多贝叶斯估计法在多传感器数据融合中的应用的制作方法
本发明涉及传感器数据融合,尤其是涉及多贝叶斯估计法在多传感器数据融合中的应用。
背景技术:
1、近年来,数据融合技术的理论和方法在民用领域得到了广泛的应用,同时在其他领域也不断地发展。另外,各种数据融合研究组织以及相关的年会也为它的应用和技术提供了广泛和深入的研讨。目前,多传感器数据融合技术已经广泛应用于军事、航天、智能机器人控制等领域),其理论与方法已成为智能信息处理的一个重要研究领域。
2、现有的技术中,如公开号为cn104637020a的中国专利,其公开了一种基于多贝叶斯估计法的地铁施工风险快速评估方法,包括如下步骤:现场布设多元传感器通过有线或无线的方式将检测数据传输给地铁现场数据采集服务器,地铁现场数据采集服务器对多元传感器传回数据进行过滤处理,然后将处理后的数据发送给风险评估服务器;风险评估服务器对地铁现场数据采集服务器发送回来的检测数据进行分类和整合,转换为适于多贝叶斯估计法融合方法计算的数据阵列;然后风险评估服务器采用多贝叶斯估计法融合方法对上述数据进行风险评估处理,然后将风险快速评估结果发给检测监控中心计算机,由计算机中心处理单元进行下一步处理。
3、上述中的现有技术方案存在以下缺陷:虽然上述的方法能够对现场传回数据融合处理,进行初步排除施工风险极高的方案,保留可行性较高的施工方案,进而通过上述通过模型对可行性方案的参数进行逐一训练验证。但是其主要是对地铁施工风险进行快速评估,到目前为止,还未出现将多贝叶斯估计法运用在车站内外环境参数监测的应用,目前由于我国车站的不断增多,对车站内外环境的监测使用了大量的传感器,如何对这些传感器所采集的数据进行融合,解决数据的不一致性的难题仍然存在。
技术实现思路
1、针对现有技术存在的不足,本发明的目的是提供多贝叶斯估计法在多传感器数据融合中的应用,其采用多传感器数据融合算法将多个节点的测量数据进行数据融合,利用数据的冗余度来减小这种不确定性,得到高可靠性的数据消息,从而使得安装在车站内外环境中的多个传感器采集的数据更加准确,提高了数据的传输效率,保证了车站运行的效率与安全性。
2、本发明的上述发明目的是通过以下技术方案得以实现的:
3、多贝叶斯估计法在多传感器数据融合中的应用,包括以下步骤:
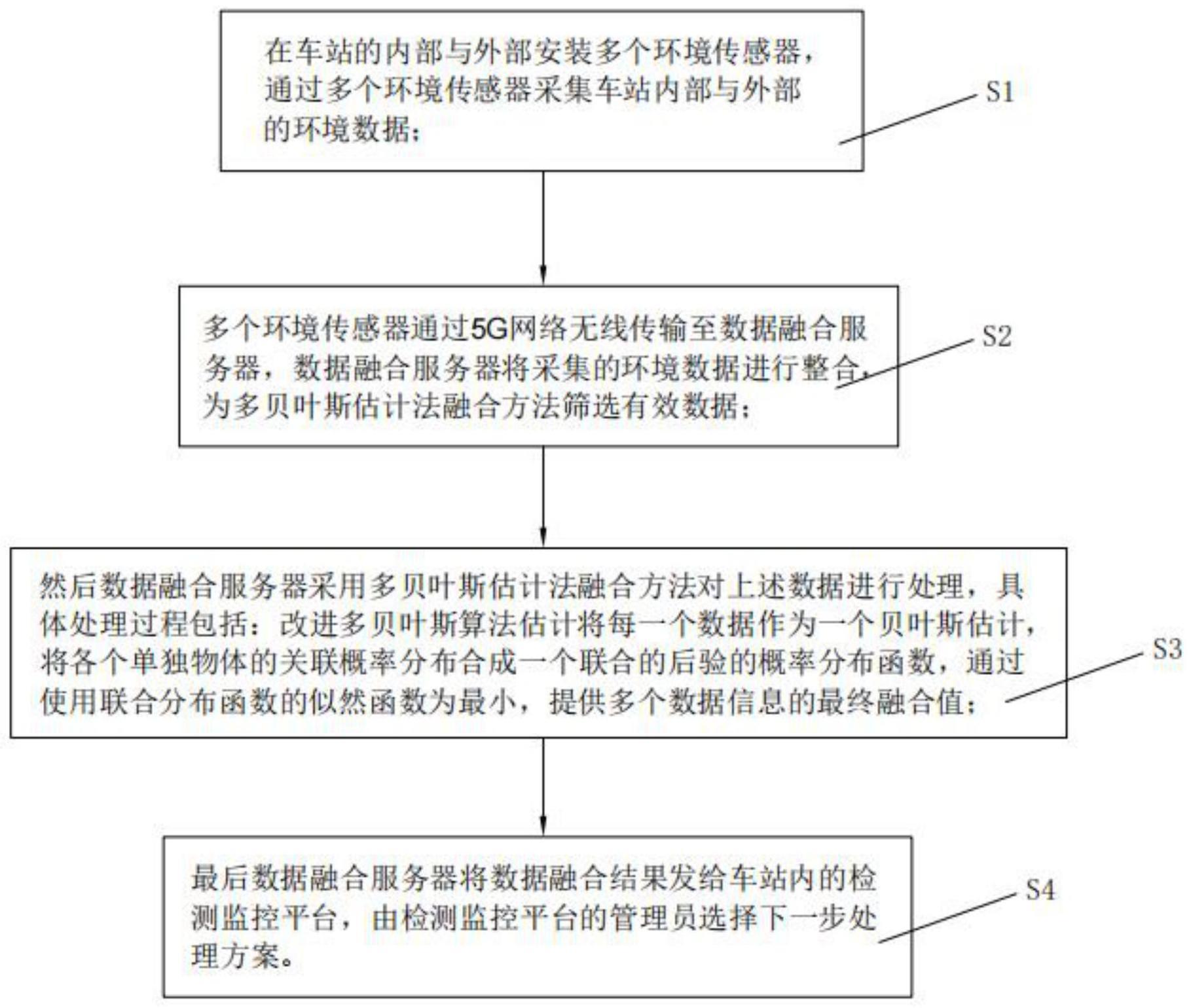
4、步骤s1、在车站的内部与外部安装多个环境传感器,通过多个环境传感器采集车站内部与外部的环境数据;
5、步骤s2、多个环境传感器通过5g网络无线传输至数据融合服务器,数据融合服务器将采集的环境数据进行整合,为多贝叶斯估计法融合方法筛选有效数据;
6、步骤s3、然后数据融合服务器采用多贝叶斯估计法融合方法对上述数据进行处理,具体处理过程包括:改进多贝叶斯算法估计将每一个数据作为一个贝叶斯估计,将各个单独物体的关联概率分布合成一个联合的后验的概率分布函数,通过使用联合分布函数的似然函数为最小,提供多个数据信息的最终融合值;
7、步骤s4、最后数据融合服务器将数据融合结果发给车站内的检测监控平台,由检测监控平台的管理员选择下一步处理方案。
8、本发明在一较佳示例中可以进一步配置为:在步骤s3中,所述改进多贝叶斯算法为前向滤波贝叶斯融合算法、后向滤波贝叶斯融合算法以及前后向滤波贝叶斯融合算法中的其中一种。
9、本发明在一较佳示例中可以进一步配置为:在所述前向滤波贝叶斯融合算法中,在融合节点之前增加卡尔曼滤波器,如算法1所示将卡尔曼滤波器添加到每一个传感器之后,滤除来自传感器测量带来的噪声然后将各个滤波后的测量值采用改进的贝叶斯融合算法融合到一起得到一个结果值,这个值就表示某一时刻的状态值:
10、算法1前向滤波算法(f-mb):
11、输入端:,(k),(k),(k-1),(k-1),(k-1),(k-1);
12、输出端:(k-1),(k);
13、开始:
14、1、ζ←;
15、2、for j←1 to 2 do;
16、3、(k),(k))←调用滤波器;
17、4、(k)←(k)/(1+)+(k)/(1+);
18、5、根据式(6)求出f值;
19、6、
20、本发明在一较佳示例中可以进一步配置为:在所述后向滤波贝叶斯融合算法中,在融合节点之后增加卡尔曼滤波器,首先根据改进的贝叶斯融合算法将各个测量值融合在一起得到融合的状态值xint,然后为了滤除噪声,将卡尔曼滤波器应用到融合的状态值xint,如算法2所示,卡尔曼滤波器的输出值表示某一时刻的状态值xf,以及方差pf:
21、算法2后向滤波算法(mb-f):
22、输入端:σ1σ2,z1(k),z2(k),xf(k-1),pf(k-1);
23、输出端:xf(k),pf(k);
24、开始:
25、1、ζ←σ1/σ2;
26、2、for j←1 to 2 do;
27、3、(xj(k),pj(k))←调用滤波器;
28、4、xint(k)←z1(k)/(1+ζ2)+z2(k)/(1+ζ-2);
29、5、根据式(6)求出f值;
30、6、
31、7、(xf(k),pf(k))←调用滤波器。
32、本发明在一较佳示例中可以进一步配置为:在所述前后向滤波贝叶斯融合算法中,在融合节点的前后都应用卡尔曼滤波器,该算法是算法1和算法2的集合,如算法3所示:
33、算法3前后向滤波算法(f-mb-f):
34、输入端:σ1σ2,z1(k),z2(k),x1(k-1),x2(k-1),xf(k-1),p1(k-1),p2(k-1),pf(k-1);
35、输出端:xf(k),pf(k);
36、开始:
37、1、ζ←σ1/σ2;
38、2、xint(k)←z1(k)/(1+ζ2)+z2(k)/(1+ζ-2);
39、3、根据式(6)求出f值;
40、4、
41、5、(xf(k),pf(k))←调用滤波器。
42、本发明在一较佳示例中可以进一步配置为:所述环境传感器包括温度传感器、湿度传感器、二氧化碳浓度传感器、pm2.5传感器以及人流量监控摄像头。
43、综上所述,本发明包括以下至少一种有益技术效果:
44、本发明公开了一种多贝叶斯估计法在多传感器数据融合中的应用,其为了解决传感数据的不确定性和不一致性问题,把改进的贝叶斯融合算法和卡尔曼滤波器结合了在一起。其采用多传感器数据融合算法将多个节点的测量数据进行数据融合,利用数据的冗余度来减小这种不确定性,得到高可靠性的数据消息,从而使得安装在车站内外环境中的多个传感器采集的数据更加准确,提高了数据的传输效率,保证了车站运行的效率与安全性。
技术特征:
1.多贝叶斯估计法在多传感器数据融合中的应用,其特征在于,包括以下步骤:
2.根据权利要求1所述的多贝叶斯估计法在多传感器数据融合中的应用,其特征在于,在步骤s3中,所述改进多贝叶斯算法为前向滤波贝叶斯融合算法、后向滤波贝叶斯融合算法以及前后向滤波贝叶斯融合算法中的其中一种。
3.根据权利要求2所述的多贝叶斯估计法在多传感器数据融合中的应用,其特征在于,在所述前向滤波贝叶斯融合算法中,在融合节点之前增加卡尔曼滤波器,如算法1所示将卡尔曼滤波器添加到每一个传感器之后,滤除来自传感器测量带来的噪声然后将各个滤波后的测量值采用改进的贝叶斯融合算法融合到一起得到一个结果值,这个值就表示某一时刻的状态值:
4.根据权利要求3所述的多贝叶斯估计法在多传感器数据融合中的应用,其特征在于,在所述后向滤波贝叶斯融合算法中,在融合节点之后增加卡尔曼滤波器,首先根据改进的贝叶斯融合算法将各个测量值融合在一起得到融合的状态值xint,然后为了滤除噪声,将卡尔曼滤波器应用到融合的状态值xint,如算法2所示,卡尔曼滤波器的输出值表示某一时刻的状态值xf,以及方差pf:
5.根据权利要求4所述的多贝叶斯估计法在多传感器数据融合中的应用,其特征在于,在所述前后向滤波贝叶斯融合算法中,在融合节点的前后都应用卡尔曼滤波器,该算法是算法1和算法2的集合,如算法3所示:
6.根据权利要求1所述的多贝叶斯估计法在多传感器数据融合中的应用,其特征在于,所述环境传感器包括温度传感器、湿度传感器、二氧化碳浓度传感器、pm2.5传感器以及人流量监控摄像头。
技术总结
本发明涉及多贝叶斯估计法在多传感器数据融合中的应用,包括以下步骤:步骤S1、在车站的内部与外部安装多个环境传感器,通过多个环境传感器采集车站内部与外部的环境数据;步骤S2、多个环境传感器通过5G网络无线传输至数据融合服务器,数据融合服务器将采集的环境数据进行整合,为多贝叶斯估计法融合方法筛选有效数据;步骤S3、然后数据融合服务器采用多贝叶斯估计法融合方法对上述数据进行处理,步骤S4、最后数据融合服务器将数据融合结果发给车站内的检测监控平台,由检测监控平台的管理员选择下一步处理方案。其采用多传感器数据融合算法将多个节点的测量数据进行数据融合,提高了数据的传输效率,保证了车站运行的效率与安全性。
技术研发人员:卢勇
受保护的技术使用者:上海铁维物联网科技有限公司
技术研发日:
技术公布日:2024/1/15
- 还没有人留言评论。精彩留言会获得点赞!