一种机架配准方法及配准设备与流程
本发明涉及医学影像设备领域,尤其涉及一种机架配准方法及配准设备。
背景技术:
1、在pet-ct双模态系统中结合了两种不同医学影像设备,pet提供代谢信息,pet由注入人体的fdg释放出正电子与人体内负电子湮灭产生v射线成像,fdg生化特性和葡萄糖相同,因此可以跟踪人体的对于葡萄糖的代谢信息,因此也被称为分子影像。ct提供解剖信息,ct由球管释放x射线穿过人体到达探测器成像,因此能够获得较为精确的解剖信息。pet-ct双模态系统将pet和ct结合在一起,使用同一个检查床和同一图像处理工作站,将pet图像和ct图像通过图像重建融合技术形成pet-ct融合图像,一次显像即可同时反映病灶的病理生理变化和形态结构,实现优势互补,具有灵敏度、准确、特异性高及定位精确等特点。
2、目前的pet-ct系统均设计为一台pet机与一台ct机安装在一起的形式,为了实现pet图像与ct图像更好的融合,需保证pet机架与ct机架治扫描通道方向的对准。在现有技术中,两个机架的对准主要有通过在pet机架与ct机架上加工精确配合面以实现安装时的对准,此种方式在很大程度上提高了加工难度及制造成本;另一种对准方式是通过在地面上安装支撑块并精密校准这些支撑块的高度和相互位置,以保证安装在支撑块上的pet机架与ct机架的对准,但此种校准方法十分复杂。
技术实现思路
1、为了克服上述技术缺陷,本发明的目的在于提供一种机架配准方法,用于对pet-ct双模态系统中的pet机架与ct机架进行配准。
2、本发明的目的可以通过以下技术方案实现:
3、一种机架配准方法,用于对pet-ct双模态系统中的pet机架与ct机架进行配准,包括以下步骤:
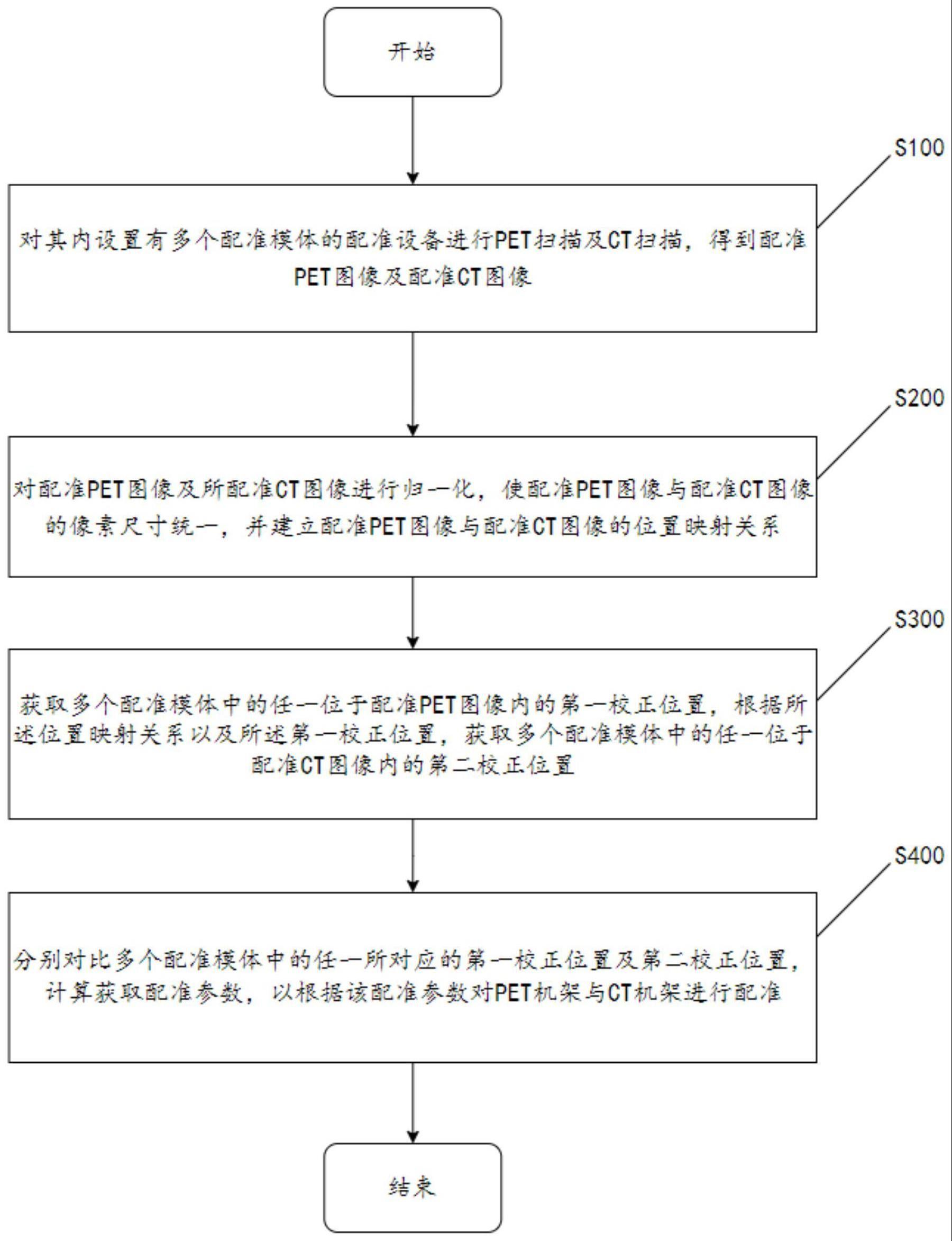
4、对其内设置有多个配准模体的配准设备进行pet扫描及ct扫描,得到配准pet图像及配准ct图像;
5、对配准pet图像及所配准ct图像进行归一化,使配准pet图像与配准ct图像的像素尺寸统一,并建立配准pet图像与配准ct图像的位置映射关系;
6、获取多个配准模体中的任一位于配准pet图像内的第一校正位置,根据所述位置映射关系以及所述第一校正位置,获取多个配准模体中的任一位于配准ct图像内的第二校正位置;
7、分别对比多个配准模体中的任一所对应的第一校正位置及第二校正位置,计算获取配准参数,以根据该配准参数对pet机架与ct机架进行配准。
8、优选地,获取多个配准模体中的任一位于配准pet图像内的第一校正位置,包括:
9、对配准pet图像进行边缘检测及形状提取,获取多个配准模体中的任一位于配准pet图像内的第一初始位置;
10、根据多个配准模体中的任一所对应的第一初始位置,获取多个配准模体中的任一位于所述pet图像内所在的第一三维感兴趣区域;
11、根据多个配准模体中的任一所对应的第一三维感兴趣区域,通过重心法获取多个配准模体中的任一位于配准pet图像内的第一校正位置。
12、优选地,获取所述多个配准模体中的任一位于所述配准ct图像内的第二校正位置,包括:
13、根据多个配准模体中的任一所对应的第一校正位置,以及配准pet图像与配准ct图像的位置映射关系,获取多个配准模体中的任一位于配准ct图像内所在的第二三维感兴趣区域;
14、根据多个配准模体中的任一所对应的第二三维感兴趣区域,通过梯度变化检测获取多个配准模体中的任一位于配准ct图像内的第二校正位置。
15、优选地,获取多个配准模体中的任一位于配准pet图像内的第一初始位置,包括:
16、使用canny算子对配准pet图像进行边缘检测,获取边缘筛选图像;
17、根据多个配准模体中的任一的形态学特征,使用hough变换对边缘筛选图像进行形状提取,获取多个配准模体中的任一位于边缘筛选图像内的坐标,作为多个配准模体中的任一位于配准pet图像内的第一初始位置。
18、优选地,获取多个配准模体中的任一位于配准pet图像内所在的第一三维感兴趣区域,包括:
19、以多个配准模体中的任一所对应的第一初始位置为基准,在配准pet图像内向三维分别扩张n个像素,获取多个配准模体中的任一位于配准pet图像内所在的第一三维感兴趣区域。
20、优选地,获取多个配准模体中的任一位于配准ct图像内所在的第二三维感兴趣区域,包括:
21、根据多个配准模体中的任一所对应的第一校正位置,以及配准pet图像与配准ct图像的位置映射关系,获取多个配准模体中的任一位于配准ct图像内的第二初始位置;
22、以多个配准模体中的任一所对应的第二初始位置为基准,在配准ct图像内向三维分别扩张n个像素,获取多个配准模体中的任一位于配准ct图像内所在的第二三维感兴趣区域。
23、优选地,计算获取配准参数,包括:
24、分别对比多个配准模体中的任一所对应的第一校正位置及第二校正位置,获取多个配准模体中的任一所对应的平移向量,对多个平移向量取均值获取平移配准参数;
25、分别对比多个配准模体中的任一所对应的第一校正位置及第二校正位置,获取多个配准模体中的任一所对应的旋转向量,对多个旋转向量取均值获取旋转配准参数。
26、优选地,计算获取配准参数,还包括:
27、获取配准pet图像的第一轴向长度与配准ct图像的第二轴向长度,计算获取第一轴向长度与所述第二轴向长度的差值,基于该差值对平移配准参数在轴向维度上进行补偿。
28、本发明还公开了一种配准设备,用于前述的机架配准方法,包括多个配准模体与一支持底座,支持底座由密度低于第一期望密度的物质组成,支持底座的大小与pet-ct双模态系统的扫描视野一致,多个配准模体放置于支持底座之内。
29、采用了上述技术方案后,与现有技术相比,具有以下有益效果:
30、1.简单方便地进行ct机架和pet机架的对准安装,并可消除pet-ct双模态系统中心组件加工与安装误差的影响,提高对准精度;
31、2.以配准设备构建稳定的立体模型提供三维空间内配准参数,避免单个方向上的配准出现误差的情况;
32、3.添加三维坐标的角度分量用于配准,避免因预先校准不理想或者长期使用后起始角发生偏离,从而导致最终的配准结果在平面的不同方向和不同区域出现误差分布不一致现象。
技术特征:
1.一种机架配准方法,用于对pet-ct双模态系统中的pet机架与ct机架进行配准,其特征在于,包括以下步骤:
2.根据权利要求1所述的机架配准方法,其特征在于,所述获取所述多个配准模体中的任一位于所述配准pet图像内的第一校正位置,包括:
3.根据权利要求2所述的机架配准方法,其特征在于,所述获取所述多个配准模体中的任一位于所述配准ct图像内的第二校正位置,包括:
4.根据权利要求2所述的机架配准方法,其特征在于,所述获取所述多个配准模体中的任一位于所述配准pet图像内的第一初始位置,包括:
5.根据权利要求2所述的机架配准方法,其特征在于,所述获取所述多个配准模体中的任一位于所述配准pet图像内所在的第一三维感兴趣区域,包括:
6.根据权利要求3所述的机架配准方法,其特征在于,所述获取所述多个配准模体中的任一位于所述配准ct图像内所在的第二三维感兴趣区域,包括:
7.根据权利要求1所述的机架配准方法,其特征在于,所述计算获取配准参数,包括:
8.根据权利要求7所述的机架配准方法,其特征在于,所述计算获取配准参数,还包括:
9.一种配准设备,用于如权利要求1-7所述的机架配准方法,其特征在于,包括多个配准模体与一支持底座,所述支持底座由密度低于第一期望密度的物质组成,所述支持底座的大小与所述pet-ct双模态系统的扫描视野一致,所述多个配准模体放置于所述支持底座之内。
技术总结
本发明提供了一种一种机架配准方法和配准设备,包括以下步骤:对其内设置有多个配准模体的配准设备扫描得到配准PET图像及配准CT图像,建立配准PET图像与配准CT图像的位置映射关系;获取多个配准模体中的任一位于配准PET图像内的第一校正位置,根据位置映射关系以及第一校正位置,获取多个配准模体中的任一位于配准CT图像内的第二校正位置;分别对比多个配准模体中的任一所对应的第一校正位置及第二校正位置,计算获取配准参数,以根据该配准参数对PET机架与CT机架进行配准。采用上述技术方案后,可以简单方便地进行CT机架和PET机架的对准安装,提供三维空间配准参数并添加角度分量避免各方向上的配准出现误差的情况。
技术研发人员:孙爽,高思泽,叶宏伟,王瑶法
受保护的技术使用者:明峰医疗系统股份有限公司
技术研发日:
技术公布日:2024/1/16
- 还没有人留言评论。精彩留言会获得点赞!