一种悬崖检测方法、装置、电子设备及介质与流程
本发明涉及图像处理,尤其涉及一种悬崖检测方法、装置、电子设备及介质。
背景技术:
1、随着生活水平的提高以及科技的进步,机器人已经成为家居空间和办公室等环境中的常用家电产品。当机器人在室内或室外工作时,若存在前方路面凹陷或深坑,或商场的扶梯区域等情况,机器人继续前行将会引发跌落的风险。这种情况下,轻者机器人本体会受到损坏,而重者机器人可能会从高处坠落,带来安全隐患。为了避免这种情况的发生,机器人需要及时感知到前方的凹陷或深坑,并及时采取应对措施。
2、目前,机器人防跌落的一种检测手段包括在底盘下方安装防跌落传感器,用于检测底盘与地面的距离。当距离超过一定的阈值时,传感器会认为存在跌落的危险。然而,传感器安装在底盘垂直向下看,只有在机器人离坑很近的时候才能检测到,无法提前预警。此外,在机器人通过减速带时,传感器很容易被误触发。
3、另一种检测手段是在机器人前方倾斜安装单线激光雷达,用于检测地面的距离。然而,单线激光雷达的检测范围较小,只能测量机器人到地面某个点的距离,如果前方路面凹陷面积小,则很容易检测不到。还有一些机器人采用视觉方式来检测路面凹陷,但由于每个路面的凹陷外观都不尽相同,视觉方式难以检测,并且在光照条件不好的情况下很容易失效。
4、综上,目前的检测手段的准确性不高。
技术实现思路
1、本申请实施例提供了一种悬崖检测方法、装置、电子设备及介质,用以解决现有技术中悬崖检测手段的准确性低的问题。
2、第一方面,本申请实施例提供了一种悬崖检测方法,所述方法包括:
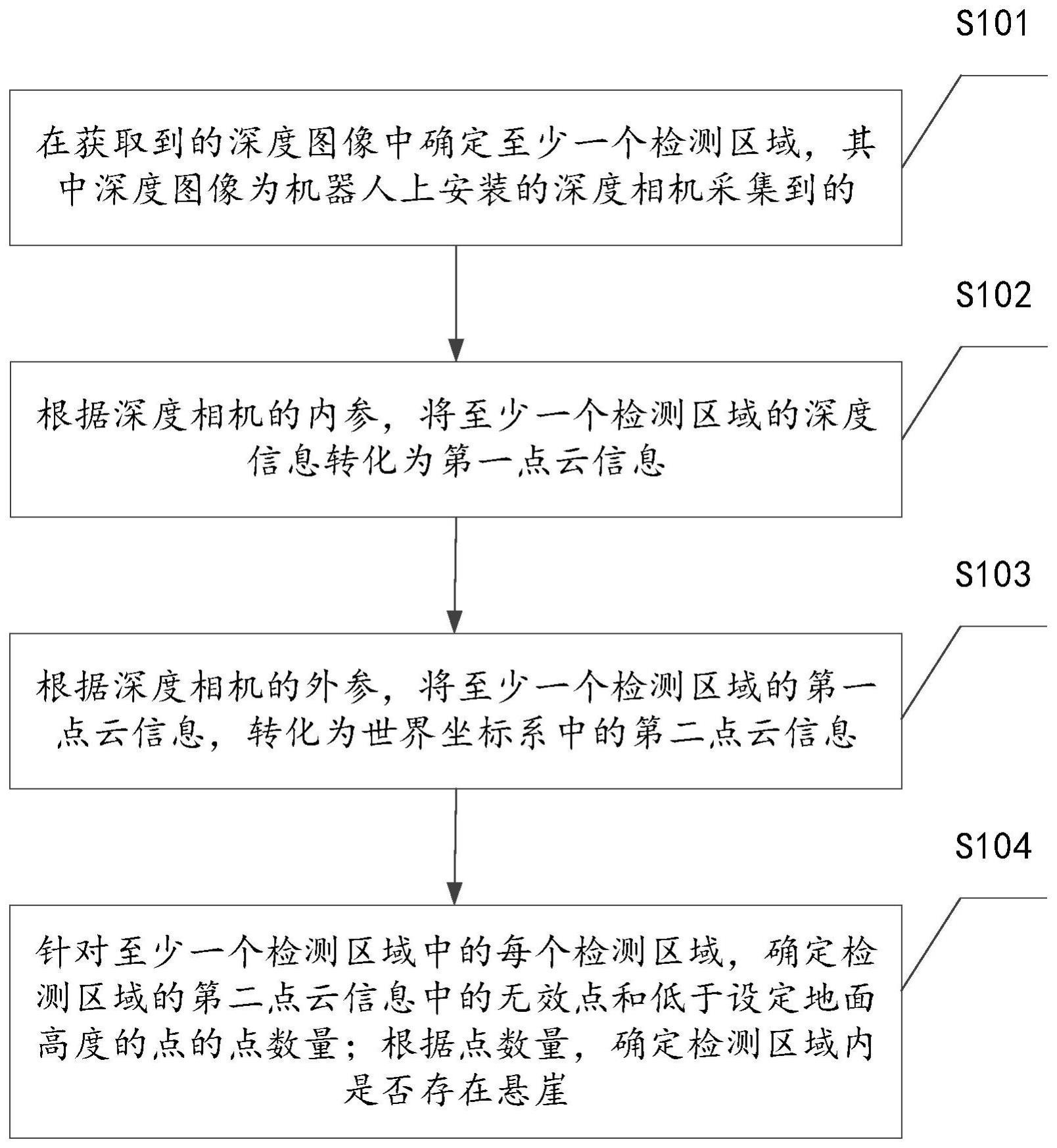
3、在获取到的深度图像中确定至少一个检测区域,其中所述深度图像为机器人上安装的深度相机采集到的;
4、根据所述深度相机的内参,将所述至少一个检测区域的深度信息转化为第一点云信息;
5、根据所述深度相机的外参,将所述至少一个检测区域的所述第一点云信息,转化为世界坐标系中的第二点云信息;
6、针对所述至少一个检测区域中的每个检测区域,确定所述检测区域的所述第二点云信息中的无效点和低于设定地面高度的点的点数量;根据所述点数量,确定所述检测区域内是否存在悬崖。
7、进一步地,所述根据所述点数量,确定所述检测区域内是否存在悬崖包括;
8、判断所述点数量是否超过设定阈值;
9、如果是,确定所述检测区域内存在悬崖;
10、如果否,确定所述检测区域内不存在悬崖。
11、进一步地,所述方法还包括:
12、如果所述至少一个检测区域内不存在悬崖,根据路径规划算法输出的速度运动。
13、进一步地,所述方法还包括:
14、如果所述至少一个检测区域内存在悬崖,屏蔽路径规划算法输出的速度,并输出速度0控制所述机器人停止运动。
15、进一步地,所述方法还包括:
16、如果所述至少一个检测区域内存在悬崖,在多层代价地图中添加用于标注所述悬崖的悬崖检测层;
17、基于所述多层代价地图,重新进行路径规划。
18、进一步地,所述在多层代价地图中添加用于标注所述悬崖的悬崖检测层包括:
19、根据所述至少一个检测区域和所述机器人的相对位置,在所述每个检测区域内标注障碍点集合,并记录标注时间,其中存在悬崖的检测区域内的障碍点集合与所述悬崖有关;
20、在所述每个检测区域内的障碍点集合中,删除所述机器人在地图平面的轮廓多边形内的障碍点,以及删除所述标注时间距离当前时间超过设定时间阈值的障碍点;
21、将删除后的障碍点集合中所有障碍点更新到代价地图的总图层中;
22、在所述代价地图的膨胀层中,对所述所有障碍点进行膨胀处理。
23、第二方面,本申请实施例提供了一种悬崖检测装置,其特征在于,所述装置包括:
24、第一确定模块,用于在获取到的深度图像中确定至少一个检测区域,其中所述深度图像为机器人上安装的深度相机采集到的;
25、第一转化模块,用于根据所述深度相机的内参,将所述至少一个检测区域的深度信息转化为第一点云信息;
26、第二转化模块,用于根据所述深度相机的外参,将所述至少一个检测区域的所述第一点云信息,转化为世界坐标系中的第二点云信息;
27、第二确定模块,用于针对所述至少一个检测区域中的每个检测区域,确定所述检测区域的所述第二点云信息中的无效点和低于设定地面高度的点的点数量;根据所述点数量,确定所述检测区域内是否存在悬崖。
28、进一步地,所述装置还包括:
29、标注模块,用于如果所述至少一个检测区域内存在悬崖,在多层代价地图中添加用于标注所述悬崖的悬崖检测层;基于所述多层代价地图,重新进行路径规划。
30、第三方面,本发明实施例提供了一种电子设备,所述电子设备至少包括处理器和存储器,所述处理器用于执行存储器中存储的计算机程序时执行上述任一项所述的悬崖检测方法的步骤。
31、第四方面,本发明实施例提供了一种计算机可读存储介质,其存储有计算机程序,所述计算机程序被处理器执行时执行上述任一项所述的悬崖检测方法的步骤。
32、在本申请实施例中,在获取到的深度图像中确定至少一个检测区域,其中深度图像为机器人上安装的深度相机采集到的;根据深度相机的内参,将至少一个检测区域的深度信息转化为第一点云信息;根据深度相机的外参,将至少一个检测区域的第一点云信息,转化为世界坐标系中的第二点云信息;针对至少一个检测区域中的每个检测区域,确定检测区域的第二点云信息中的无效点和低于设定地面高度的点的点数量;根据点数量,确定检测区域内是否存在悬崖。在该方法中,机器人上安装有深度相机,深度相机的检测范围更大,距离更远,并且不受光照条件的影响,因此可以及时检测到悬崖,提高检测效率和准确性。
技术特征:
1.一种悬崖检测方法,其特征在于,所述方法包括:
2.如权利要求1所述的方法,其特征在于,所述根据所述点数量,确定所述检测区域内是否存在悬崖包括;
3.如权利要求1或2所述的方法,其特征在于,所述方法还包括:
4.如权利要求1或2所述的方法,其特征在于,所述方法还包括:
5.如权利要求1所述的方法,其特征在于,所述方法还包括:
6.如权利要求5所述的方法,其特征在于,所述在多层代价地图中添加用于标注所述悬崖的悬崖检测层包括:
7.一种悬崖检测装置,其特征在于,所述装置包括:
8.如权利要求7所述的装置,其特征在于,所述装置还包括:
9.一种电子设备,其特征在于,所述电子设备至少包括处理器和存储器,所述处理器用于执行存储器中存储的计算机程序时实现如权利要求1-6任一项所述的悬崖检测方法的步骤。
10.一种计算机存储介质,其特征在于,其存储有可由电子设备执行的计算机程序,当所述程序在所述电子设备上运行时,使得所述电子设备执行权利要求1-6任一项所述的悬崖检测方法的步骤。
技术总结
本申请实施例提供了一种悬崖检测方法、装置、电子设备及介质,在该方法中,在获取到的深度图像中确定至少一个检测区域,其中深度图像为机器人上安装的深度相机采集到的;根据深度相机的内参,将至少一个检测区域的深度信息转化为第一点云信息;根据深度相机的外参,将至少一个检测区域的第一点云信息,转化为世界坐标系中的第二点云信息;针对至少一个检测区域中的每个检测区域,确定检测区域的第二点云信息中的无效点和低于设定地面高度的点的点数量;根据点数量,确定检测区域内是否存在悬崖。通过机器人上安装有深度相机,深度相机的检测范围更大,距离更远,并且不受光照条件的影响,因此可以及时检测到悬崖,提高检测效率和准确性。
技术研发人员:请求不公布姓名,李宇浩
受保护的技术使用者:麦岩智能科技(北京)有限公司
技术研发日:
技术公布日:2024/1/15
- 还没有人留言评论。精彩留言会获得点赞!