一种飞行器飞行振动数据分类方法与流程
本发明涉及环境适应性,尤其涉及一种飞行器飞行振动数据分类方法。
背景技术:
1、关于飞行器振动环境的计算,gjb150a中规定了计算导弹和喷气式飞机振动的经验公式,但在实际应用中,对于亚声速飞行器可以使用gjb150a中的计算公式,但对于超声速飞行器,其不同飞行阶段的振动数据会存在较大差异,通过gjb150a计算的结果与实际飞行测量结果差异很大,这主要是由于在不同飞行阶段的振动激励源存在较大差别,如助推飞行阶段,飞行器的激励源主要为助推器,主发动机工作段时的激励源主要是主发动机和气动噪声,而主发动机又分为固体冲压发动机、液体冲压发动机、涡喷、涡扇发动机等多种形式,在助推器和主发动机都不工作时,飞行器处于无动力阶段,振动激励源则只是气动噪声。正是由于不同飞行阶段激励源的差异,造成飞行振动响应也存在较大差异,如果将各阶段振动混合在一起进行归纳,势必会造成归纳的振动试验条件过于严酷的现象,为避免这种情况,必须对振动数据根据飞行阶段进行分类。
技术实现思路
1、本发明提供了一种飞行器飞行振动数据分类方法,能够解决现有技术中缺乏超声速飞行器振动环境经验公式或工程计算方法导致难以确定振动环境的技术问题。
2、根据本发明的一方面,提供了一种飞行器飞行振动数据分类方法,方法包括:
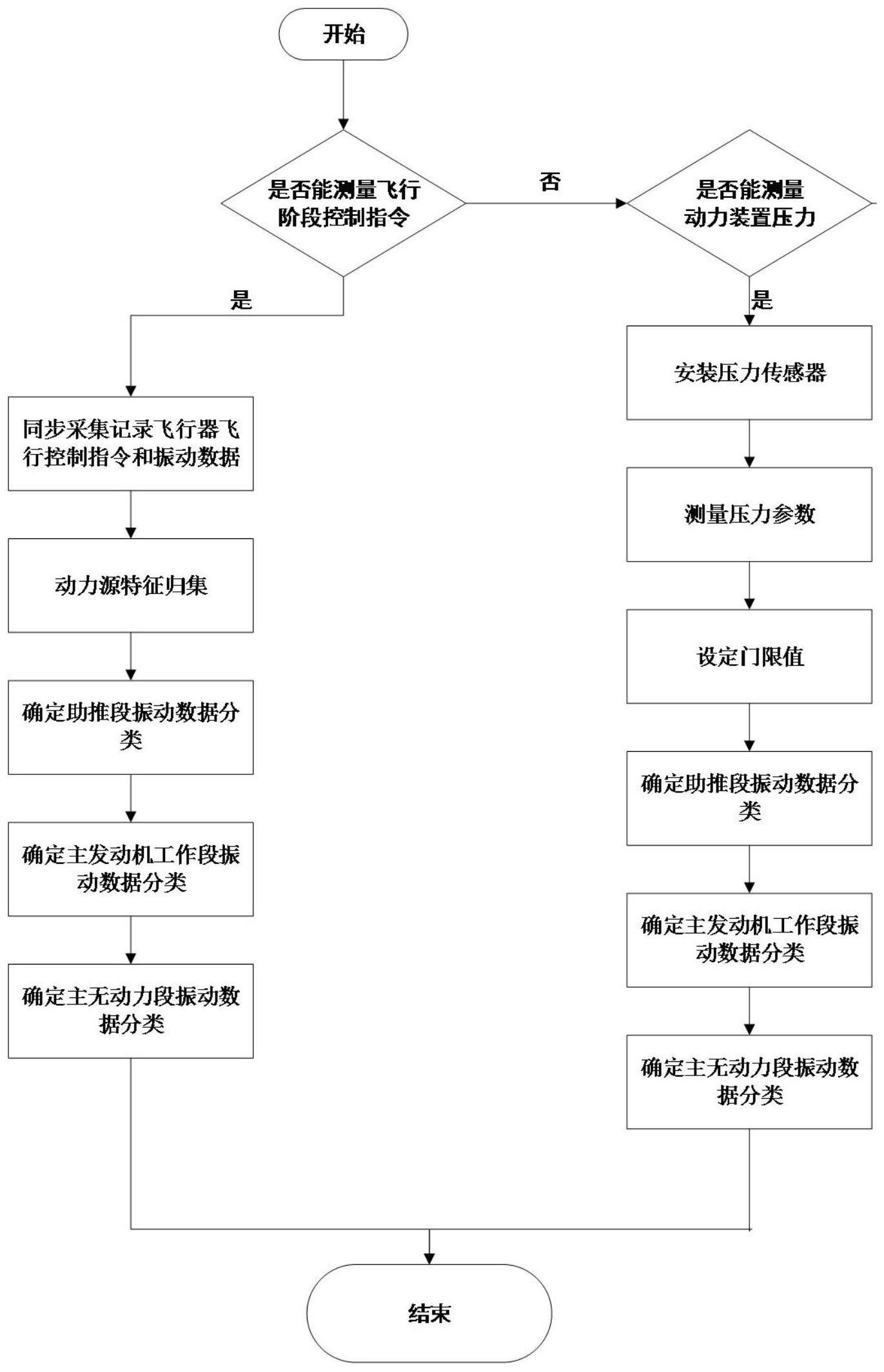
3、s1,判断是否具备飞行控制指令测量条件和动力源工作压力测量条件,且在具备飞行控制指令测量条件时转至s2,在不具备飞行控制指令测量条件而具备动力源工作压力测量条件时转至s3;
4、s2,同步采集飞行器飞行过程中的飞行控制指令和振动数据,根据动力源特征对动力源进行归集处理,根据飞行控制指令和动力源归集处理结果对振动数据进行分类;
5、s3,同步采集飞行器飞行过程中的动力源工作压力和振动数据,确定动力源工作压力分类门限值,根据采集的动力源工作压力和动力源工作压力分类门限值对振动数据进行分类。
6、进一步地,采集的飞行控制指令包括每级助推器的点火指令和脱落指令以及主发动机每次启停的点火指令和关机指令。
7、进一步地,根据动力源特征对动力源进行归集处理包括:
8、根据装药和推力脉动特性对多级助推器进行归集处理以得到一类或多类助推器激励源;
9、将主发动机的所有启停归集为一类主发动机激励源。
10、进一步地,根据飞行控制指令和动力源归集处理结果对振动数据进行分类包括:
11、将一类助推器激励源中的第一个点火指令对应时刻作为该类助推激励源的助推段开始时刻,最后一个脱落指令对应时刻作为该类助推器激励源的助推段结束时刻,将该类助推器激励源的助推段开始时刻至该类助推器激励源的助推段结束时刻对应的振动数据划分为该类助推器激励源的助推段振动数据;
12、将主发动机的第n个点火指令对应时刻作为主发动机第n个工作段开始时刻,第n个关机指令作为主发动机第n个工作段结束时刻,将主发动机第n个工作段开始时刻至主发动机第n个工作段结束时刻对应的振动数据划分为主发动机激励源的第n个工作段振动数据,其中,n为大于等于1的整数;
13、将除了助推段振动数据和主发动机工作段振动数据之外的振动数据划分为无动力段振动数据。
14、进一步地,采集的动力源工作压力包括助推器燃烧压力和主发动机燃烧压力。
15、进一步地,确定动力源工作压力分类门限值包括确定助推器燃烧压力分类门限值和主发动机燃烧压力分类门限值。
16、进一步地,通过以下公式确定助推器燃烧压力分类门限值和主发动机燃烧压力分类门限值:
17、p1lim=k1*pmax1;
18、p2lim=k2*pmax2;
19、上式中,pmax1表示助推器的最大燃烧压力,p1lim表示助推器燃烧压力分类门限值,k1表示助推器燃烧压力分类系数,pmax2表示主发动机的最大燃烧压力,p2lim表示主发动机燃烧压力分类门限值,k2表示主发动机燃烧压力分类系数。
20、进一步地,根据采集的动力源工作压力和动力源工作压力分类门限值对振动数据进行分类包括:
21、将助推器燃烧压力第一次大于助推器燃烧压力分类门限值的时刻作为助推段开始时刻,将助推器燃烧压力最后一次大于助推器燃烧压力分类门限值的时刻作为助推段结束时刻,将助推段开始时刻至助推段结束时刻对应的振动数据作为助推段振动数据;
22、将主发动机燃烧压力在第n-1个工作段结束时刻之后第1次大于主发动机燃烧压力分类门限值的时刻作为主发动机第n个工作段开始时刻,将主发动机燃烧压力在第n个工作段开始时刻之后第1次小于主发动机燃烧压力分类门限值的时刻作为主发动机第n个工作段结束时刻,将主发动机第n个工作段开始时刻至主发动机第n个工作段结束时刻对应的振动数据划分为主发动机第n个工作段振动数据;
23、将除了助推段振动数据和主发动机工作段振动数据之外的振动数据划分为无动力段振动数据。
24、进一步地,助推器燃烧压力分类系数的取值范围为0.2≤k1≤0.3。
25、进一步地,主发动机燃烧压力分类系数的取值范围为0.2≤k2≤0.3。
26、应用本发明的技术方案,提供了一种飞行器飞行振动数据分类方法,该方法通过在能够进行飞行控制指令测量时,同步采集飞行控制指令和振动数据,根据动力源特征对动力源进行归集处理,根据飞行控制指令和动力源归集处理结果对振动数据进行分类;在不具备飞行控制指令测量条件而具备动力源工作压力测量条件时,同步采集飞行器飞行过程中的动力源工作压力和振动数据,根据动力源工作压力和设置的门限值对振动数据进行分类,能够将超声速飞行器飞行过程中不同阶段的振动数据进行合理分类,进而能够根据不同阶段的振动数据归纳得到不同阶段的振动试验条件,填补超声速飞行器振动环境确定方法的空白,该方法能够推广至各种亚声速和超声速飞行器的振动环境预示中。与现有技术相比,本发明的技术方案能够解决现有技术中缺乏超声速飞行器振动环境经验公式或工程计算方法导致难以确定振动环境的技术问题。
技术特征:
1.一种飞行器飞行振动数据分类方法,其特征在于,所述方法包括:
2.根据权利要求1所述的方法,其特征在于,采集的飞行控制指令包括每级助推器的点火指令和脱落指令以及主发动机每次启停的点火指令和关机指令。
3.根据权利要求2所述的方法,其特征在于,根据动力源特征对动力源进行归集处理包括:
4.根据权利要求3所述的方法,其特征在于,根据飞行控制指令和动力源归集处理结果对振动数据进行分类包括:
5.根据权利要求1所述的方法,其特征在于,采集的动力源工作压力包括助推器燃烧压力和主发动机燃烧压力。
6.根据权利要求5所述的方法,其特征在于,确定动力源工作压力分类门限值包括确定助推器燃烧压力分类门限值和主发动机燃烧压力分类门限值。
7.根据权利要求6所述的方法,其特征在于,通过以下公式确定助推器燃烧压力分类门限值和主发动机燃烧压力分类门限值:
8.根据权利要求7所述的方法,其特征在于,根据采集的动力源工作压力和动力源工作压力分类门限值对振动数据进行分类包括:
9.根据权利要求8所述的方法,其特征在于,助推器燃烧压力分类系数的取值范围为0.2≤k1≤0.3。
10.根据权利要求9所述的方法,其特征在于,主发动机燃烧压力分类系数的取值范围为0.2≤k2≤0.3。
技术总结
本发明提供了一种飞行器飞行振动数据分类方法,该方法包括:在具备飞行控制指令测量条件时,同步采集飞行器飞行过程中的飞行控制指令和振动数据,根据动力源特征对动力源进行归集处理,根据飞行控制指令和动力源归集处理结果对振动数据进行分类;在不具备飞行控制指令测量条件而具备动力源工作压力测量条件时,同步采集飞行器飞行过程中的动力源工作压力和振动数据,确定动力源工作压力分类门限值,根据采集的动力源工作压力和动力源工作压力分类门限值对振动数据进行分类。应用本发明的技术方案,以解决现有技术中缺乏超声速飞行器振动环境经验公式或工程计算方法导致难以确定振动环境的技术问题。
技术研发人员:庞勇,韩苍芹,张青虎
受保护的技术使用者:北京机电工程研究所
技术研发日:
技术公布日:2024/1/15
- 还没有人留言评论。精彩留言会获得点赞!