一种危险区域的安全防护方法和系统与流程
本申请涉及安全管理,尤其涉及一种危险区域的安全防护方法和系统。
背景技术:
1、安全问题是各领域管控的核心问题,对于试验室或工厂生产车间等特殊场景,误入危险区域容易造成重大安全事故。
2、目前为了避免误入危险区域,主要的防护措施是物理防护,如通过围栏隔绝或者通过警示牌提醒等,其缺点是无法防止人员无视围栏及警示牌靠近危险源。另外在一些特殊场景中,例如场地中有多个设备相互独立工作,操作人员需要在某一台设备旁对该设备进行操作,其他设备在正常运转,由于场地等限制因素无法安装物理护栏,操作人员容易进入运转设备附近的危险区。
3、因此,如何对危险区域进行安全防护,避免误入危险区域造成安全事故,是有待解决的技术问题。
技术实现思路
1、本申请的主要目的在于提供一种危险区域的安全防方法和系统,旨在解决操作人员容易进入运转设备附近的危险区从而导致安全事故技术问题。
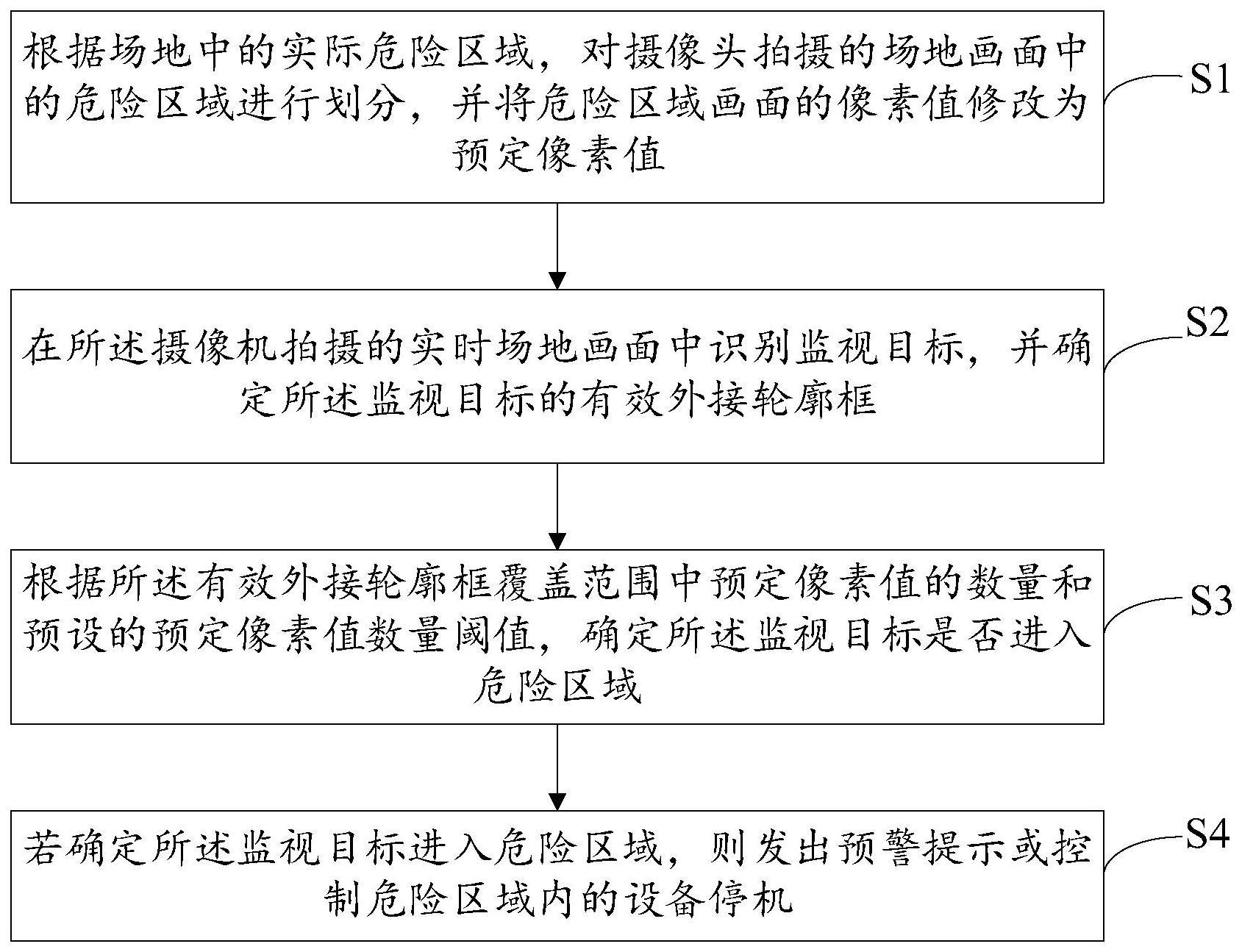
2、第一方面,本申请提供一种危险区域的安全防护方法,所述方法包括以下步骤:根据场地中的实际危险区域,对摄像头拍摄的场地画面中的危险区域进行划分,并将危险区域画面的像素值修改为预定像素值;
3、在所述摄像机拍摄的实时场地画面中识别监视目标,并确定所述监视目标的有效外接轮廓框;
4、根据所述有效外接轮廓框覆盖范围中预定像素值的数量和预设的预定像素值数量阈值,确定所述监视目标是否进入危险区域;
5、若确定所述监视目标进入危险区域,则发出预警提示或控制危险区域内的设备停机。
6、一些实施例中,在所述摄像机拍摄的实时场地画面中识别监视目标,并确定所述监视目标的有效外接轮廓框,包括:
7、通过预设的ai神经网络模型在所述实时场地画面中识别监视目标,并生成所述监视目标的ai识别外接轮廓框;
8、通过预设的移动侦测模型在所述实时场地画面中识别移动目标,并生成移动目标的移动识别外接轮廓框;
9、取所述ai识别外接轮廓框和所述移动识别外接轮廓框的相交区域作为所述有效外接轮廓框。
10、一些实施例中,通过预设的ai神经网络模型在所述实时场地画面中识别监视目标,包括:
11、将所述摄像机拍摄的实时场地视频流分帧输入所述ai神经网络模型中,以使所述ai神经网络模型在所述实时场地画面中识别监视目标;
12、其中,所述ai神经网络模型为通过所述摄像机拍摄的m张场地画面进行训练后的yolov5模型,所述ai神经网络模型的置信度在0.3至0.45之间。
13、一些实施例中,通过预设的移动侦测模型在所述实时场地画面中识别移动目标,包括:
14、将所述摄像机拍摄的实时场地视频流中的最后一帧画面与倒数第n张画面中每个对应像素点的像素值做差值运算,将像素值存在差异的像素点集合作为所述移动目标。
15、一些实施例中,根据场地中的实际危险区域,对摄像头拍摄的场地画面中的危险区域进行划分,并将危险区域画面的像素值修改为预定像素值,包括:
16、根据场地中的一级危险区域标记和二级危险区域标记,将所述摄像头拍摄的场地画面划分为一级危险区域画面、二级危险区域画面和其他区域画面:
17、将所述一级危险区域画面用灰色进行覆盖,使得所述一级危险区域画面对应的画面区域为第一像素值;
18、将所述二级危险区域画面用白色进行覆盖,使得所述二级危险区域画面对应的画面区域为第二像素值;
19、将所述其它区域画面用黑色进行覆盖,使得所述其它区域画面对应的画面区域为第三像素值。
20、一些实施例中,所述根据所述有效外接轮廓框覆盖范围中预定像素值的数量和预设的预定像素值数量阈值,确定所述监视目标是否进入危险区域,还包括:
21、将所述摄像机拍摄的实时场地画面转化为单通道灰度图,并确定所述有效外接轮廓框覆盖范围中所述第一像素值的数量和所述第二像素值的数量;
22、若所述有效外接轮廓框覆盖范围中第一像素值的数量大于或等于预设的第一像素值数量阈值,第二像素值的数量小于预设的第二像素值数量阈值,则确定所述监测目标进入所述一级危险区域;
23、若所述有效外接轮廓框覆盖范围中第二像素值的数量大于或等于所述第二像素值数量阈值时,确定所述监测目标进入所述二级危险区域。
24、一些实施例中,在确定所述监视目标进入危险区域后发出预警提示或控制危险区域内的设备停机,包括:
25、当确定所述监视目标进入所述一级危险区域时,控制设置与场地中的警报器发出预警提示,并截图储存所述监视目标进入所述一级危险区域的画面,在所述监视目标离开所述一级危险区域后控制警报器停止预警提示;
26、当确定所述监视目标进入所述二级危险区域时,控制所述二级危险区域内的设备停机,并截图储存所述监视目标进入所述二级危险区域的画面,并在所述监视目标离开所述二级危险区域后控制所述二级危险区域内的设备开启。
27、一些实施例中,所述摄像机设置于所述场地的上方,其拍摄视野包括完整的目标监控区域。
28、第二方面,本申请还提供一种危险区域的安全防护系统,所述系统包括:
29、划分模块,其用于根据场地中的实际危险区域,对摄像头拍摄的场地画面中的危险区域进行划分,并将危险区域画面的像素值修改为预定像素值;
30、识别模块,其用于在所述摄像机拍摄的实时场地画面中识别监视目标,并确定所述监视目标的有效外接轮廓框;
31、确定模块,其用于根据所述有效外接轮廓框覆盖范围中预定像素值的数量和预设的预定像素值数量阈值,确定所述监视目标是否进入危险区域;
32、保护模块,其用于若确定所述监视目标进入危险区域,则发出预警提示或控制危险区域内的设备停机。
33、一些实施例中,所述识别模块还用于:
34、通过预设的ai神经网络模型在所述实时场地画面中识别监视目标,并生成所述监视目标的ai识别外接轮廓框;
35、通过预设的移动侦测模型在所述实时场地画面中识别移动目标,并生成移动目标的移动识别外接轮廓框;
36、取所述ai识别外接轮廓框和所述移动识别外接轮廓框的相交区域作为所述有效外接轮廓框。
37、本申请提供一种危险区域的安全防护方法和系统,通过根据场地中的实际危险区域,对摄像头拍摄的场地画面中的危险区域进行划分,并将危险区域画面的像素值修改为预定像素值;在所述摄像机拍摄的实时场地画面中识别监视目标,并确定所述监视目标的有效外接轮廓框;根据所述有效外接轮廓框覆盖范围中预定像素值的数量和预设的预定像素值数量阈值,确定所述监视目标是否进入危险区域;若确定所述监视目标进入危险区域,则发出预警提示或控制危险区域内的设备停机,实现了实时的对监视目标是否进入危险区域进行准确的判断,并且能够对误入危险区域的监视目标进行有效提醒,控制危险区域内的设备停机,从而有效地避免安全事故的发生。
技术特征:
1.一种危险区域的安全防护方法,其特征在于,包括:
2.根据权利要求1所述的危险区域的安全防护方法,其特征在于,在所述摄像机拍摄的实时场地画面中识别监视目标,并确定所述监视目标的有效外接轮廓框,包括:
3.根据权利要求2所述的危险区域的安全防护方法,其特征在于,通过预设的ai神经网络模型在所述实时场地画面中识别监视目标,包括:
4.根据权利要求2所述的危险区域的安全防护方法,其特征在于,通过预设的移动侦测模型在所述实时场地画面中识别移动目标,包括:
5.根据权利要求1所述的危险区域的安全防护方法,其特征在于,根据场地中的实际危险区域,对摄像头拍摄的场地画面中的危险区域进行划分,并将危险区域画面的像素值修改为预定像素值,包括:
6.根据权利要求5所述的危险区域的安全防护方法,其特征在于,所述根据所述有效外接轮廓框覆盖范围中预定像素值的数量和预设的预定像素值数量阈值,确定所述监视目标是否进入危险区域,还包括:
7.根据权利要求6所述的危险区域的安全防护方法,其特征在于,在确定所述监视目标进入危险区域后发出预警提示或控制危险区域内的设备停机,包括:
8.根据权利要求1所述的危险区域的安全防护方法,其特征在于,
9.一种危险区域的安全防护系统,其特征在于,包括:
10.根据权利要求9所述的危险区域的安全防护系统,其特征在于,所述识别模块还用于:
技术总结
本申请公开了一种危险区域的安全防护方法和系统,通过根据场地中的实际危险区域,对摄像头拍摄的场地画面中的危险区域进行划分,并将危险区域画面的像素值修改为预定像素值;在所述摄像机拍摄的实时场地画面中识别监视目标,并确定所述监视目标的有效外接轮廓框;根据所述有效外接轮廓框覆盖范围中预定像素值的数量和预设的预定像素值数量阈值,确定所述监视目标是否进入危险区域;若确定所述监视目标进入危险区域,则发出预警提示或控制危险区域内的设备停机,实现了实时的对监视目标是否进入危险区域进行准确的判断,并且能够对误入危险区域的监视目标进行有效提醒,控制危险区域内的设备停机,从而有效地避免安全事故的发生。
技术研发人员:李强,袁慧,谭川,张远骏,黄太强,孙金惠,刘珣灿
受保护的技术使用者:东风商用车有限公司
技术研发日:
技术公布日:2024/1/15
- 还没有人留言评论。精彩留言会获得点赞!