目标跟踪方法、高速相机及存储介质与流程
本申请涉及目标跟踪领域,尤其涉及一种目标跟踪方法、高速相机和存储介质。
背景技术:
1、随着科技的进步和应用领域的拓展,高速运动的分析和研究变得越来越重要。在很多行业,如运动科学、机械工程、交通安全等领域,对高速运动的理解和掌握具有关键意义,因此,市场对于能够提供高精度、实时分析高速运动的软件工具的需求日益增加。高速运动分析软件需要对高速运动物体进行目标跟踪,自动化分析提取关键的动态信息并生成相应的运动数据,当前常见的目标跟踪方法有基于特征点的跟踪方法、基于深度学习的跟踪方法和基于粒子滤波的跟踪方法等,但这些跟踪方法往往需要大量的样本采样和复杂计算进行训练和推理,在计算精度和鲁棒性方面欠佳。
技术实现思路
1、本申请实施例提供一种目标跟踪方法、高速相机和存储介质,该方法通过图像处理和匹配算法实现目标跟踪,计算精度高且具备良好的鲁棒性。
2、第一方面,一种目标跟踪方法,其特征在于,所述方法包括:
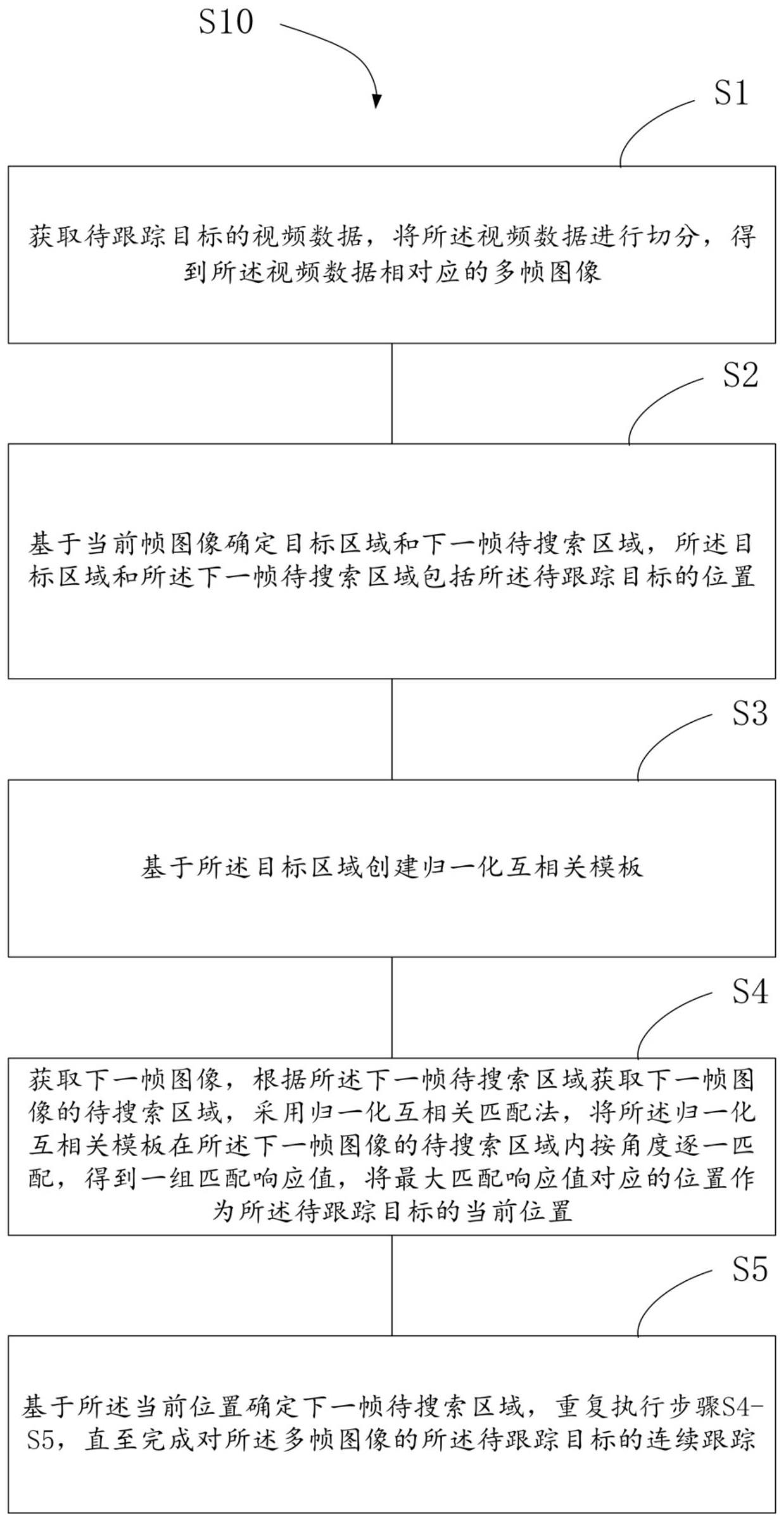
3、s1.获取待跟踪目标的视频数据,将所述视频数据进行切分,得到所述视频数据相对应的多帧图像;
4、s2.基于当前帧图像确定目标区域和下一帧待搜索区域,所述目标区域和所述下一帧待搜索区域包括所述待跟踪目标的位置;
5、s3.基于所述目标区域创建归一化互相关模板;
6、s4.获取下一帧图像,根据所述下一帧待搜索区域获取下一帧图像的待搜索区域,采用归一化互相关匹配法,将所述归一化互相关模板在所述下一帧图像的待搜索区域内按角度逐一匹配,得到一组匹配响应值,将最大匹配响应值对应的位置作为所述待跟踪目标的当前位置;
7、s5.基于所述当前位置确定下一帧待搜索区域,重复执行步骤s4-s5,直至完成对所述多帧图像的所述待跟踪目标的连续跟踪。
8、在一些实施例中,所述基于所述目标区域创建归一化互相关模板,包括:
9、若所述目标区域的长或高超过第一像素值,对所述目标区域进行压缩;
10、基于预设的模板范围和模板步长,创建一组归一化互相关模板,其中,所述模板范围为第一角度范围,所述模板步长为第一角度步长。
11、在一些实施例中,述采用归一化互相关匹配法,将所述归一化互相关模板在所述下一帧图像的待搜索区域内按角度逐一匹配的匹配公式为:
12、;
13、其中,表示匹配响应值,用于衡量归一化互相关模板和待匹配图像的相似度,所述待匹配图像在所述下一帧图像的待搜索区域内,表示所述归一化互相关模板和所述待匹配图像之间相对位移的参数,表示所述下一帧图像的待搜索区域,表示所述归一化互相关模板的像素值,表示所述待匹配图像对应位置在方向上分别偏移和之后的像素值,和分别表示所述和的平均像素值。
14、在一些实施例中,所述方法还包括:
15、若所述最大匹配响应值大于或等于预设匹配响应阈值,对所述待跟踪目标的当前位置进行亚像素处理,得到所述待跟踪目标的亚像素位置;
16、以所述亚像素位置更新所述当前位置。
17、在一些实施例中,所述方法还包括:
18、若所述最大匹配响应值小于预设匹配响应阈值,结束对所述待跟踪目标的跟踪。
19、在一些实施例中,所述对所述待跟踪目标的当前位置进行亚像素处理,得到所述待跟踪目标的亚像素位置,包括:
20、选取所述当前位置的坐标点以及相邻的8个坐标点,进行二维高斯曲面拟合,得到曲面拟合函数的系数 a、b、c、d、e、f;
21、根据所述曲面拟合函数的系数计算得到所述待跟踪目标的亚像素位置。
22、在一些实施例中,所述二维高斯曲面拟合的公式为:
23、;
24、所述根据所述曲面拟合函数的系数计算得到所述待跟踪目标的亚像素位置,包括:
25、;
26、;
27、其中,为所述亚像素位置的横坐标,为所述亚像素位置的纵坐标。
28、在一些实施例中,所述方法还包括:
29、基于对所述待跟踪目标的连续跟踪获得的各位置,得到目标运动轨迹;
30、将所述目标运动轨迹进行卡尔曼滤波,得到平滑运动轨迹;
31、基于所述平滑运动轨迹得到所述待跟踪目标每一时刻的运动数据,所述运动数据包括位移、速度和加速度中的至少一种。
32、第二方面,本申请提供一种高速相机,其特征在于,包括:
33、摄像单元,用于获取待跟踪目标的视频数据,以及
34、至少一个处理器,以及
35、与所述至少一个处理器通信连接的存储器,其中,
36、所述存储器存储有可被所述至少一个处理器执行的指令,所述指令被所述至少一个处理器执行,以使所述至少一个处理器能够执行如上第一方面任一项所述的方法。
37、第三方面,本申请还提供了计算机可读存储介质,其特征在于,所述计算机可读存储介质存储有计算机可执行指令,当所述计算机可执行指令被计算机所执行时,使所述计算机执行如上第一方面的方法。
38、本发明实施例的有益效果:区别于现有技术,本申请实施例提供一种目标跟踪方法、高速相机和存储介质,该方法首先通过获取待跟踪目标的视频数据,根据当前帧图像确定目标区域和下一帧待搜索区域,根据目标区域创建归一化互相关模板。然后获取下一帧图像,根据下一帧待搜索区域获取下一帧图像的待搜索区域,将归一化互相关模板在下一帧图像的待搜索区域内按角度逐一匹配,得到一组匹配响应值,并确定待跟踪目标的当前位置。最后基于当前位置确定下一帧待搜索区域,并重复执行上述步骤,直至完成对多帧图像中待跟踪目标的连续跟踪。本申请提出的的目标跟踪方法在拍摄过程中对目标的姿态、旋转、遮挡和光照等变化因素不敏感,计算精度高且具备良好的鲁棒性。
技术特征:
1.一种目标跟踪方法,其特征在于,所述方法包括:
2.根据权利要求1所述的方法,其特征在于,所述基于所述目标区域创建归一化互相关模板,包括:
3.根据权利要求1所述的方法,其特征在于,所述采用归一化互相关匹配法,将所述归一化互相关模板在所述下一帧图像的待搜索区域内按角度逐一匹配的匹配公式为:
4.根据权利要求1所述的方法,其特征在于,所述方法还包括:
5.根据权利要求4所述的方法,其特征在于,所述方法还包括:
6.根据权利要求4所述的方法,其特征在于,所述对所述待跟踪目标的当前位置进行亚像素处理,得到所述待跟踪目标的亚像素位置,包括:
7.根据权利要求6所述的方法,其特征在于,所述二维高斯曲面拟合的公式为:
8.根据权利要求1所述的方法,其特征在于,所述方法还包括:
9.一种高速相机,其特征在于,包括:
10.一种计算机可读存储介质,其特征在于,所述计算机可读存储介质存储有计算机可执行指令,所述计算机可执行指令用于使计算机设备执行如权利要求1-8任一项所述的方法。
技术总结
本申请涉及目标跟踪领域,尤其涉及一种目标跟踪方法、高速相机和存储介质。该方法首先通过获取待跟踪目标的视频数据,根据当前帧图像确定目标区域和下一帧待搜索区域,根据目标区域创建归一化互相关模板。然后获取下一帧图像,根据下一帧待搜索区域获取下一帧图像的待搜索区域,将归一化互相关模板在下一帧图像的待搜索区域内按角度逐一匹配,得到一组匹配响应值,并确定待跟踪目标的当前位置。最后基于当前位置确定下一帧待搜索区域,并重复执行上述步骤,直至完成对多帧图像中待跟踪目标的连续跟踪。本申请提出的目标跟踪方法在拍摄过程中对目标的姿态、旋转、遮挡和光照等变化因素不敏感,计算精度高且鲁棒性好。
技术研发人员:潘勇,郭俊敏,金少峰
受保护的技术使用者:深圳市深视智能科技有限公司
技术研发日:
技术公布日:2024/1/15
- 还没有人留言评论。精彩留言会获得点赞!