一种稀疏点云重建方法与流程
本发明涉及无人机三维重建领域,具体涉及一种稀疏点云重建方法。
背景技术:
1、稀疏点云重建技术主要包含多视角影像获取、多视角影像的特征点提取,基于特征点的三角测量和捆绑调整获取稀疏点云三维坐标的步骤,最终将真实目标场景转换为计算机能够显示的数学模型。三维模型的完整性和精确度严重依赖于特征匹配的精度,如果特征匹配精度低,则会破坏三维模型与真实场景的几何一致性,即通过现有技术构建的三维模型与待重建场景的真实信息可能存在偏差,难以保证三维模型的质量,甚至导致三维重建过程失败。
2、在稀疏点云重建过程中,如果多视角影像的特征点数量过多,即使重建的完整度较好,但是过多数量特征点的提取会花费大量的时间,而且过量提取的特征点一般质量较差,而质量较差的特征点对会影响三维重建的效果。如果多视角影像的特征点数量过少,可以减少计算量,但无法充分发挥多视角卫星影像的信息优势,无法确保重建的完整性和精细程度,影响三维重建的效果。
技术实现思路
1、本发明提供一种稀疏点云重建方法,通过多维特征的提取和匹配,充分提取多视角影像的特征点、特征线和特征面,增加多视角影像的多维信息,解决了现有稀疏重建技术中多视角图像中存在的匹配点数量不足导致的重建结果不准确的问题。同时,本发明通过整体筛选和维度融合策略,基于价值取点策略对特征线和特征面中进行去冗降维,精准筛选出重建信息的点作为特征点的补充,以提高对特征面和特征线的去冗效率,从而进一步提高稀疏点云的重建效率。
2、为实现上述目的,本发明提供如下技术方案:
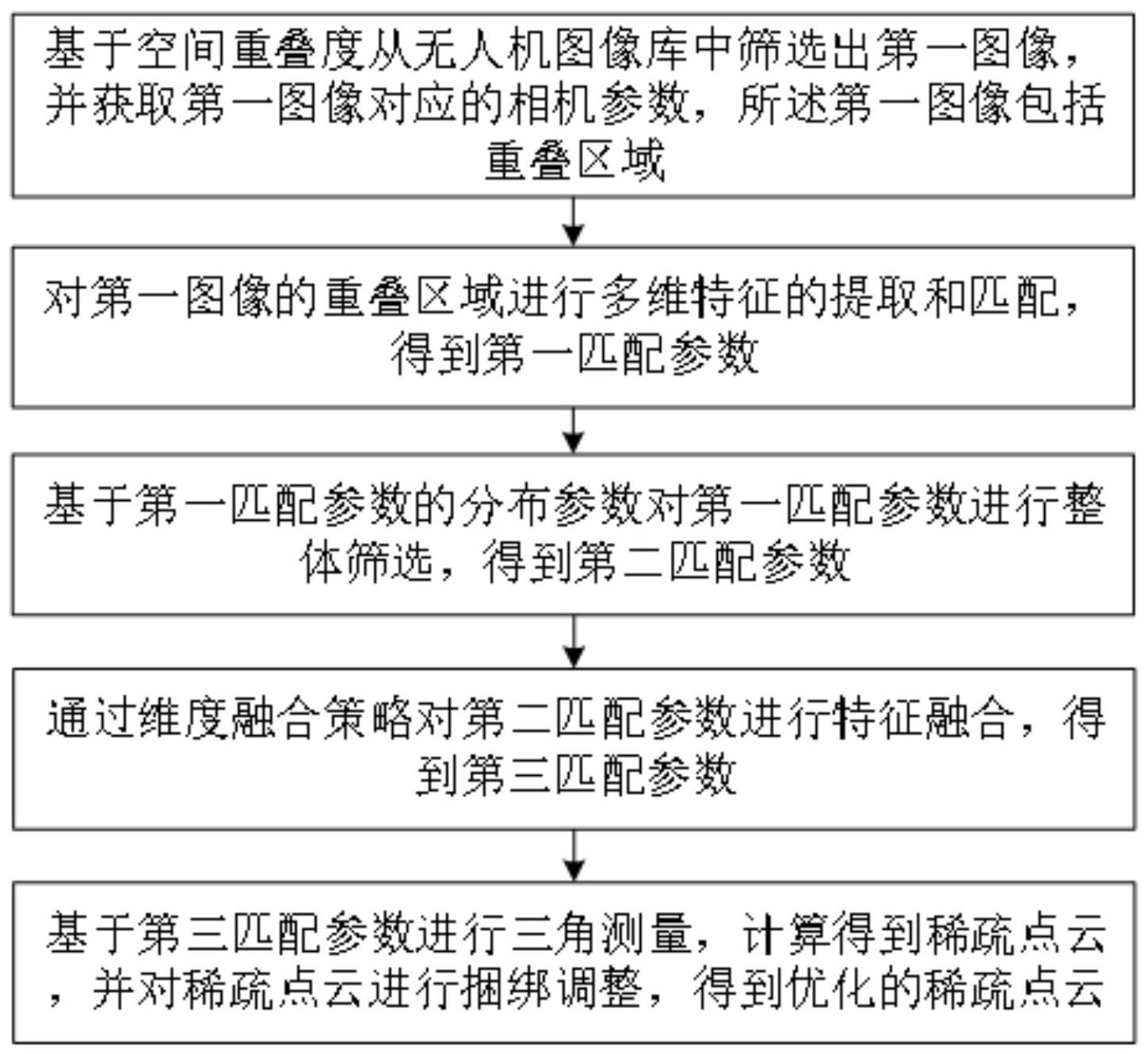
3、基于空间重叠度从无人机图像库中筛选出第一图像,并获取第一图像对应的相机参数,所述第一图像包括重叠区域;
4、对第一图像的重叠区域进行多维特征的提取和匹配,得到第一匹配参数;
5、基于第一匹配参数的分布参数对第一匹配参数进行整体筛选,得到第二匹配参数;
6、通过维度融合策略对第二匹配参数进行特征融合,得到第三匹配参数;
7、基于第三匹配参数进行三角测量,计算得到稀疏点云,并对稀疏点云进行捆绑调整,得到优化的稀疏点云。
8、进一步地,所述维度融合策略包括:
9、通过取点策略对第二匹配线和第二匹配面进行去冗降维,得到降维点;
10、将第二匹配点和降维点的并集作为第三匹配点,并将第三匹配点作为第三匹配参数。
11、进一步地,所述取点策略包括均匀取点策略、随机取点策略和价值取点策略,所述价值取点策略包括:
12、基于第二匹配参数的相关度对第二图像进行背景分离,得到前景、第一背景和第二背景;
13、通过网格切分法将背景分离的第二图像进行切分,得到子网格;
14、通过特征提取网络分别对子网格的前景、子网格的第一背景、子网格的第二背景提取特征,得到子网格的前景特征、子网格的第一背景特征、子网格的第二背景特征;
15、将子网格的第一背景特征与子网格的第二背景特征按照预设权重以add方式进行特征融合,得到子网格的高维背景特征;
16、将子网格的高维背景特征和子网格的前景特征以concat方式进行特征融合输入离群值输出网络,得到子网格的离群值;
17、基于子网格的离群值对子网络进行离群等级划分,得到不同离群等级的子网格;
18、基于连通域算法将相邻的且属于同一离群等级的子网格连通,得到连通域,并将连通域内的子网格的离群等级赋予该连通域,得到连通域的离群等级;
19、基于不同等级的连通域设定等级距离,所述等级距离与不同等级连通域一一对应,并形成连通域-距离表;
20、通过查找连通域-距离表,根据第二匹配面和第二匹配线所属连通域等级,确定其等级距离,基于等级距离对第二匹配面和第二匹配线进行取点,得到降维点。
21、进一步地,所述连通域算法包括四邻域连通域算法和八邻域连通域算法。
22、进一步地,所述第二匹配参数包括第二匹配点、第二匹配线、第二匹配面,所述第三匹配参数包括第三匹配点,所述基于第一匹配参数的分布参数对第一匹配参数进行整体筛选,包括:
23、基于分布参数对第一图像进行优选,得到第二图像;
24、将第二图像中的第一匹配参数作为第二匹配参数,所述第二匹配参数包括第二匹配点、第二匹配线、第二匹配面。
25、进一步地,所述基于第一匹配参数的分布参数对第一图像进行优选,包括:
26、获取分布参数,所述分布参数包括三维方差、三维数量、三维密度、三维信息熵;
27、通过分布参数计算优选值,将优选值大于优选阈值的第一图像作为第二图像。
28、进一步地,所述三维数量为第一匹配点、第一匹配线和第一匹配面的数量的总和,所述三维密度为三维数量与第一图像的面积的比值,所述三维信息熵和所述三维方差通过网格从属策略计算得到。
29、进一步地,所述网格从属策略包括:
30、将第一图像进行网格划分;
31、对第一匹配参数进行参数统计,得到每个网格中属于该网格的第一匹配参数的数量;
32、将每个网格中属于该网格的第一匹配参数的数量,作为样本,将第一图像中所有样本的集合作为样本集;
33、分别计算样本集的方差和信息熵作为三维方差和三维信息熵。
34、进一步地,所述对第一匹配参数进行参数统计,包括:
35、当第一匹配参数分布在网格内或与网格相交,认为该第一匹配参数属于该网格;
36、统计每个网格中属于该网格的第一匹配参数的数量。
37、进一步地,所述第一匹配参数包括第一匹配点、第一匹配线、第一匹配面。
38、本发明产生的有益效果是:
39、本发明通过多维特征的提取和匹配增加了不同维度的特征匹配对,充分利用了高维度特征,并通过整体筛选和维度融合策略选择性地将高维特征转换为高价值的低维特征,极大提高三角测量和捆绑调整的效率,去除高维特征中的冗余信息,得到高质量的低维特征,充分利用各个维度特征信息解决了因匹配点较少而导致重建失败的问题。
技术特征:
1.一种稀疏点云重建方法,其特征在于,该方法包括:
2.根据权利要求1所述的方法,其特征在于,所述第二匹配参数包括第二匹配点、第二匹配线、第二匹配面,所述第三匹配参数包括第三匹配点,所述维度融合策略包括:
3.根据权利要求2所述的方法,其特征在于,所述价值取点策略包括:
4.根据权利要求3所述的方法,其特征在于,所述连通域算法包括四邻域连通域算法和八邻域连通域算法。
5.根据权利要求1所述的方法,其特征在于,所述基于第一匹配参数的分布参数对第一匹配参数进行整体筛选,包括:
6.根据权利要求5所述的方法,其特征在于,所述基于第一匹配参数的分布参数对第一图像进行优选,包括:
7.根据权利要求6所述的方法,其特征在于,所述三维数量为第一匹配点、第一匹配线和第一匹配面的数量的总和,所述三维密度为三维数量与第一图像的面积的比值,所述三维信息熵和所述三维方差通过网格从属策略计算得到。
8.根据权利要求7所述的方法,其特征在于,所述网格从属策略包括:
9.根据权利要求8所述的方法,其特征在于,所述对第一匹配参数进行参数统计,包括:
10.根据权利要求1所述的方法,其特征在于,所述第一匹配参数包括第一匹配点、第一匹配线、第一匹配面。
技术总结
本发明属于无人机三维重建领域,公开了一种稀疏点云重建方法,该方法包括:基于空间重叠度筛选得到第一图像,通过多维特征的提取和匹配得到第一匹配参数以丰富重建特征的维度信息,基于第一匹配参数的分布参数对第一匹配参数进行整体筛选,得到第二匹配参数,然后将第二匹配参数中的第二匹配线和第二匹配面进行去冗降维,得到第三匹配参数;基于第三匹配参数进行三角测量和捆绑调整,得到三维点云坐标并优化。本发明通过引入多维特征增加了匹配对的维度信息,缓解了因匹配点较少而导致重建失败的问题。
技术研发人员:杜慧丽,董铱斐,邹圣兵
受保护的技术使用者:北京数慧时空信息技术有限公司
技术研发日:
技术公布日:2024/1/16
- 还没有人留言评论。精彩留言会获得点赞!