基于BIM与UAV的施工现场安全管理方法及系统与流程
本发明涉及建筑施工安全管理,更具体地说,它涉及基于bim与uav的施工现场安全管理方法及系统。
背景技术:
1、传统的施工安全风险管理在很大程度上依赖于对图纸的审查,以得出潜在的安全隐患,但安全危险可能会因各种情况(如图纸变更、天气条件等)而发生变化,这可能会导致安全风险管理发生变化,而通过传统的安全管理方法需要对发生变更的图纸重新进行审查,导致耗时耗力;同时根据二维图纸很难识别潜在的高坠、物体打击等隐患。
技术实现思路
1、本发明的目的在于提供基于bim与uav的施工现场安全管理方法及系统,将bim与uav两项技术进行融合,通过使用bim与uav识别施工前期所有类型的危险,并监测施工阶段的安全性能,从而最大限度地减少事故的发生,最终提高施工阶段的安全性。
2、本发明的上述技术目的是通过以下技术方案得以实现的:
3、第一方面,本申请实施例提供了基于bim与uav的施工现场安全管理方法,
4、施工前,管理方法包括:
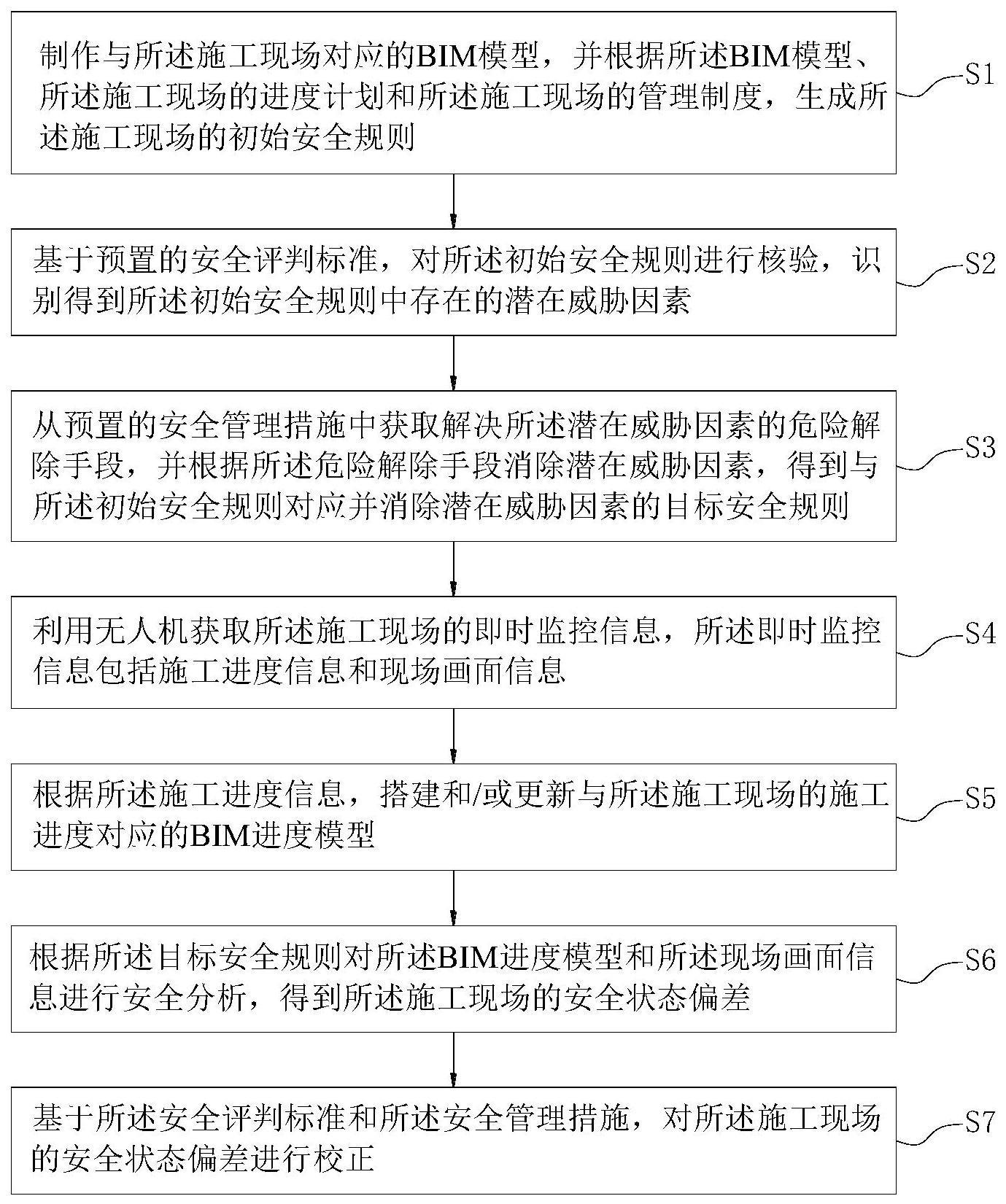
5、搭建与施工现场对应的bim模型,并根据bim模型、施工现场的进度计划和施工现场的管理制度以及施工现场中施工安全管理人员的相关管理经验,生成施工现场的初始安全规则;
6、基于预置的安全评判标准,对初始安全规则进行核验,识别得到初始安全规则中施工各阶段施工现场存在的潜在威胁因素;
7、从预置的安全管理措施中获取解决潜在威胁因素的危险解除手段,并根据危险解除手段消除潜在威胁因素,得到与初始安全规则对应并消除潜在威胁因素的目标安全规则;
8、施工时,管理方法包括:
9、利用无人机获取施工现场的即时监控信息,即时监控信息包括施工进度信息和现场画面信息;
10、根据施工进度信息,搭建和/或更新与施工现场的施工进度对应的bim进度模型;
11、根据目标安全规则对bim进度模型和现场画面信息进行安全分析,得到施工现场的安全状态偏差;
12、基于安全评判标准和安全管理措施,对施工现场的安全状态偏差进行校正。
13、本发明的有益效果是:通过将bim技术和无人机技术进行融合、管理,达到识别施工前期所有类型的危险,并监测施工阶段的安全性能,在施工阶段发生存在安全风险时,可以提前获取相应的安全状态,并实现对安全状态偏差的校正,从而最大限度地减少事故的发生,最终提高施工阶段的安全性。
14、在上述技术方案的基础上,本发明还可以做如下改进。
15、进一步,上述bim模型为场部模型或结构模型。
16、进一步,上述利用无人机获取施工现场的即时监控信息,包括:
17、根据bim模型,分析得到即时监控信息的目标获取位置;
18、根据目标获取位置的数量,配置至少与目标获取位置对应数量的无人机,并将各个无人机置于对应的目标获取位置。
19、采用上述进一步方案的有益效果是:通过bim模型来分析获得最佳的获取位置,可以使无人机的拍摄角度具有角度好、视野广等的优点。
20、进一步,上述方法还包括:
21、根据bim进度模型,获取和/或更新目标获取位置,得到与每个目标获取位置对应的目标校正位置;
22、将与各个目标获取位置对应的无人机重新置于目标获取位置对应的目标校正位置。
23、采用上述进一步方案的有益效果是:通过bim进度模型不断的调整每个目标获取位置,从而得到与目标获取位置对应的目标校正位置,可以使获即时监控信息更加直观、更加全面和更准确。
24、第二方面,本申请实施例提供了基于bim与uav的施工现场安全管理系统,应用于第一方面中任一项的基于bim与uav的施工现场安全管理方法,管理系统包括施工准备单元和施工进行单元,施工准备单元包括:
25、初始规则生成模块,用于搭建与施工现场对应的bim模型,并根据bim模型、施工现场的进度计划和施工现场的管理制度以及施工现场中施工安全管理人员的相关管理经验,生成施工现场的初始安全规则;
26、潜在威胁识别模块,用于基于预置的安全评判标准,对初始安全规则进行核验,识别得到初始安全规则中施工各阶段施工现场存在的潜在威胁因素;
27、目标规则生成模块,用于从预置的安全管理措施中获取解决潜在威胁因素的危险解除手段,并根据危险解除手段消除潜在威胁因素,得到与初始安全规则对应并消除潜在威胁因素的目标安全规则;
28、施工进行单元包括:
29、即时信息获取模块,用于利用无人机获取施工现场的即时监控信息,即时监控信息包括施工进度信息和现场画面信息;
30、进度模型生成模块,用于根据施工进度信息,搭建和/或更新与施工现场的施工进度对应的bim进度模型;
31、安全状态分析模块,用于根据目标安全规则对bim进度模型和现场画面信息进行安全分析,得到施工现场的安全状态偏差;
32、状态偏差校正模块,用于基于安全评判标准和安全管理措施,对施工现场的安全状态偏差进行校正。
33、进一步,上述初始规则生成模块中,bim模型为场部模型或结构模型。
34、进一步,上述即时信息获取模块包括:
35、目标位置获取子模块,用于根据bim模型,分析得到即时监控信息的目标获取位置;
36、配置子模块,用于根据目标获取位置的数量,配置至少与目标获取位置对应数量的无人机,并将各个无人机置于对应的目标获取位置。
37、进一步,上述即时信息获取模块还包括:
38、位置更新子模块,用于根据bim进度模型,获取和/或更新目标获取位置,得到与每个目标获取位置对应的目标校正位置;
39、位置调整子模块,用于将与各个目标获取位置对应的无人机重新置于目标获取位置对应的目标校正位置。
40、第三方面,本申请实施例提供了一种电子设备,包括存储器、处理器及存储在存储器上并可在处理器上运行的计算机程序,处理器执行计算机程序时实现第一方面中任一项的方法。
41、第四方面,本申请实施例提供了一种非暂态计算机可读存储介质,非暂态计算机可读存储介质存储计算机指令,计算机指令使计算机执行第一方面中任一项的方法。
42、与现有技术相比,本发明至少具有以下的有益效果:
43、通过将bim技术和无人机技术进行融合、管理,达到识别施工前期所有类型的危险,并监测施工阶段的安全性能,在施工阶段发生存在安全风险时,可以提前获取相应的安全状态,并实现对安全状态偏差的校正,从而最大限度地减少事故的发生,最终提高施工阶段的安全性。
44、通过bim模型来分析获得最佳的获取位置,可以使无人机的拍摄角度具有角度好、视野广等的优点,并同时通过bim进度模型不断的调整每个目标获取位置,得到与目标获取位置对应的目标校正位置,可以使即时监控信息更加直观、更加全面和更准确。
技术特征:
1.基于bim与uav的施工现场安全管理方法,其特征在于,
2.根据权利要求1所述的基于bim与uav的施工现场安全管理方法,其特征在于,所述bim模型为场部模型或结构模型。
3.根据权利要求1所述的基于bim与uav的施工现场安全管理方法,其特征在于,所述利用无人机获取所述施工现场的即时监控信息,包括:
4.根据权利要求3所述的基于bim与uav的施工现场安全管理方法,其特征在于,所述方法还包括:
5.基于bim与uav的施工现场安全管理系统,应用于权利要求1-4中任一项所述的基于bim与uav的施工现场安全管理方法,其特征在于,所述管理系统包括施工准备单元和施工进行单元,所述施工准备单元包括:
6.根据权利要求5所述的基于bim与uav的施工现场安全管理系统,其特征在于,所述初始规则生成模块中,所述bim模型为场部模型或结构模型。
7.根据权利要求5所述的基于bim与uav的施工现场安全管理系统,其特征在于,所述即时信息获取模块包括:
8.根据权利要求7所述的基于bim与uav的施工现场安全管理系统,其特征在于,所述即时信息获取模块还包括:
9.一种电子设备,其特征在于,包括存储器、处理器及存储在存储器上并可在处理器上运行的计算机程序,处理器执行计算机程序时实现权利要求1-4中任一项所述的方法。
10.一种非暂态计算机可读存储介质,其特征在于,所述非暂态计算机可读存储介质存储计算机指令,计算机指令使计算机执行权利要求1-4中任一项所述的方法。
技术总结
本发明公开了基于BIM与UAV的施工现场安全管理方法及系统,涉及建筑施工安全管理技术领域,该方法包括:施工现场在进行施工前,搭建与施工现场对应的BIM模型,从预置的安全管理措施中获取解决潜在威胁因素的危险解除手段,得到与初始安全规则对应并消除潜在威胁因素的目标安全规则;施工现场在进行施工时,利用无人机获取施工现场的即时监控信息,根据目标安全规则对BIM进度模型和现场画面信息进行安全分析,得到所述施工现场的安全状态偏差;对施工现场的安全状态偏差进行校正,通过使用BIM与UAV识别施工前期所有类型的危险,并监测施工阶段的安全性能,从而最大限度地减少事故的发生,最终提高施工阶段的安全性。
技术研发人员:董美美,路进学,惠争卜,李松,徐高友,吴春澍,夏成良,赵志伟,蒋生文,毛焰珠,陈忠
受保护的技术使用者:中国核工业二四建设有限公司
技术研发日:
技术公布日:2024/1/16
- 还没有人留言评论。精彩留言会获得点赞!