一种机器人离线程序校准方法、计算机设备及可读存储介质与流程
本申请涉及机器人应用,特别是涉及一种机器人离线程序校准方法、计算机设备及可读存储介质。
背景技术:
1、目前,机器人是智能制造领域的关键基础设备,而机器人的位姿性能精度是决定其工业场景应用的重要技术指标。通过在虚拟环境中导入产品、工装、工具和机器人模型,构建虚拟的机器人系统模型,在虚拟环境中完成机器人的运动程序离线示教和编程。
2、由于机器人在现实环境中的安装位置和虚拟环境中的位置无法保证一致,导致仿真导出的离线程序在实际操作时存在误差,需要进行离线程序校准工作。
3、因此,亟需一种机器人离线程序校准方法。
技术实现思路
1、基于此,有必要针对上述技术问题,提供一种机器人离线程序校准方法、计算机设备及可读存储介质。
2、第一方面,提供了一种机器人离线程序校准方法,所述方法包括:
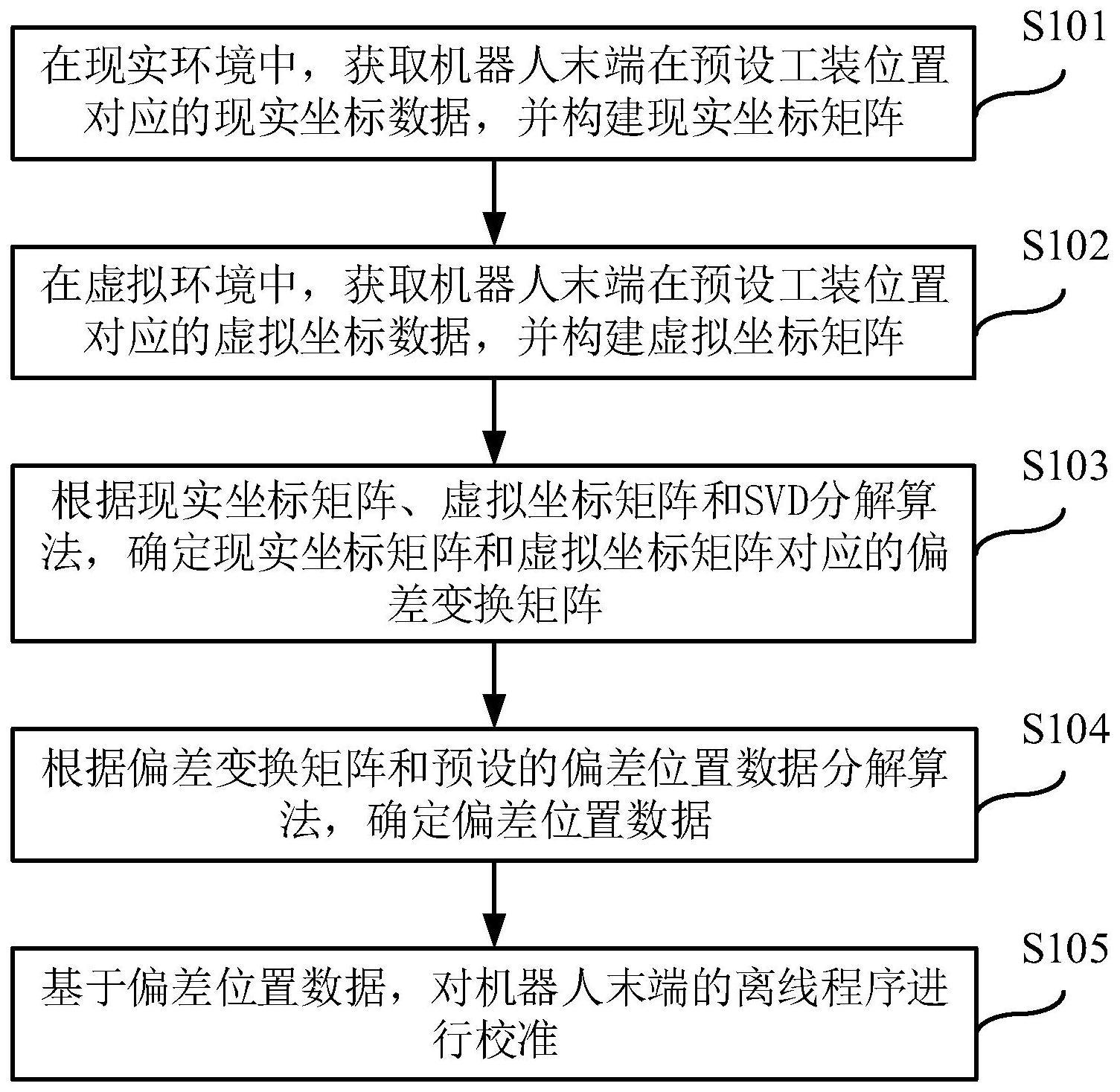
3、在现实环境中,获取机器人末端在预设工装位置对应的现实坐标数据,并构建现实坐标矩阵;
4、在虚拟环境中,获取所述机器人末端在所述预设工装位置对应的虚拟坐标数据,并构建虚拟坐标矩阵;
5、根据所述现实坐标矩阵、所述虚拟坐标矩阵和svd分解算法,确定所述现实坐标矩阵和所述虚拟坐标矩阵对应的偏差变换矩阵;
6、根据所述偏差变换矩阵和预设的偏差位置数据分解算法,确定偏差位置数据;
7、基于所述偏差位置数据,对所述机器人末端的离线程序进行校准。
8、作为一种可选的实施方式,所述根据所述现实坐标矩阵、所述虚拟坐标矩阵和svd分解算法,确定所述现实坐标矩阵和所述虚拟坐标矩阵对应的偏差变换矩阵,包括:
9、基于所述svd分解算法,对所述虚拟坐标矩阵进行svd分解,得到左奇异值矩阵、奇异值矩阵和右奇异值矩阵;
10、根据所述左奇异值矩阵、所述奇异值矩阵、所述右奇异值矩阵和所述现实坐标矩阵,确定所述现实坐标矩阵和所述虚拟坐标矩阵对应的偏差变换矩阵。
11、作为一种可选的实施方式,所述基于所述svd分解算法,对所述虚拟坐标矩阵进行svd分解,得到左奇异值矩阵、奇异值矩阵和右奇异值矩阵的公式为:
12、n=uvwt;
13、其中,n为虚拟坐标矩阵,u为左奇异值矩阵,v为奇异值矩阵,wt为右奇异值矩阵。
14、作为一种可选的实施方式,所述根据所述左奇异值矩阵、所述奇异值矩阵、所述右奇异值矩阵和所述现实坐标矩阵,确定所述现实坐标矩阵和所述虚拟坐标矩阵对应的偏差变换矩阵,包括:
15、分别确定所述左奇异值矩阵对应的第一逆矩阵、所述奇异值矩阵对应的第二逆矩阵和所述右奇异值矩阵对应的第三逆矩阵;
16、根据所述第一逆矩阵、所述第二逆矩阵、所述第三逆矩阵和所述现实坐标矩阵,确定所述现实坐标矩阵和所述虚拟坐标矩阵对应的偏差变换矩阵。
17、作为一种可选的实施方式,所述根据所述第一逆矩阵、所述第二逆矩阵、所述第三逆矩阵和所述现实坐标矩阵,确定所述现实坐标矩阵和所述虚拟坐标矩阵对应的偏差变换矩阵的公式为:
18、
19、其中,btp为偏差变换矩阵,m为现实坐标矩阵,u-1为第一逆矩阵,v-1为第二逆矩阵,为第三逆矩阵。
20、作为一种可选的实施方式,所述偏差位置数据包括平移偏差坐标量和旋转偏差坐标量,所述根据所述偏差变换矩阵和预设的偏差位置数据分解算法,确定偏差位置数据的公式为:
21、
22、其中,c表示三角函数cos,s表示三角函数sin,xb、yb和zb分别表示x轴、y轴和z轴的平移偏差坐标量,ψ、θ和φ表示zyx欧拉角分别绕x轴、y轴和z轴方向的旋转偏差坐标量。
23、作为一种可选的实施方式,所述预设工装位置为基于滑橇或工装测量建立的坐标系中的至少一个预设的位置。
24、作为一种可选的实施方式,所述基于所述偏差位置数据,对所述机器人末端的离线程序进行校准,包括:
25、根据所述偏差位置数据,修正所述虚拟环境下所述机器人末端的位置;
26、输出所述虚拟环境下所述机器人末端的离线程序至所述现实环境下所述机器人末端。
27、第二方面,提供了一种计算机设备,包括存储器及处理器,所述存储器上存储有可在处理器上运行的计算机程序,所述处理器执行所述计算机程序时实现如第一方面任一项所述的方法步骤。
28、第三方面,提供了一种计算机可读存储介质,其上存储有计算机程序,所述计算机程序被处理器执行时实现如第一方面任一项所述的方法步骤。
29、本申请提供了一种机器人离线程序校准方法、计算机设备及可读存储介质,所述方法包括:在现实环境中,获取机器人末端在预设工装位置对应的现实坐标数据,并构建现实坐标矩阵。在虚拟环境中,获取所述机器人末端在所述预设工装位置对应的虚拟坐标数据,并构建虚拟坐标矩阵。根据所述现实坐标矩阵、所述虚拟坐标矩阵和svd分解算法,确定所述现实坐标矩阵和所述虚拟坐标矩阵对应的偏差变换矩阵。根据所述偏差变换矩阵和预设的偏差位置数据分解算法,确定偏差位置数据。基于所述偏差位置数据,对所述机器人末端的离线程序进行校准。本申请的实施例提供的技术方案至少带来以下有益效果:首先,对应用场景没有要求,易于运用和部署。其次,以现实环境中的机器人末端位置坐标为基准,通过计算偏差位置数据,校准虚拟环境中的机器人末端位置,校准后输出的离线程序,由于修正了位置偏差,可以供现实环境中的机器人直接使用,有效提升了仿真精度。
30、应当理解的是,以上的一般描述和后文的细节描述仅是示例性和解释性的,并不能限制本申请。
技术特征:
1.一种机器人离线程序校准方法,其特征在于,所述方法包括:
2.根据权利要求1所述的方法,其特征在于,所述根据所述现实坐标矩阵、所述虚拟坐标矩阵和svd分解算法,确定所述现实坐标矩阵和所述虚拟坐标矩阵对应的偏差变换矩阵,包括:
3.根据权利要求2所述的方法,其特征在于,所述基于所述svd分解算法,对所述虚拟坐标矩阵进行svd分解,得到左奇异值矩阵、奇异值矩阵和右奇异值矩阵的公式为:
4.根据权利要求2所述的方法,其特征在于,所述根据所述左奇异值矩阵、所述奇异值矩阵、所述右奇异值矩阵和所述现实坐标矩阵,确定所述现实坐标矩阵和所述虚拟坐标矩阵对应的偏差变换矩阵,包括:
5.根据权利要求4所述的方法,其特征在于,所述根据所述第一逆矩阵、所述第二逆矩阵、所述第三逆矩阵和所述现实坐标矩阵,确定所述现实坐标矩阵和所述虚拟坐标矩阵对应的偏差变换矩阵的公式为:
6.根据权利要求1所述的方法,其特征在于,所述偏差位置数据包括平移偏差坐标量和旋转偏差坐标量,所述根据所述偏差变换矩阵和预设的偏差位置数据分解算法,确定偏差位置数据的公式为:
7.根据权利要求1所述的方法,其特征在于,所述预设工装位置为基于滑橇或工装测量建立的坐标系中的至少一个预设的位置。
8.根据权利要求1所述的方法,其特征在于,所述基于所述偏差位置数据,对所述机器人末端的离线程序进行校准,包括:
9.一种计算机设备,包括存储器及处理器,所述存储器上存储有可在处理器上运行的计算机程序,其特征在于,所述处理器执行所述计算机程序时实现权利要求1至8中任一项所述方法的步骤。
10.一种计算机可读存储介质,其上存储有计算机程序,其特征在于,所述计算机程序被处理器执行时实现权利要求1至8中任一项所述的方法的步骤。
技术总结
本申请涉及一种机器人离线程序校准方法、计算机设备及可读存储介质,涉及机器人应用技术领域。所述方法包括:在现实环境中,获取机器人末端在预设工装位置对应的现实坐标数据,并构建现实坐标矩阵。在虚拟环境中,获取所述机器人末端在所述预设工装位置对应的虚拟坐标数据,并构建虚拟坐标矩阵。根据所述现实坐标矩阵、所述虚拟坐标矩阵和SVD分解算法,确定所述现实坐标矩阵和所述虚拟坐标矩阵对应的偏差变换矩阵。根据所述偏差变换矩阵和预设的偏差位置数据分解算法,确定偏差位置数据。基于所述偏差位置数据,对所述机器人末端的离线程序进行校准。采用本申请可以使机器人末端在现实环境与虚拟环境的位置一致,修正离线程序误差。
技术研发人员:范尧,胡健斌,谢宁,陈梁,杨华
受保护的技术使用者:上汽通用五菱汽车股份有限公司
技术研发日:
技术公布日:2024/1/15
- 还没有人留言评论。精彩留言会获得点赞!