一种从点云地图中剔除障碍物点云的方法和装置与流程
本发明涉及自动驾驶,尤其涉及一种从点云地图中剔除障碍物点云的方法和装置。
背景技术:
1、在自动驾驶场景中,为了避免障碍物的干扰,需要从点云地图中剔除路上的行人、车辆等障碍物点云。
2、现有技术一般将点云地图导入到软件中,由人工通过软件手动剔除。
3、但是,该方法需要耗费较长的时间。
技术实现思路
1、有鉴于此,本发明实施例提供一种从点云地图中剔除障碍物点云的方法和装置,能够提高剔除障碍物点云的效率。
2、第一方面,本发明实施例提供了一种从点云地图中剔除障碍物点云的方法,包括:
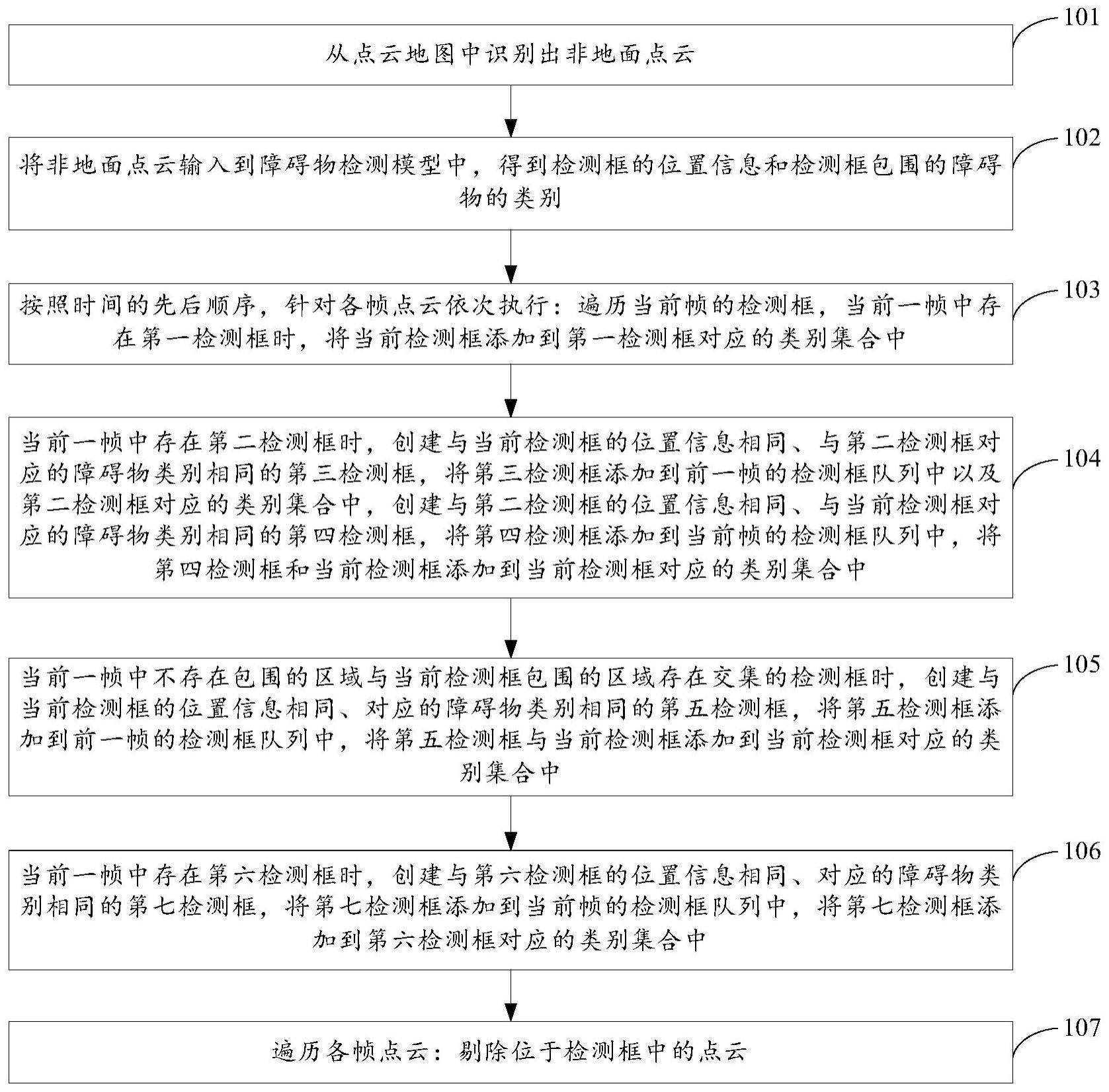
3、从点云地图中识别出非地面点云;
4、将所述非地面点云输入到障碍物检测模型中,得到检测框的位置信息和所述检测框包围的障碍物的类别;
5、按照时间的先后顺序,针对各帧点云依次执行:遍历当前帧的检测框,当前一帧中存在第一检测框时,将当前检测框添加到所述第一检测框对应的类别集合中;当前一帧中存在第二检测框时,创建与所述当前检测框的位置信息相同、与所述第二检测框对应的障碍物类别相同的第三检测框,将所述第三检测框添加到前一帧的检测框队列中以及所述第二检测框对应的类别集合中,创建与所述第二检测框的位置信息相同、与所述当前检测框对应的障碍物类别相同的第四检测框,将所述第四检测框添加到当前帧的检测框队列中,将所述第四检测框和所述当前检测框添加到所述当前检测框对应的类别集合中;当前一帧中不存在包围的区域与所述当前检测框包围的区域存在交集的检测框时,创建与所述当前检测框的位置信息相同、对应的障碍物类别相同的第五检测框,将所述第五检测框添加到前一帧的检测框队列中,将所述第五检测框与所述当前检测框添加到所述当前检测框对应的类别集合中;当前一帧中存在第六检测框时,创建与所述第六检测框的位置信息相同、对应的障碍物类别相同的第七检测框,将所述第七检测框添加到当前帧的检测框队列中,将所述第七检测框添加到所述第六检测框对应的类别集合中;
6、遍历各帧点云:剔除位于检测框中的点云;
7、其中,所述第一检测框与所述当前检测框对应的障碍物类别相同、且所述第一检测框包围的区域与所述当前检测框包围的区域存在交集;所述第二检测框与所述当前检测框对应的障碍物类别不同、且所述第二检测框包围的区域与所述当前检测框包围的区域存在交集;所述第六检测框包围的区域与当前帧的各个检测框包围的区域均不存在交集。
8、第二方面,本发明实施例提供了一种从点云地图中剔除障碍物点云的装置,包括:
9、点云识别模块,配置为从点云地图中识别出非地面点云;
10、障碍物检测模块,配置为将所述非地面点云输入到障碍物检测模型中,得到检测框的位置信息和所述检测框包围的障碍物的类别;
11、处理模块,配置为按照时间的先后顺序,针对各帧点云依次执行:遍历当前帧的检测框,当前一帧中存在第一检测框时,将当前检测框添加到所述第一检测框对应的类别集合中;当前一帧中存在第二检测框时,创建与所述当前检测框的位置信息相同、与所述第二检测框对应的障碍物类别相同的第三检测框,将所述第三检测框添加到前一帧的检测框队列中以及所述第二检测框对应的类别集合中,创建与所述第二检测框的位置信息相同、与所述当前检测框对应的障碍物类别相同的第四检测框,将所述第四检测框添加到当前帧的检测框队列中,将所述第四检测框和所述当前检测框添加到所述当前检测框对应的类别集合中;当前一帧中不存在包围的区域与所述当前检测框包围的区域存在交集的检测框时,创建与所述当前检测框的位置信息相同、对应的障碍物类别相同的第五检测框,将所述第五检测框添加到前一帧的检测框队列中,将所述第五检测框与所述当前检测框添加到所述当前检测框对应的类别集合中;当前一帧中存在第六检测框时,创建与所述第六检测框的位置信息相同、对应的障碍物类别相同的第七检测框,将所述第七检测框添加到当前帧的检测框队列中,将所述第七检测框添加到所述第六检测框对应的类别集合中;
12、剔除模块,配置为遍历各帧点云:剔除位于检测框中的点云;
13、其中,所述第一检测框与所述当前检测框对应的障碍物类别相同、且所述第一检测框包围的区域与所述当前检测框包围的区域存在交集;所述第二检测框与所述当前检测框对应的障碍物类别不同、且所述第二检测框包围的区域与所述当前检测框包围的区域存在交集;所述第六检测框包围的区域与当前帧的各个检测框包围的区域均不存在交集。
14、第三方面,本发明实施例提供了一种电子设备,包括:
15、一个或多个处理器;
16、存储装置,用于存储一个或多个程序,
17、当所述一个或多个程序被所述一个或多个处理器执行,使得所述一个或多个处理器实现如上述任一实施例所述的方法。
18、第四方面,本发明实施例提供了一种计算机可读介质,其上存储有计算机程序,所述程序被处理器执行时实现如上述任一实施例所述的方法。
19、上述发明中的一个实施例具有如下优点或有益效果:基于障碍物检测模型识别得到障碍物的检测框,按照时间的先后顺序,对各个检测框进行跟踪,通过相邻帧中检测框的位置和障碍物的类别,确定各帧点云中的障碍物点云,与现有技术相比,该方法更加便捷,提高障碍物点云的剔除效率。
20、上述的非惯用的可选方式所具有的进一步效果将在下文中结合具体实施方式加以说明。
技术特征:
1.一种从点云地图中剔除障碍物点云的方法,其特征在于,包括:
2.如权利要求1所述的方法,其特征在于,进一步包括:
3.如权利要求1所述的方法,其特征在于,进一步包括:
4.如权利要求1-3中任一所述的方法,其特征在于,进一步包括:
5.如权利要求1所述的方法,其特征在于,
6.如权利要求1所述的方法,其特征在于,
7.如权利要求1所述的方法,其特征在于,
8.一种从点云地图中剔除障碍物点云的装置,其特征在于,包括:
9.一种电子设备,其特征在于,包括:
10.一种计算机可读介质,其上存储有计算机程序,其特征在于,所述程序被处理器执行时实现如权利要求1-7中任一所述的方法。
技术总结
本发明公开了一种从点云地图中剔除障碍物点云的方法和装置,涉及自动驾驶技术领域。该方法包括:从点云地图中识别出非地面点云;将非地面点云输入到障碍物检测模型中,得到检测框的位置信息和检测框包围的障碍物的类别;按照时间的先后顺序,依次处理各帧点云,基于位置信息和障碍物的类别对各个检测框进行跟踪,得到各帧中包围障碍物的检测框,剔除位于检测框中的点云。该实施方式能够提高剔除障碍物点云的效率。
技术研发人员:张鹏
受保护的技术使用者:九识(苏州)智能科技有限公司
技术研发日:
技术公布日:2024/1/16
- 还没有人留言评论。精彩留言会获得点赞!