一种在高炉环境下进行相机外参数标定方法和标定装置
本发明属于冶金领域的图像处理技术,具体涉及一种在高炉环境下使用相机测量目标位置时的相机外参数标定方法和标定装置。
背景技术:
1、在正常的炼铁过程中,高炉是一个典型的高温、高压且高度复杂的化学反应环境。这个大型的密闭容器内部,矿石和还原剂在高温条件下发生连续的化学反应。由于强烈的化学反应和高温熔化、再加上由炉顶倾倒的炉料,炉内的环境极其恶劣。但由于实时获得高炉内料面的形态可以指导技术人员优化炼铁过程,通过及时调整投料、风量等操作参数提高炼铁的效率和质量;此外,还可以及时发现炉料面的异常变化,如结块、漏风、滑料等。因此,实时获取高炉物料平面曲线对高炉生产具有积极意义。
2、目前获取高炉物料平面曲线的方法有多种,如雷达测量、视觉测量、机械探尺测量等。机械探尺测量虽然准确可靠,但是不能遍布炉顶的每一点,更多的需要凭借操作人员的经验操作,给高炉操作带来很大的经验性和随意性。雷达测量具有较高的精确性和稳定性,还具有测量距离范围,因此能满足大部分工业应用,但是其价格高,且雷达的安装和维护较复杂且昂贵;再有其对于泡沫、尘埃和表面粗糙的物料容易产生干扰,可能导致测量误差。
3、高炉正常运行时,安装在炉壁上的相机采集到的图像通常是漆黑一片,只有偶尔可以看到炉内的火焰。无法进行视觉测量,但当高炉需要进行检修、维护或是出现故障时,就需要执行休风操作。在休风期间,炉内的温度和压力也会相应降低。虽然此时已经停止了送风,但仍然需要采取一些措施来维持炉内的高温状态,例如周期性地向炉内注入热风或蒸汽,以防止炉内的温度降低过快。在这种情况下,安装在炉壁上的相机采集到的图像就会有所不同,除了中心的火焰外,经过图像处理,相机捕获的图像还可以较为清晰地看到炉壁的结构和状态。
4、对安装在高炉上的相机进行外参数标定,相机外参数描述了相机的位置和姿态参数。目前,相机的外参数标定方法主要包括直接线性变换、张正友标定法、基于特征的方法、自标定方法。直接线性变换法通过最少6对非共面的点进行相机标定,考虑到实际测量时只测量剖面即可,因此只需要对指定的单个平面上的点进行标定即可。张正友标定法需要使用棋盘格,而高炉环境内无法使用棋盘格进行标定,只能依赖于已有的炉壁建造参数作为特征点;基于特征的方法需要使用已知尺寸物体也无法在高炉中实现;直接线性变换法则对相机的运动有要求,高炉内相机则是被固定在炉壁上,亦不适合高炉内的场景。
5、在高炉内进行相机外参数的标定,最困难的地方在于寻找特征点,能够让相机实现对指定平面上的测量。为此考虑设计一种在高炉环境下使用相机测量目标位置时的相机外参数标定方法解决在高炉环境这一密闭环境内进行相机外参数标定的问题。
技术实现思路
1、本发明的目的在于解决高炉环境这一密闭环境内使用相机测量目标位置时的相机外参数标定的问题,提供一种在高炉环境下进行相机外参数标定方法和标定装置。
2、本发明的目的是通过以下技术方案实现的:
3、一种在高炉环境下进行相机外参数标定方法,在完成标定环境准备后,包括如下步骤:
4、步骤一:在高炉休风过程中进行标定图像采集
5、在激光器旋转过程中,所述工业相机持续捕获多个高炉图像,所述周期图像中包含激光器照射在炉壁上的激光点,并将高炉图像送至处理器进行分析;
6、步骤二:对采集的所有高炉图像进行预处理分别获取第一特征点和第二特征点的图像坐标系坐标与世界坐标系坐标;
7、具体包括:
8、s201:根据相机捕获的图像选取多个激光点作为第一特征点,以超出相机视野的激光器中心作为第二特征点;
9、s202:根据预先获取的高炉内侧炉壁的轮廓和高炉构建参数,获取高炉图像中的第一特征点对应的世界坐标系坐标,以及根据激光器的安装位置计算获得激光器坐标作为第二特征点对应的世界坐标系坐标;
10、s203:对高炉图像进行激光点标注,得到激光点组成的测量面与高炉相交的曲线;提取该曲线与由炉砖形成的高炉内侧炉壁轮廓的交点,作为所述第一特征点对应的图像坐标系坐标;
11、所述第一特征点的图像坐标系坐标与世界坐标系坐标一一对应;
12、s204:标注高炉图像中激光线的两个顶点,在图像坐标系中为每一个激光线进行建模,获得任一点到激光线的距离,并计算得出一个点,使得其到直线集的距离最短,从而获得激光器中心点位置,作为所述第二特征点对应的图像坐标系坐标;
13、步骤三:图像处理
14、根据第一特征点计算单应性矩阵h;根据步骤s204获得的第二特征点坐标对获得的单应性矩阵h进行迭代优化,获得更新的单应性矩阵h;
15、根据更新的单应性矩阵h以及预先标定工业相机内参数k,求取相机外参数m,获得相机的位置和姿态,从而获得工业相机的旋转矩阵和平移矩阵。
16、进一步的,s203具体包括:圈出激光光斑的轮廓;再将轮廓内所有坐标和对应的灰度值记录下来,利用灰度重心法计算激光光斑的重心,获得当前高炉图像对应的激光点坐标,计算激光器各旋转周期中同一张图片中激光点坐标的平均值作为激光点序列,将激光点序列标注在同一图片上,得到激光点组成的测量面与高炉相交的曲线。
17、进一步的,s203中圈出激光光斑的轮廓具体包括:
18、首先,利用opencv图像处理技术将图像放大到最大,选取可能的激光中心点所在区域为感兴趣区域,使用canny边缘检测算法得到图像的合理边缘点集,使用findcontours工具检索图像中的轮廓,圈出激光光斑的轮廓。
19、进一步的,所述坐标已知特征点个数不少于4个。
20、进一步的,在步骤三中,当第一特征点数量多于4个时,在根据第一特征点计算单应性矩阵时依次使用最小二乘法、迭代优化获得单应性矩阵的最优解并消除误差,当平均误差<5cm时,表明第一特征点准确,进行下一步。
21、进一步的,标定环境准备包括:
22、在高炉内需要被测量平面的炉喉上安装激光器以及工业相机;所述激光器所发出的激光线旋转的平面和被测量的平面保持重合;所述工业相机与激光器位于同一水平面,且预先标定工业相机内参数k。
23、进一步的,高炉构建参数包括:炉喉高度和半径、炉身高度和半径、构建炉喉炉身使用的材料尺寸;
24、一种标定装置,包括激光器、工业相机和处理器;所述激光器和工业相机安装于高炉内,所述工业相机与激光器位于同一水平面,且发出的激光线旋转的平面和高炉的被测量的平面保持重合,所述测量的平面为高炉的中心剖面;所述激光器通过plc与处理器连接;所述工业相机通过工业采集卡与处理器连接,所述处理器用于实现所述标定方法。
25、与现有技术相比,本发明的技术方案所带来的有益效果是:
26、本发明利用激光构造特征点,解决了高炉内参照特征点少的问题;并使用极少的特征点计算相对准确单应性矩阵,最后获得旋转矩阵和平移矩阵。
技术特征:
1.一种在高炉环境下进行相机外参数标定方法,其特征在于,在完成标定环境准备后,包括如下步骤:
2.根据权利要求1所述的相机外参数标定方法,其特征在于,步骤s203具体包括:圈出激光光斑的轮廓;再将轮廓内所有坐标和对应的灰度值记录下来,利用灰度重心法计算激光光斑的重心,获得当前高炉图像对应的激光点坐标,计算激光器各旋转周期中同一张图片中激光点坐标的平均值作为激光点序列,将激光点序列标注在同一图片上,得到激光点组成的测量面与高炉相交的曲线。
3.根据权利要求2所述的相机外参数标定方法,其特征在于,步骤s203中圈出激光光斑的轮廓具体包括:
4.根据权利要求1所述的相机外参数标定方法,其特征在于,所述坐标已知特征点个数不少于4个。
5.根据权利要求4所述的相机外参数标定方法,其特征在于,在步骤三中,当第一特征点数量多于4个时,在根据第一特征点计算单应性矩阵时依次使用最小二乘法、迭代优化获得单应性矩阵的最优解并消除误差,当平均误差<5cm时,表明第一特征点准确,进行下一步。
6.根据权利要求1所述的相机外参数标定方法,其特征在于,标定环境准备包括:
7.根据权利要求1所述的相机外参数标定方法,其特征在于,高炉构建参数包括:炉喉高度和半径、炉身高度和半径、构建炉喉炉身使用的材料尺寸。
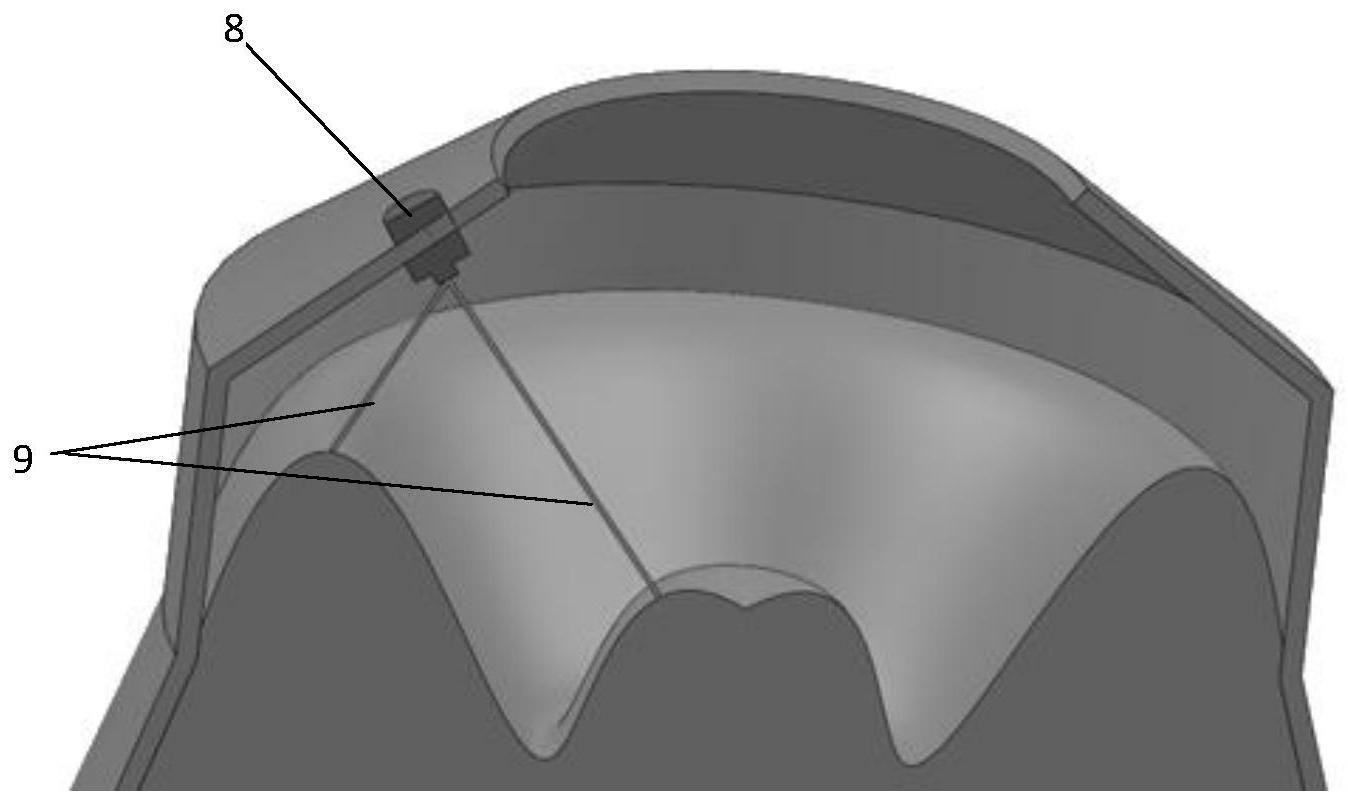
8.一种标定装置,其特征在于,包括激光器(8)、工业相机和处理器;所述激光器和工业相机安装于高炉内,所述工业相机与激光器(8)位于同一水平面,且发出的激光线(9)旋转的平面和高炉的被测量的平面保持重合,所述测量的平面为高炉的中心剖面;所述激光器(8)通过plc与处理器连接;所述工业相机通过工业采集卡与处理器连接,所述处理器用于实现权利要求1所述的相机外参数标定方法。
技术总结
本发明公开了一种在高炉环境下进行相机外参数标定方法和标定装置,在完成标定环境准备后,包括在高炉休风过程中进行标定图像采集;对采集的所有高炉图像进行预处理分别获取第一特征点和第二特征点的图像坐标系坐标与世界坐标系坐标;根据第一特征点计算单应性矩阵H;根据第二特征点对单应性矩阵进行迭代优化,从而求取相机外参数矩阵M,获得工业相机的旋转矩阵和平移矩阵。本发明利用可旋转的激光器构造特征点,解决了高炉内无参照特征点的问题,并能够在至少使用4个特征点的情况下计算相对准确单应性矩阵,最后获得旋转矩阵和平移矩阵。
技术研发人员:校建涛,李杏华,王高捍,贾海波,郑军虎
受保护的技术使用者:天津大学
技术研发日:
技术公布日:2024/1/16
- 还没有人留言评论。精彩留言会获得点赞!