一种滑动轴承载荷的确定方法、装置、设备及介质与流程
本发明涉及数据处理领域,具体而言涉及一种滑动轴承载荷的确定方法、装置、设备及介质。
背景技术:
1、目前,在转子-轴承系统中,对于船用设备的滑动轴承载荷的确定方法,所得到的滑动轴承载荷与实际相差较大,这就会导致设备在运行时,容易产生安全事故。
技术实现思路
1、在
技术实现要素:
部分中引入了一系列简化形式的概念,这将在具体实施方式部分中进一步详细说明。本发明的发明内容部分并不意味着要试图限定出所要求保护的技术方案的关键特征和必要技术特征,更不意味着试图确定所要求保护的技术方案的保护范围。
2、第一方面,本发明实施例提供了一种滑动轴承载荷的确定方法,包括:
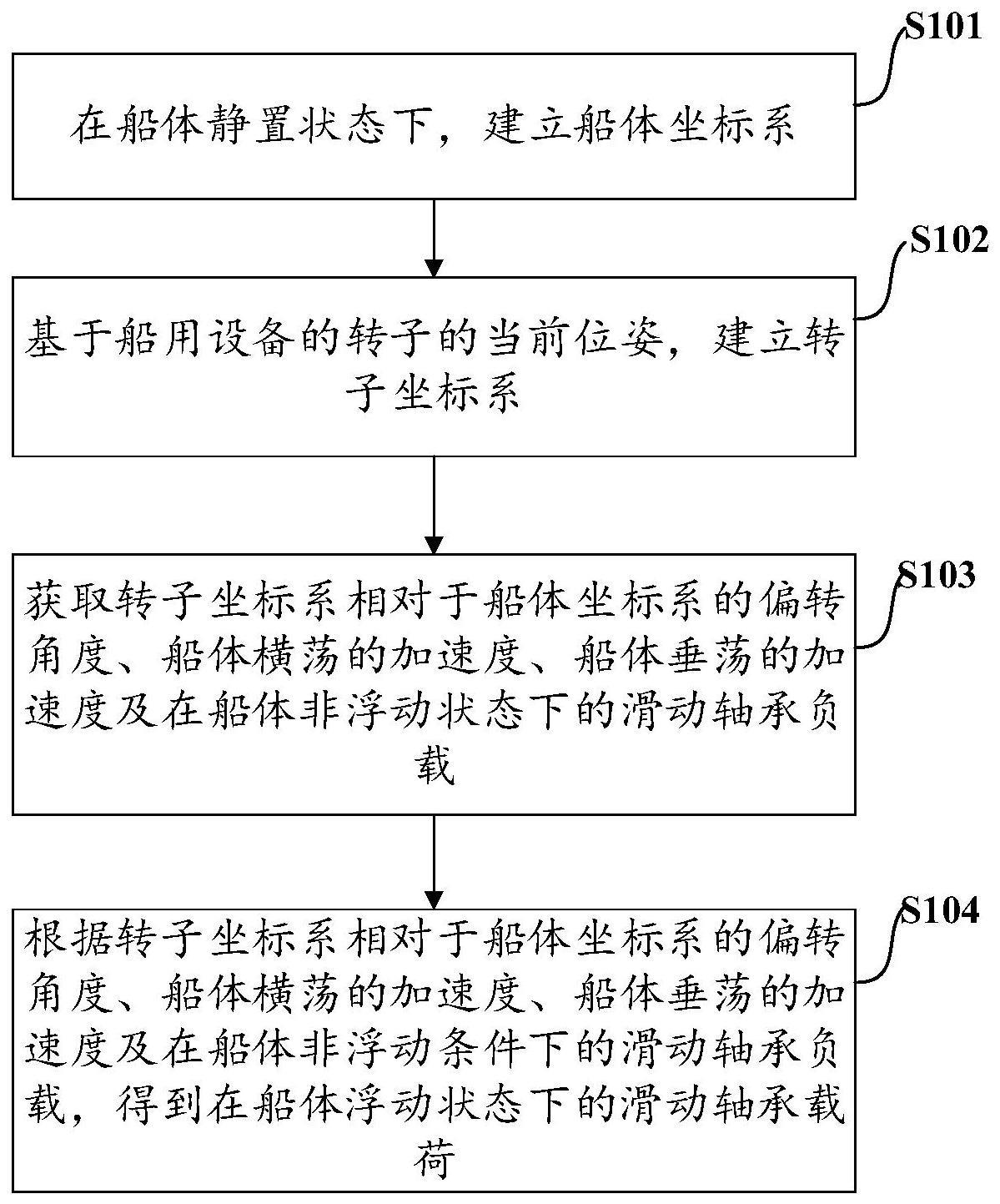
3、在船体静置状态下,建立船体坐标系;
4、基于船用设备的转子的当前位姿,建立转子坐标系;
5、获取所述转子坐标系相对于所述船体坐标系的偏转角度、所述船体横荡的加速度、所述船体垂荡的加速度及在所述船体非浮动状态下的滑动轴承负载;
6、根据所述转子坐标系相对于所述船体坐标系的偏转角度、所述船体横荡的加速度、所述船体垂荡的加速度及在所述船体非浮动条件下的滑动轴承负载,得到在所述船体浮动状态下的滑动轴承载荷。
7、可选地,所述在船体静置状态下,建立船体坐标系,包括:
8、所述船体在静置状态下,将所述船体的重心确定为原点;
9、将所述船体的基线指向船首的方向确定为z轴方向;
10、将垂直于所述船体的基线且向上的方向确定为y轴方向;
11、将垂直于所述船体的基线且向左的方向确定为x轴方向。
12、可选地,所述基于船用设备的转子的当前位姿,建立转子坐标系,包括:
13、基于所述转子的当前位姿,将所述转子的重心作为原点;
14、将所述转子的轴向确定为z轴方向;
15、将所述转子的z轴相垂直且向所述滑动轴承左右两侧延伸的方向为x轴方向;
16、将垂直于所述z轴及x轴所在平面的方向确定为y轴方向。
17、可选地,所述转子坐标系相对于所述船体坐标系的偏转角度包括在所述船体绕y轴转动作纵摇时,在y轴及z轴所在的平面上,所述y轴相对于所述y轴的第一偏转角,以及在所述船体绕x轴转动作横摇时,在x轴及y轴所在的平面上,所述y轴相对于所述y轴的第二偏转角。
18、可选地,所述根据所述转子坐标系相对于所述船体坐标系的偏转角度、所述船体横荡的加速度、所述船体垂荡的加速度及在所述船体非浮动条件下的滑动轴承负载,得到在所述船体浮动状态下的滑动轴承载荷,包括:
19、基于所述船体垂荡的加速度及在所述船体非浮动条件下的滑动轴承负载、所述第一偏转角,得到所述滑动轴承负载在y轴方向的第一分解力;
20、基于所述第二偏转角,对所述第一分解力进行分解,得到第二分解力以及第三分解力;
21、基于所述滑动轴承负载、所述船体横荡的加速度以及所述船体垂荡的加速度,对第二分解力及第三分解力进行增量处理,得到第四分解力及第五分解力;
22、基于所述第四分解力及所述第五分解力,得到在所述船体浮动状态下的滑动轴承载荷。
23、可选地,所述基于所述第四分解力及所述第五分解力,得到在所述船体浮动状态下的滑动轴承载荷之后包括:
24、基于所述第三分解力及所述第四分解力,得到在所述船体浮动状态下的滑动轴承载荷的偏转角。
25、第二方面,本发明实施例提供了一种滑动轴承载荷的确定装置,包括:
26、船体坐标系建立模块,用于在船体静置状态下,建立船体坐标系;
27、转子坐标系建立模块,用于基于船用设备的的当前位姿,建立转子坐标系;
28、获取模块,用于获取所述转子坐标系相对于所述船体坐标系的偏转角度、所述船体横荡的加速度、所述船体垂荡的加速度及在所述船体非浮动状态下的滑动轴承负载;
29、载荷确定模块,用于根据所述转子坐标系相对于所述船体坐标系的偏转角度、所述船体横荡的加速度、所述船体垂荡的加速度及在所述船体非浮动条件下的滑动轴承负载,得到在所述船体浮动状态下的滑动轴承载荷。
30、第三方面,本发明实施例提供了一种计算机设备,包括存储器、处理器以及存储在所述存储器中并可在所述处理器上运行的计算机程序,所述处理器执行所述计算机程序时实现上述滑动轴承载荷的确定方法的步骤。
31、第四方面,本发明实施例提供了一种计算机可读存储介质,所述计算机可读存储介质存储有计算机程序,所述计算机程序被处理器执行时实现上述的滑动轴承载荷的确定方法的步骤。
32、根据本发明实施例所提供的一种滑动轴承载荷的确定方法、装置、设备及介质,该方法充分考虑船体运动的影响,所得到的滑动轴承载荷与实际情况相近,提高设备运行的安全性。
技术特征:
1.一种滑动轴承载荷的确定方法,其特征在于,所述方法包括:
2.根据权利要求1所述的方法,其特征在于,所述在船体静置状态下,建立船体坐标系,包括:
3.根据权利要求2所述的方法,其特征在于,所述基于船用设备的转子的当前位姿,建立转子坐标系,包括:
4.根据权利要求3所述的方法,其特征在于,所述转子坐标系相对于所述船体坐标系的偏转角度包括在所述船体绕y轴转动作纵摇时,在y轴及z轴所在的平面上,所述y轴相对于所述y轴的第一偏转角,以及在所述船体绕x轴转动作横摇时,在x轴及y轴所在的平面上,所述y轴相对于所述y轴的第二偏转角。
5.根据权利要求4所述的方法,其特征在于,所述根据所述转子坐标系相对于所述船体坐标系的偏转角度、所述船体横荡的加速度、所述船体垂荡的加速度及在所述船体非浮动条件下的滑动轴承负载,得到在所述船体浮动状态下的滑动轴承载荷,包括:
6.根据权利要求5所述的方法,其特征在于,所述基于所述第四分解力及所述第五分解力,得到在所述船体浮动状态下的滑动轴承载荷之后包括:
7.一种滑动轴承载荷的确定装置,其特征在于,包括:
8.一种计算机设备,包括存储器、处理器以及存储在所述存储器中并可在所述处理器上运行的计算机程序,其特征在于,所述处理器执行所述计算机程序时实现如权利要求1至6任一项所述滑动轴承载荷的确定方法的步骤。
9.一种计算机可读存储介质,所述计算机可读存储介质存储有计算机程序,其特征在于,所述计算机程序被处理器执行时实现如权利要求1至6任一项所述滑动轴承载荷的确定方法的步骤。
技术总结
本发明实施例公开了一种滑动轴承载荷的确定方法、装置、设备及介质,该包括在船体静置状态下,建立船体坐标系;基于船用设备的转子的当前位姿,建立转子坐标系;获取转子坐标系相对于船体坐标系的偏转角度、船体横荡的加速度、船体垂荡的加速度及在船体非浮动状态下的滑动轴承负载;根据转子坐标系相对于船体坐标系的偏转角度、船体横荡的加速度、船体垂荡的加速度及在船体非浮动条件下的滑动轴承负载,得到在船体浮动状态下的滑动轴承载荷,由此该方法充分考虑船体运动的影响,所得到的滑动轴承载荷与实际情况相近,提高设备运行的安全性。
技术研发人员:太兴宇,张勇,杨树华,葛丽玲,孟继纲,肖忠会,于小丹,王开宇,吴天健
受保护的技术使用者:沈鼓集团股份有限公司
技术研发日:
技术公布日:2024/1/16
- 还没有人留言评论。精彩留言会获得点赞!