一种面向自动驾驶测试的场景自演绎引擎设计方法
本发明涉及自动驾驶测的,特别涉及一种面向自动驾驶测试的场景自演绎引擎设计方法。
背景技术:
1、自动驾驶技术,作为最具革命性的交通与运载工程技术,在提高交通运输系统的安全性、机动性和可持续性等方面具有巨大的潜力。不仅如此,自动驾驶将带动智能芯片、5g通信、电子传感、整车制造、出行服务等多个产业链的发展,具有广阔的应用前景和商业价值。
2、然而,囿于自动驾驶潜在的安全性问题,自动驾驶技术仍未能实现大规模落地应用。目前,仅有少量配备低等级(l0-l2)辅助驾驶功能的汽车可在真实公开道路上行驶。出于对安全性的考量,若一款配有高等级自动驾驶功能(l3-l5)的汽车要上路行驶,至少需要完成里程数以亿计的测试和验证。单是对初版的自动驾驶原型车进行测试验证就需要花费数年时间,更不必说,自动驾驶汽车向高等级的演进过程中还需要不断迭代更新,而每次迭代又需要完成相同的巨量测试。耗时耗力的低效测试技术极度延缓了自动驾驶的大规模落地应用。
3、目前,为了加速自动驾驶测试,基于场景的仿真测试备受关注。其能够借助虚拟测试平台高效地测试车辆功能系统的表现,节约了成本,但由于很难对车辆之间的交互行为进行还原复现,使得场景不够真实,可能影响测试结果的可靠性。
技术实现思路
1、针对现有技术中存在的不足之处,本发明的目的是提供一种面向自动驾驶测试的场景自演绎引擎设计方法,复现交通参与者间的交互博弈,真实的还原了交通场景,使得基于场景的自动驾驶测试真实可靠。为了实现根据本发明的上述目的和其他优点,提供了一种面向自动驾驶测试的场景自演绎引擎设计方法,包括:
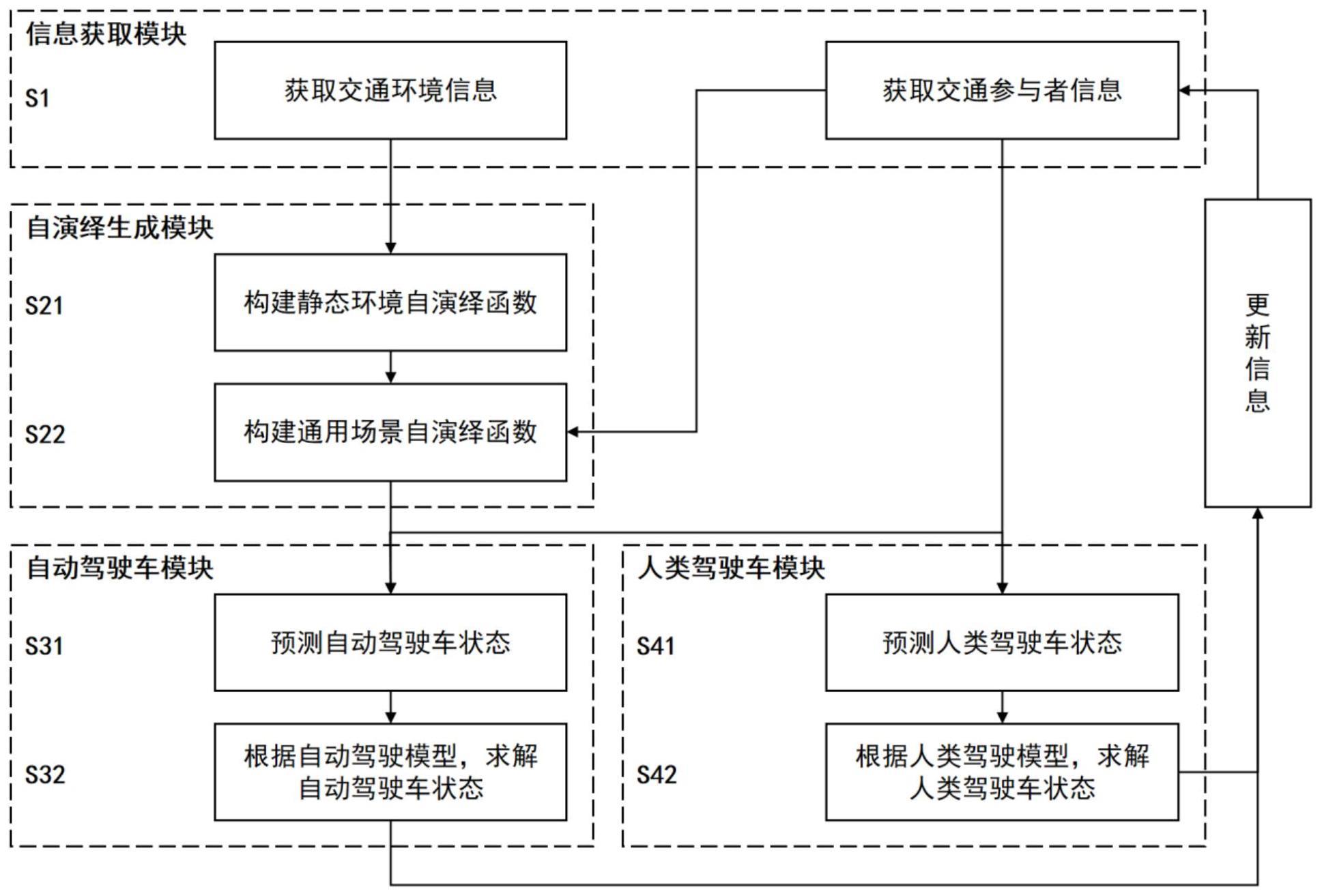
2、s1、通过信息获取模块获取交通环境信息与交通参与者信息;
3、s2、通过自演绎生成模块接收步骤s1中信息构建静态环境自演绎函数与通用场景自演绎函数;
4、s3、通过自动驾驶车模块接收场景内自动驾驶车辆当前状态信息和与之存在交互的车辆信息,并通过自动驾驶算法模型,计算得到自动驾驶车辆的下一步状态信息,并输出给信息获取模块;
5、s4、通过人类驾驶车模块接收场景内人类驾驶车辆当前状态信息与之存在交互的车辆信息,并通过人类驾驶算法模型,计算得到人类驾驶车辆的下一步状态信息,并输出给信息获取模块。
6、优选的,步骤s1通过信息获取模块获取场景内的静态交通环境信息、交通参与者信息及更新信息,信息获取模块将获取的静态交通环境信息和初始的交通参与者信息输出给自演绎生成模块,信息获取模块将获取的初始的交通参与者信息和后续不断更新的参与者信息传递给自动驾驶车模块与人类驾驶车模块。
7、优选的,步骤s2中通用的场景自演绎函数具体为:
8、
9、其中,ω为交通参与者的索引集合,ω={1,2,3,...};f0~f|ω|是静态交通场景和交通参与者的自演绎函数;
10、f为场景内所有要素的映射关系,具体为:
11、
12、其中,xs为静态交通环境的状态集合;xd(ti+1)为动态交通参与者在ti+1时刻的状态集合;
13、f0为静态交通环境的自演绎函数,为:
14、xs=f0(xs,xd(ti))
15、fω为第ω个交通参与者的自演绎函数,可以生成这个交通参与者的状态,其为:
16、
17、其中,为第ω个交通参与者在ti+1时刻的状态;
18、由于xd(ti)为所有交通参与者在ti时刻的状态集合,其为:
19、
20、因此,可以被改写作:
21、
22、优选的,步骤s3中预测自动驾驶车辆状态,其具体为:
23、
24、
25、其中,ωav为自动驾驶车的索引;ωi为与自动驾驶车有交互的交通参与者的索引;
26、通过自动驾驶模型生成自动驾驶车辆在未来一段时间的一系列目标状态,其具体为:
27、
28、其中,为生成的第e个自动驾驶车状态,该自动驾驶车状态包括纵向间距、横向间距、车速、航向角;
29、因此,自动驾驶车的状态可自演绎生成,其具体为:
30、
31、与自动驾驶车有交互的交通参与者的未来状态也被预测,其具体为:
32、
33、其中,为生成的第e个交互车状态,交互车状态包括纵向间距、横向间距、车速、航向角。
34、优选的,自动驾驶模型采用基于博弈的自动驾驶优化算法,其建立了一个场景内自动驾驶车与人类驾驶车交互博弈的优化控制模型,优化目标为辆车的成本函数都最小,且博弈的自动驾驶优化算法包括一个自动驾驶车的待优化成本函数和一个存在交互的人类驾驶车的待优化成本函数,该成本函数可描述车辆的驾驶风格与驾驶意图。
35、优选的,步骤s4中预测人类驾驶车辆状态,其具体为:
36、
37、
38、其中,ωhv为人类驾驶车的索引;ωf为驾驶在其前方并存在交互的交通参与者的索引;
39、通过人类驾驶模型生成人类驾驶车辆在下一时间步的目标状态,其具体为:
40、
41、其中,为人类驾驶车在ti+1时刻的纵向位置;为人类驾驶车在ti+1时刻的速度,具体为:
42、
43、
44、其中,为人类驾驶车在ti时刻的加速度。
45、本发明与现有技术相比,其有益效果是:通过获取当前的交通环境信息、交通参与者信息等,构建通用的场景自演绎函数,并通过求解自动驾驶模型和人类驾驶模型,以生成自动驾驶车和人类驾驶车的下一步状态信息,以实现对场景内交通参与者交互状态的模拟,该方法能够精确模拟场景中交通参与者间的交互博弈,自演绎式生成各参与者的状态,真实的还原了交通场景,使得基于场景的测试更加真实可靠。通过设置信息获取模块、自演绎生成模块、自动驾驶车模块和人类驾驶车模块,其中,信息获取模块用于接收和传递各模块所需要的信息,自演绎生成模块用于生成自演绎函数的通用形式,自动驾驶车模块用于接收自动驾驶车辆当前状态信息和输出车辆未来状态信息,人类驾驶车模块用于接收人类驾驶车辆当前状态信息和输出车辆未来状态信息,由此在交通场景,通过对自动驾驶车辆和人类驾驶车辆的状态进行预测,精准的模拟还原了交通参与者之间的交互博弈,实现场景的真实再现,推动了基于场景的自动驾驶测试。
技术特征:
1.一种面向自动驾驶测试的场景自演绎引擎设计方法,其特征在于,包括以下步骤:
2.如权利要求1所述的一种面向自动驾驶测试的场景自演绎引擎设计方法,其特征在于,步骤s1通过信息获取模块获取场景内的静态交通环境信息、交通参与者信息及更新信息,信息获取模块将获取的静态交通环境信息和初始的交通参与者信息输出给自演绎生成模块,信息获取模块将获取的初始的交通参与者信息和后续不断更新的参与者信息传递给自动驾驶车模块与人类驾驶车模块。
3.如权利要求2所述的一种面向自动驾驶测试的场景自演绎引擎设计方法,其特征在于,步骤s2中通用的场景自演绎函数具体为:
4.如权利要求3所述的一种面向自动驾驶测试的场景自演绎引擎设计方法,其特征在于,步骤s3中预测自动驾驶车辆状态,其具体为:
5.如权利要求4所述的一种面向自动驾驶测试的场景自演绎引擎设计方法,其特征在于,自动驾驶模型采用基于博弈的自动驾驶优化算法,其建立了一个场景内自动驾驶车与人类驾驶车交互博弈的优化控制模型,优化目标为辆车的成本函数都最小,且博弈的自动驾驶优化算法包括一个自动驾驶车的待优化成本函数和一个存在交互的人类驾驶车的待优化成本函数,该成本函数可描述车辆的驾驶风格与驾驶意图。
6.如权利要求1所述的一种面向自动驾驶测试的场景自演绎引擎设计方法,其特征在于,步骤s4中预测人类驾驶车辆状态,其具体为:
技术总结
本发明公开了一种面向自动驾驶测试的场景自演绎引擎设计方法,包括:S1、通过信息获取模块获取交通环境信息与交通参与者信息;S2、通过自演绎生成模块构建静态环境自演绎函数与通用场景自演绎函数;S3、通过自动驾驶车模块接收场景内自动驾驶车辆当前状态信息和与之存在交互的车辆信息,并通过自动驾驶算法模型,计算得到自动驾驶车辆的下一步状态信息,并输出给信息获取模块;S4、通过人类驾驶车模块接收场景内人类驾驶车辆当前状态信息与之存在交互的车辆信息,并通过人类驾驶算法模型,计算得到人类驾驶车辆的下一步状态信息,并输出给信息获取模块。根据本发明,复现交通参与者间的交互博弈,真实的还原了交通场景,使得基于场景的自动驾驶测试真实可靠。
技术研发人员:胡笳,徐恬,赖金涛,严学润,杜豫川,张瑞聪
受保护的技术使用者:同济大学
技术研发日:
技术公布日:2024/1/15
- 还没有人留言评论。精彩留言会获得点赞!