帮助仓储决策者在存储和吞吐量一定的条件下,选择能耗更低,年运行成本更低的布局;
33、综上所述,本发明提供的爬架机器人智能仓储系统的优化方法,充分考虑了机器人工作的所有流程,评估方法贴近现实,评估结果更为准确。本发明开发了排队网络模型来研究具有不同布局(紧致、交叉和基于通道)的爬架机器人智能仓储系统的吞吐量,同时还计算了能耗。
技术特征:
1.一种爬架机器人智能仓储系统的布局设计优化方法,其特征在于:包括以下步骤:
2.根据权利要求1所述的一种爬架机器人智能仓储系统的布局设计优化方法,其特征在于:s1中拥堵预防策略具体是指:
3.根据权利要求1所述的一种爬架机器人智能仓储系统的布局设计优化方法,其特征在于:s2中服务时间包括机器人在外部垂直通道服务时间ui、机器人在顶层的服务时间ux1,y1,y2、目标垂直通道服务时间ut、仓库底层服务时间ux2,y2,x3,y3。
4.根据权利要求1所述的一种爬架机器人智能仓储系统的布局设计优化方法,其特征在于:s3中每台服务器的访问概率包括机器人访问目标垂直通道的概率q(x,y)、机器人在完成当前指令后必须充电的概率qd。
5.根据权利要求4所述的一种爬架机器人智能仓储系统的布局设计优化方法,其特征在于:q(x,y)的计算公式如下:
6.根据权利要求4所述的一种爬架机器人智能仓储系统的布局设计优化方法,其特征在于:其中充电的概率qd需结合概率性质与聚合法,用迭代的方式求解;
7.根据权利要求6所述的一种爬架机器人智能仓储系统的布局设计优化方法,其特征在于:ui使用迭代平均近似算法计算,具体为:通过将qd设置为0到1之间的任意值来初始化它,对于qd的第一个值,使用近似平均值估计算法找到ui的第一个值,然后使用qd计算公式和近似平均值估计算法迭代更新qd的值,设表示当前迭代中电池耗尽的概率,表示最后一次迭代电池耗尽的概率,当时,算法终止,用来近似qd的值;
8.根据权利要求1所述的一种爬架机器人智能仓储系统的布局设计优化方法,其特征在于:s5中,建立成本最小化模型的过程如下:
技术总结
本发明公开一种爬架机器人智能仓储系统的布局设计优化方法,通过构建排队网络模型,在考虑机器人拥堵和机器人充电的场景下建立成本最小化模型,使用聚合法对不同布局下仓储运行管理的各个环节进行定量分析,对仓储系统性能进行评估,提高在不同布局下系统的运行效率,提高仓储吞吐量,降低运行成本与能耗。本发明提出了不同布局下系统存储量和吞吐量间的权衡模型,该模型可准确计算相同存储量下不同布局的吞吐量,帮助决策者在给定存储量、给定机器人数量和给定货架布局占地面积的情况下,选择吞吐量最高的布局,还可帮助仓储决策者在存储量和吞吐量一定的条件下,选择能耗更低,年运行成本更低的布局。
技术研发人员:陈婉莹,施安楠,伍蓓
受保护的技术使用者:浙江工商大学
技术研发日:
技术公布日:2024/1/16
- 还没有人留言评论。精彩留言会获得点赞!