一种三维流场模拟方法、系统及电子设备与流程
本发明涉及环境模拟领域,特别是涉及一种基于地理环境与光滑粒子耦合的三维流场模拟方法、系统及电子设备。
背景技术:
1、流场可视分析有利于地理环境专业知识科学表达与共享,帮助研究者对地理环境现状分布和时空变化规律有较为直观的理解,有效提高人们对时空规律的认知效能。近年来,粒子系统在复杂流场三维可视化过程中得到广泛研究,利用粒子离散化表达现实世界,在水动力矢量场可视化方面,国内外学者围绕流场数据动态模拟和仿真方面开展了大量研究,尤其在海洋水环境三维流场可视化方面开展了诸多研究和应用。
2、但是,湖泊中小尺度流场可视分析缺乏研究。一方面,湖泊流场极易受到外部水文、气象环境等条件的影响,导致大气或水环境流场稳定性差、规律特征不明显,三维可视分析较为困难。另一方面,在中小尺度下,湖泊水环境流场可视分析对精度要求更高,如果仅仅考虑宏观欧拉网格速度场,将导致分析结果与实际情况产生偏差。因此,需要从微观角度进行三维流场物理过程仿真模拟和试验验证。
技术实现思路
1、本发明的目的是提供一种三维流场模拟方法、系统及电子设备,可提高湖泊三维流场的模拟精度。
2、为实现上述目的,本发明提供了如下方案:
3、一种三维流场模拟方法,包括:
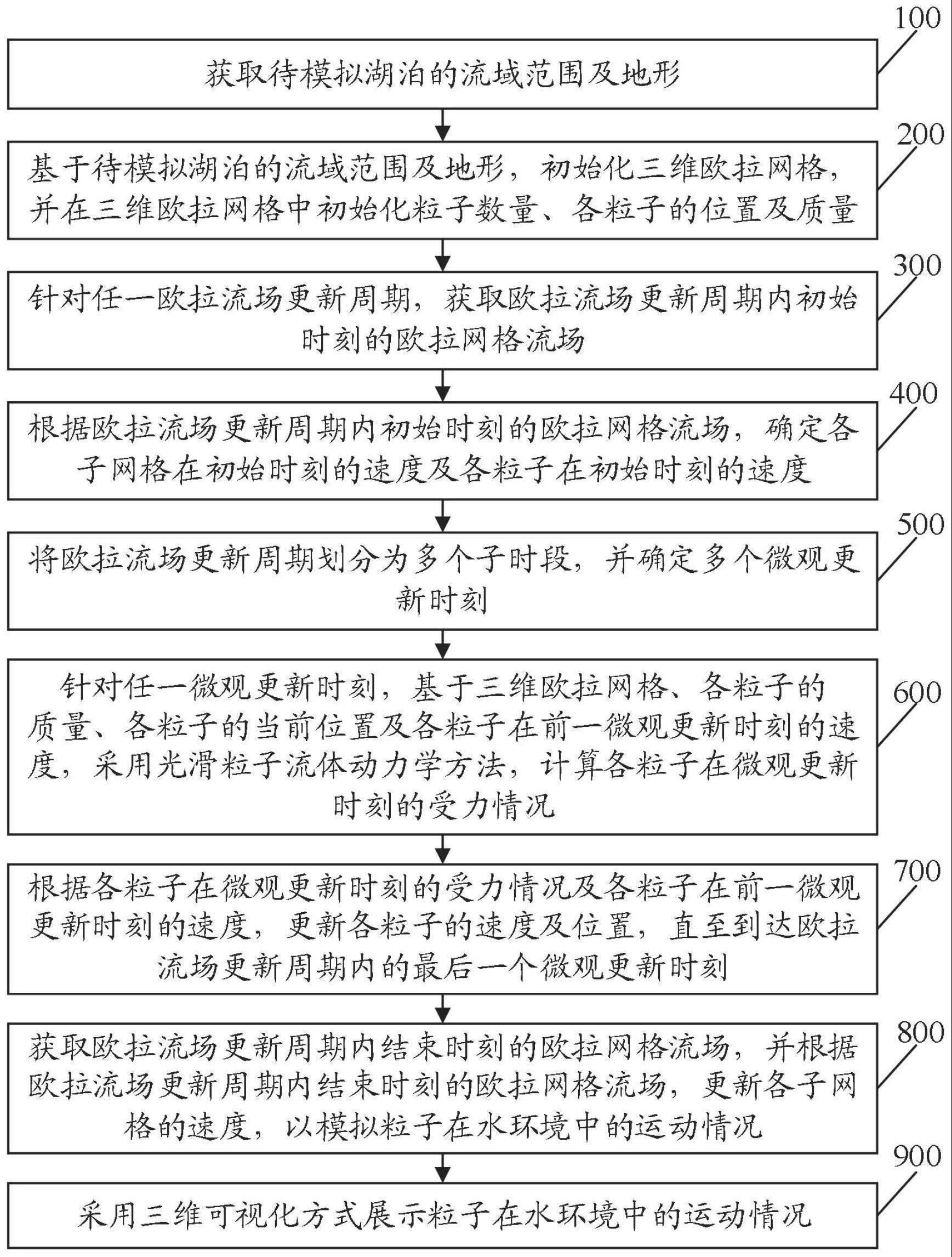
4、获取待模拟湖泊的流域范围及地形;
5、基于所述待模拟湖泊的流域范围及地形,初始化三维欧拉网格,并在所述三维欧拉网格中初始化粒子数量、各粒子的位置及质量;所述三维欧拉网格包括多个子网格;
6、针对任一欧拉流场更新周期,获取所述欧拉流场更新周期内初始时刻的欧拉网格流场;
7、根据所述欧拉流场更新周期内初始时刻的欧拉网格流场,确定各子网格在初始时刻的速度及各粒子在初始时刻的速度;
8、将所述欧拉流场更新周期划分为多个子时段,并确定多个微观更新时刻;
9、针对任一微观更新时刻,基于所述三维欧拉网格、各粒子的质量、各粒子的当前位置及各粒子在前一微观更新时刻的速度,采用光滑粒子流体动力学方法,计算各粒子在所述微观更新时刻的受力情况;
10、根据各粒子在所述微观更新时刻的受力情况及各粒子在前一微观更新时刻的速度,更新各粒子的速度及位置,直至到达所述欧拉流场更新周期内的最后一个微观更新时刻;
11、获取所述欧拉流场更新周期内结束时刻的欧拉网格流场,并根据所述欧拉流场更新周期内结束时刻的欧拉网格流场,更新各子网格的速度,以模拟粒子在水环境中的运动情况。
12、为实现上述目的,本发明还提供了如下方案:
13、一种三维流场模拟系统,包括:
14、湖泊数据获取模块,用于获取待模拟湖泊的流域范围及地形;
15、网格粒子初始化模块,用于基于所述待模拟湖泊的流域范围及地形,初始化三维欧拉网格,并在所述三维欧拉网格中初始化粒子数量、各粒子的位置及质量;所述三维欧拉网格包括多个子网格;
16、流场获取模块,用于针对任一欧拉流场更新周期,获取所述欧拉流场更新周期内初始时刻的欧拉网格流场;
17、速度初始化模块,用于根据所述欧拉流场更新周期内初始时刻的欧拉网格流场,确定各子网格在初始时刻的速度及各粒子在初始时刻的速度;
18、时段划分模块,用于将所述欧拉流场更新周期划分为多个子时段,并确定多个微观更新时刻;
19、受力计算模块,用于针对任一微观更新时刻,基于所述三维欧拉网格、各粒子的质量、各粒子的当前位置及各粒子在前一微观更新时刻的速度,采用光滑粒子流体动力学方法,计算各粒子在所述微观更新时刻的受力情况;
20、微观更新模块,用于根据各粒子在所述微观更新时刻的受力情况及各粒子在前一微观更新时刻的速度,更新各粒子的速度及位置,直至到达所述欧拉流场更新周期内的最后一个微观更新时刻;
21、宏观更新模块,用于获取所述欧拉流场更新周期内结束时刻的欧拉网格流场,并根据所述欧拉流场更新周期内结束时刻的欧拉网格流场,更新各子网格的速度,以模拟粒子在水环境中的运动情况。
22、为实现上述目的,本发明还提供了如下方案:
23、一种电子设备,包括存储器及处理器,所述存储器用于存储计算机程序,所述处理器运行所述计算机程序以使所述电子设备执行上述的三维流场模拟方法。
24、根据本发明提供的具体实施例,本发明公开了以下技术效果:
25、本发明结合欧拉与拉格朗日方法进行流场模拟,宏观上,通过三维欧拉流场更新各子网格的速度,并确定各粒子在初始时刻的速度,微观上,在欧拉流场更新周期内,利用光滑粒子流体动力学方法计算各粒子的受力情况,进而根据粒子的受力情况更新各粒子的速度及位置,实现水环境污染物扩散和沉积物集聚过程的模拟,提高了湖泊三维流场的模拟精度。
技术特征:
1.一种三维流场模拟方法,其特征在于,所述三维流场模拟方法包括:
2.根据权利要求1所述的三维流场模拟方法,其特征在于,所述受力情况包括粒子的密度、粒子所受的粘性力及粒子所受的压力。
3.根据权利要求2所述的三维流场模拟方法,其特征在于,采用以下公式计算粒子i的密度:
4.根据权利要求3所述的三维流场模拟方法,其特征在于,采用以下公式计算粒子i所受的粘性力:
5.根据权利要求4所述的三维流场模拟方法,其特征在于,采用以下公式计算粒子i所受的压力:
6.根据权利要求2所述的三维流场模拟方法,其特征在于,根据各粒子在所述微观更新时刻的受力情况及各粒子在前一微观更新时刻的速度,更新各粒子的速度及位置,直至到达所述欧拉流场更新周期内的最后一个微观更新时刻,具体包括:
7.根据权利要求6所述的三维流场模拟方法,其特征在于,采用以下公式计算粒子i在t时刻的速度:
8.根据权利要求1所述的三维流场模拟方法,其特征在于,所述三维流场模拟方法还包括:
9.一种三维流场模拟系统,其特征在于,应用于权利要求1至8任一项所述的三维流场模拟方法,所述三维流场模拟系统包括:
10.一种电子设备,其特征在于,包括存储器及处理器,所述存储器用于存储计算机程序,所述处理器运行所述计算机程序以使所述电子设备执行权利要求1至8中任一项所述的三维流场模拟方法。
技术总结
本发明提供了一种三维流场模拟方法、系统及电子设备,属于环境模拟领域,方法包括:基于待模拟湖泊的流域范围及地形初始化三维欧拉网格、粒子数量、各粒子的位置及质量;获取欧拉流场更新周期内初始时刻的欧拉网格流场,以确定各子网格在初始时刻的速度及各粒子在初始时刻的速度;将欧拉流场更新周期划分为多个子时段,确定多个微观更新时刻;针对任一微观更新时刻,采用光滑粒子流体动力学方法计算各粒子在微观更新时刻的受力情况,进而更新各粒子的速度及位置;获取欧拉流场更新周期内结束时刻的欧拉网格流场,以更新各子网格的速度,以模拟粒子在水环境中的运动情况。本发明提高了湖泊三维流场的模拟精度。
技术研发人员:何望君,石丽红,张福浩,蔡鹏,廖振良
受保护的技术使用者:中国测绘科学研究院
技术研发日:
技术公布日:2024/1/16
- 还没有人留言评论。精彩留言会获得点赞!