基于FPGA的改进局部线性嵌入风机轴承故障诊断方法与流程
本发明涉及风机齿轮箱故障诊断,尤其涉及一种基于fpga的改进局部线性嵌入风机轴承故障诊断方法。
背景技术:
1、在风力发电的风机主控系统中,风机齿轮箱的运行可靠性至关重要,因此常通过设置fpga模块和传感器来分析风机齿轮箱运行数据从而得到故障诊断结果,再反馈给cpu,振动分析法和机器学习方法是目前风机轴承故障诊断的主要方法,两种方法都是通过传感器测取风机轴承的振动信号,然后对轴承振动信号分析得出风机轴承的故障类型,而实现风机轴承故障诊断。
2、振动分析法和机器学习法都对故障特征的选择和提取有着较高的要求。但振动分析法在实际使用的过程中过于依赖人工选取特征,有一定的主观性。机器学习法在处理实时产生的大量高维风机信号时容易造成信号滞后,不能及时发现风机运行的故障,实时性不佳。同时由于风机轴承的实际工况复杂多变,但两种方法在模式识别过程中,通常通过经验确定算法参数,且各个算法的参数固定不变,难以适应实时变换的复杂工作环境,难以保证对轴承故障特征的识别准确可靠。
技术实现思路
1、有鉴于此,本发明的目的在于提出一种基于fpga的改进局部线性嵌入风机轴承故障诊断方法,以解决目前风机齿轮箱轴承故障诊断提取故障特征不准确、实时性不强的问题。
2、基于上述目的,本发明提供了一种基于fpga的改进局部线性嵌入风机轴承故障诊断方法,包括以下步骤:
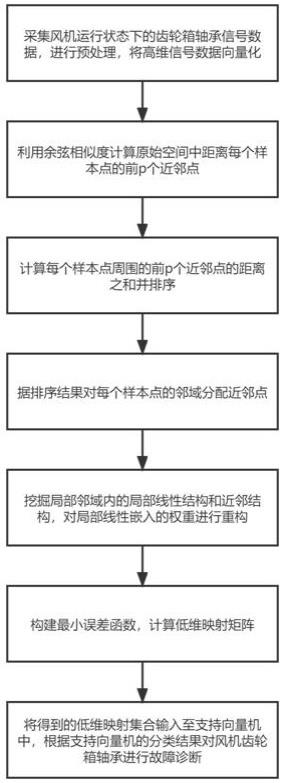
3、s1、采集风机运行状态下的齿轮箱轴承信号数据;
4、s2、对信号数据进行预处理,将高维信号数据向量化,构建风机齿轮箱轴承的原始数据空间,利用余弦相似度计算原始空间中每个样本点的前p个近邻点;
5、s3、计算每个样本点周围的前p个近邻点的距离之和并排序,根据排序结果对每个样本点的邻域分配近邻点;
6、s4、挖掘局部邻域内的局部线性结构和近邻结构,对局部线性嵌入的权重进行重构;
7、s5、根据重构后的权重,构建最小误差函数,计算低维映射矩阵;
8、s6、将得到的低维映射集合输入至支持向量机中,根据支持向量机的分类结果对风机齿轮箱进行故障诊断,得到并输出故障诊断结果;
9、其中,步骤s2进一步包括:
10、s21、将高维数据向量化,得到原始数据空间,其中,n为样本点数,d为高维数据维数;
11、s22、利用余弦相似度计算每个样本点周围的前p个近邻点,余弦相似度的计算公式为
12、;
13、其中,,表示的是样本的第t维,的值越大,与之间的相似度越高,表示样本和之间的余弦相似度,q表示样本个数。
14、优选地,步骤s3进一步包括:
15、s31、计算每个样本点周围的前p个近邻点的距离之和,计算公式为
16、;
17、其中表示第i个样本点与其前p个近邻点的距离之和;
18、s32、对计算的近邻点之和进行排序,给定近邻点k的范围[kmin, kmax];
19、s33、通过公式为每个样本点选择邻域内近邻点的个数,表示第1个样本点与其前p个近邻点的距离之和,表示最后一个样本点与其前p个近邻点的距离之和。
20、优选地,步骤s4的具体过程包括:
21、s41、计算样本点邻域内局部线性结构权重,计算公式为
22、;
23、其中表示和之间的重构权值,如果是的邻居,则可由计算,反之,表示的权重系数向量(表示和之间的重构权值);
24、s42、计算样本点邻域内的近邻结构权重,计算公式为
25、;
26、s43、对局部线性结构权重和近邻结构权重进行融合,公式为
27、,其中表示调节参数,;
28、其中,为重构权重,为原始权重,为包含近邻结构权重。
29、优选地,步骤s5的具体过程包括:
30、s51、计算低维映射y,保持重构权重矩阵不变,最小化低维重构误差
31、;
32、将该式进一步写成:
33、;
34、式中,且约束函数矩阵化为:,构建lagrange函数:;
35、对y求导并令该式为0,计算得到低维映射y;
36、其中,l表示构建的拉格朗日函数,为重构权重,为原始权重,为包含近邻结构权重,wlij表示的是样本xi和xj之间的原始权重,weij表示的是样本xi和xj之间的重构权重,wnij表示的是样本xi和xj之间的近邻结构权重,i是单位矩阵,m,m是求解拉格朗日函数中的协方差矩阵,tr表示的是矩阵的迹,是构建拉格朗日函数必要的系数。
37、优选地,步骤s6进一步包括:
38、将得到的低维映射集合选择50%样本作为训练集,50%样本作为测试集,根据支持向量机的分类结果对风机齿轮箱进行故障诊断,得到故障诊断结果。
39、本发明的有益效果:
40、1、本发明对原始高维数据的实时处理速度有一定地提高,有效地增强了风机齿轮箱轴承故障诊断的实时性。
41、2、本发明通过对局部线性嵌入算法的改进,能够有效挖掘原始高维数据的局部结构,进一步提取故障数据的本质特征,提高了风机齿轮箱轴承故障诊断的准确度。
技术特征:
1.一种基于fpga的改进局部线性嵌入风机轴承故障诊断方法,其特征在于,所述方法包括以下步骤:
2.根据权利要求1所述的基于fpga的改进局部线性嵌入风机轴承故障诊断方法,其特征在于,步骤s3进一步包括:
3.根据权利要求2所述的基于fpga的改进局部线性嵌入风机轴承故障诊断方法,其特征在于,步骤s4的具体过程包括:
4.根据权利要求3所述的基于fpga的改进局部线性嵌入风机轴承故障诊断方法,其特征在于,步骤s5的具体过程包括:
5.根据权利要求4所述的基于fpga的改进局部线性嵌入风机轴承故障诊断方法,其特征在于,步骤s6进一步包括:
技术总结
本发明涉及风机齿轮箱故障诊断技术领域,尤其涉及一种基于FPGA的改进局部线性嵌入风机轴承故障诊断方法,本发明通过将高维信号数据向量化,构建风机齿轮箱轴承的原始数据空间,对原始高维数据的实时处理速度有一定地提高,有效地增强了风机齿轮箱轴承故障诊断的实时性,通过对局部线性嵌入算法的改进,能够有效挖掘原始高维数据的局部结构,进一步提取故障数据的本质特征,提高了风机齿轮箱轴承故障诊断的准确度。
技术研发人员:王善永,王佩林,吴俊杰
受保护的技术使用者:傲拓科技股份有限公司
技术研发日:
技术公布日:2024/1/15
- 还没有人留言评论。精彩留言会获得点赞!