一种植物区长势识别方法及系统与流程
本发明涉及植物长势判断,具体是一种植物区长势识别方法及系统。
背景技术:
1、植物是地球上最重要的生命形式之一,它们为人类提供了食物、氧气、药物、纤维、木材等多种资源和服务。没有植物,人类将无法生存。如果没有植物,人类将面临严重的空气污染和缺氧的危险。大气中的二氧化碳会不断增加,导致温室效应加剧,地球温度升高。同时,大气中的氧气会不断减少,使得人类呼吸困难。因此,人类需要有意识的对植物进行保护。
2、在现有技术背景下,对植物区域的保护过程一般由工作人员配合无人机主动完成,这一过程的操作主体是工作人员,灵活度高但工作量大,适合全盘检测,但不适合快速检测,如何提供一种便捷度高的快速检测方案是本发明技术方案想要解决的技术问题。
技术实现思路
1、本发明的目的在于提供一种植物区长势识别方法及系统,以解决上述背景技术中提出的问题。
2、为实现上述目的,本发明提供如下技术方案:
3、一种植物区长势识别方法,所述方法包括:
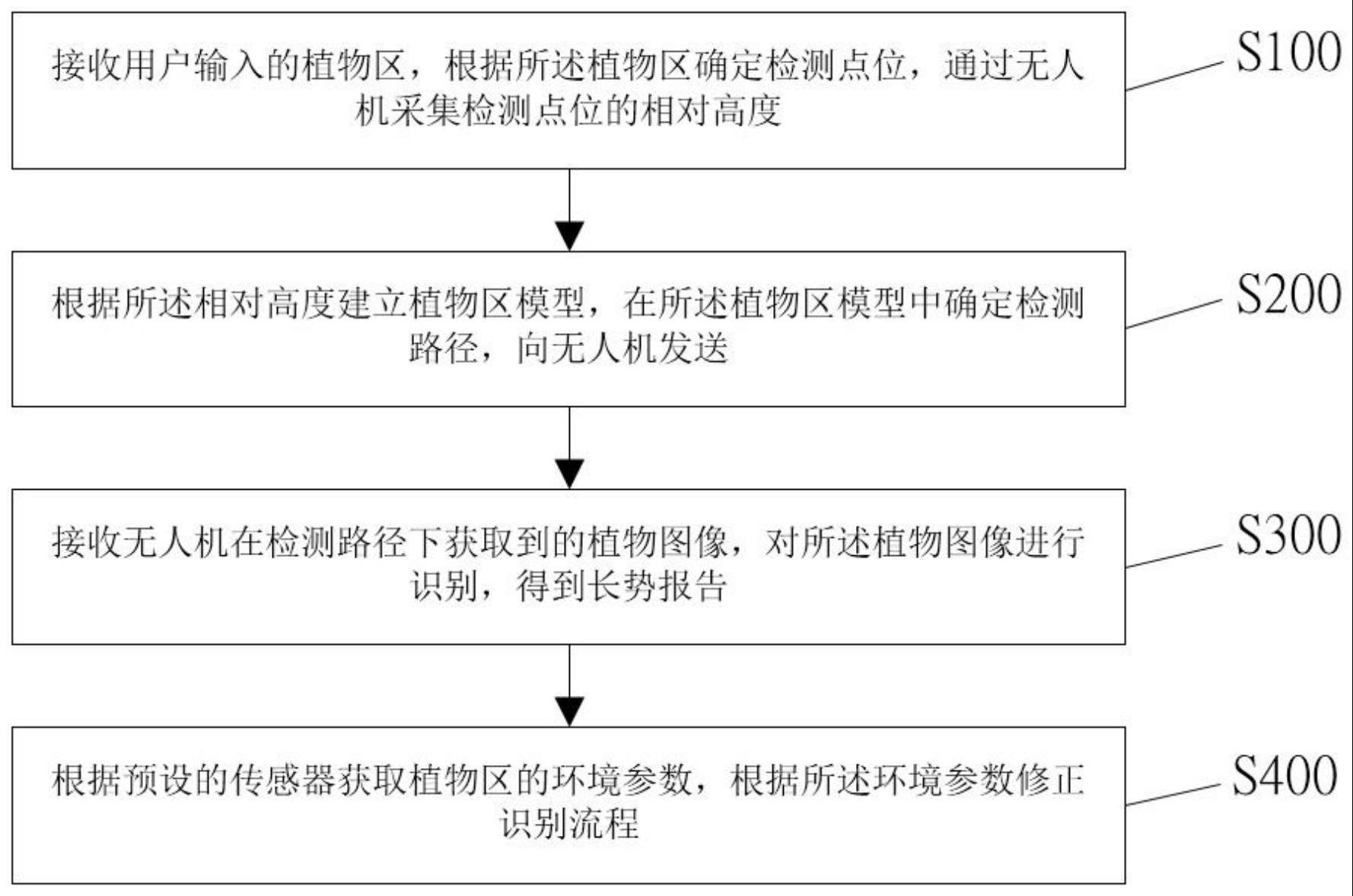
4、接收用户输入的植物区,根据所述植物区确定检测点位,通过无人机采集检测点位的相对高度;其中,高度采集过程中,无人机的绝对高度的波动范围小于预设的数据条件;
5、根据所述相对高度建立植物区模型,在所述植物区模型中确定检测路径,向无人机发送;
6、接收无人机在检测路径下获取到的植物图像,对所述植物图像进行识别,得到长势报告;
7、根据预设的传感器获取植物区的环境参数,根据所述环境参数修正识别流程。
8、作为本发明进一步的方案:所述接收用户输入的植物区,根据所述植物区确定检测点位,通过无人机采集检测点位的相对高度的步骤包括:
9、接收用户输入的边界坐标,根据所述边界坐标拟合植物区;
10、获取显示设备的设备参数,根据所述设备参数确定模型精度范围,接收用户的选取信息,基于所述选取信息在所述模型精度范围内确定最终精度;
11、根据所述最终精度确定检测点位;
12、向无人机发送指向所述检测点位的工作指令,接收无人机反馈的检测点位的相对高度;其中,所述相对高度由内置于无人机的测距模块获取得到。
13、作为本发明进一步的方案:所述根据所述相对高度建立植物区模型,在所述植物区模型中确定检测路径,向无人机发送的步骤包括:
14、根据边界坐标创建基准三维模型;
15、基于检测点位的坐标统计所有相对高度,得到三维坐标点;
16、连接并拟合所述三维坐标点,建立植物区模型;
17、显示所述植物区模型,接收用户输入的检测路径,向无人机发送。
18、作为本发明进一步的方案:所述显示所述植物区模型,接收用户输入的检测路径,向无人机发送的步骤包括:
19、显示所述植物区模型,接收用户输入的区域标记;
20、基于所述区域标记创建检测路径,接收用户输入的调节信息;
21、根据所述调节信息确定最终路径,向无人机发送;
22、其中,所述区域标记至少包括隔断区和必经区;预设的参考物对应其中一个必经区。
23、作为本发明进一步的方案:所述接收无人机在检测路径下获取到的植物图像,对所述植物图像进行识别,得到长势报告的步骤包括:
24、接收无人机在检测路径下获取到的植物图像,根据所述区域标记对植物图像进行分类;
25、读取参考物对应的植物图像,将所述植物图像与参考物对应的标准图像计算变化图层;所述变化图层中像素点的参数包括色调、饱和度和明度;所述变化图层为所有图像比对过程的均值特征;
26、基于所述变化图层对非参考物对应的植物图像进行修正,得到修正图像;
27、将所述修正图像输入训练好的神经网络识别模型中,输出长势报告。
28、作为本发明进一步的方案:所述根据预设的传感器获取植物区的环境参数,根据所述环境参数修正识别流程的步骤包括:
29、基于预设的传感器获取植物区的环境参数;
30、统计所有长势报告,计算长势偏差,根据所述环境参数验证所述长势偏差;所述长势偏差用于表征与标准长势的差距;
31、根据验证结果修正变化图层和神经网络识别模型。
32、本发明技术方案还提供了一种植物区长势识别系统,所述系统包括:
33、高度采集模块,用于接收用户输入的植物区,根据所述植物区确定检测点位,通过无人机采集检测点位的相对高度;其中,高度采集过程中,无人机的绝对高度的波动范围小于预设的数据条件;
34、路径发送模块,用于根据所述相对高度建立植物区模型,在所述植物区模型中确定检测路径,向无人机发送;
35、图像识别模块,用于接收无人机在检测路径下获取到的植物图像,对所述植物图像进行识别,得到长势报告;
36、识别流程修正模块,用于根据预设的传感器获取植物区的环境参数,根据所述环境参数修正识别流程。
37、作为本发明进一步的方案:所述高度采集模块包括:
38、接收用户输入的边界坐标,根据所述边界坐标拟合植物区;
39、获取显示设备的设备参数,根据所述设备参数确定模型精度范围,接收用户的选取信息,基于所述选取信息在所述模型精度范围内确定最终精度;
40、根据所述最终精度确定检测点位;
41、向无人机发送指向所述检测点位的工作指令,接收无人机反馈的检测点位的相对高度;其中,所述相对高度由内置于无人机的测距模块获取得到。
42、作为本发明进一步的方案:所述路径发送模块包括:
43、基准模型创建单元,用于根据边界坐标创建基准三维模型;
44、三维点位确定单元,用于基于检测点位的坐标统计所有相对高度,得到三维坐标点;
45、点位拟合单元,用于连接并拟合所述三维坐标点,建立植物区模型;
46、路径接收单元,用于显示所述植物区模型,接收用户输入的检测路径,向无人机发送。
47、作为本发明进一步的方案:所述路径接收单元包括:
48、标记接收子单元,用于显示所述植物区模型,接收用户输入的区域标记;
49、调节子单元,用于基于所述区域标记创建检测路径,接收用户输入的调节信息;
50、选取子单元,用于根据所述调节信息确定最终路径,向无人机发送;
51、其中,所述区域标记至少包括隔断区和必经区;预设的参考物对应其中一个必经区。
52、与现有技术相比,本发明的有益效果是:本发明通过无人机获取高度数据,创建植物区模型,基于所述植物区模型确定检测路径,使得无人机在检测路径下不断地获取植物图像,再借助现有的神经网络模型对所述植物图像进行识别,输出长势报告;在此过程中,引入传感器,对识别过程进行修正;在保证识别准度的前提下,极大地提高了识别效率。
技术特征:
1.一种植物区长势识别方法,其特征在于,所述方法包括:
2.根据权利要求1所述的植物区长势识别方法,其特征在于,所述接收用户输入的植物区,根据所述植物区确定检测点位,通过无人机采集检测点位的相对高度的步骤包括:
3.根据权利要求2所述的植物区长势识别方法,其特征在于,所述根据所述相对高度建立植物区模型,在所述植物区模型中确定检测路径,向无人机发送的步骤包括:
4.根据权利要求3所述的植物区长势识别方法,其特征在于,所述显示所述植物区模型,接收用户输入的检测路径,向无人机发送的步骤包括:
5.根据权利要求4所述的植物区长势识别方法,其特征在于,所述接收无人机在检测路径下获取到的植物图像,对所述植物图像进行识别,得到长势报告的步骤包括:
6.根据权利要求1所述的植物区长势识别方法,其特征在于,所述根据预设的传感器获取植物区的环境参数,根据所述环境参数修正识别流程的步骤包括:
7.一种植物区长势识别系统,其特征在于,所述系统包括:
8.根据权利要求7所述的植物区长势识别系统,其特征在于,所述高度采集模块包括:
9.根据权利要求7所述的植物区长势识别系统,其特征在于,所述路径发送模块包括:
10.根据权利要求9所述的植物区长势识别系统,其特征在于,所述路径接收单元包括:
技术总结
本发明涉及植物长势判断技术领域,具体公开了一种植物区长势识别方法及系统,所述方法包括接收用户输入的植物区,根据所述植物区确定检测点位,通过无人机采集检测点位的相对高度;根据所述相对高度建立植物区模型,在所述植物区模型中确定检测路径,向无人机发送;接收无人机在检测路径下获取到的植物图像,对所述植物图像进行识别,得到长势报告。本发明通过无人机获取高度数据,创建植物区模型,基于所述植物区模型确定检测路径,使得无人机在检测路径下不断地获取植物图像,再借助现有的神经网络模型对所述植物图像进行识别,输出长势报告,在保证识别准度的前提下,极大地提高了识别效率。
技术研发人员:张建亮,陈鹏,许宝坤,于换喜,许佳宁
受保护的技术使用者:生态环境部南京环境科学研究所
技术研发日:
技术公布日:2024/1/16
- 还没有人留言评论。精彩留言会获得点赞!