用于激光扫描仪的点云滤波方法及系统与流程
本发明涉及一种用于激光扫描仪的点云滤波方法及系统。
背景技术:
1、适用于室内环境扫描的3d激光扫描仪多采用tof(time-of-flight)测距技术,其中最常用的是lidar(light detection and ranging)。它是一种通过测量发送和收到的脉冲信号的时间差来计算物体距离的光学遥感技术。它的优势在于精度高、距离远;但它也受限于一切光的物理特质,如,lidar很难测量传感器到窗户的距离(光穿过玻璃会折射),lidar无法扫描墙体后面的结构(光沿直线传播)等。另外,lidar的精度也受被摄物体的材质、与扫描仪之间的距离和入射角度影响。
2、适用于室内环境扫描的3d激光扫描仪主要分为手持式和固定式。手持式设备轻巧便携并且内置自定位功能,操作人员可在扫描的同时移动它,因此该技术路线并不被遮挡问题困扰。固定式扫描仪由三脚架支持,通过旋转底座,采集以该点为球心的光束可以到达的360°视野的数据。基于场景重建的准确性与时效性的考量,固定式的静态架站式通常是更好的选择。
3、静态架站式扫描仪通常由一个在垂直方向转动的2d激光雷达和一个在水平方向转动的转台组成,通过数字电路的精确控制,基于给定的仰角分辨率和方位角分辨率,在每个(方位角azimuth,仰角zenith)的组合进行对采样,得到距离值distance,最后进行球面坐标系到笛卡尔坐标系的转换,得到所测的点的位置(x,y,z)。
4、激光扫描仪的精度则体现在激光雷达对距离值的测量误差上。也由于误差的存在,通常要对点云进行去噪和滤波处理。如常用的双边滤波法,对于每个点,滤波器会考虑其相邻点的空间距离和灰度差异,并对点的坐标进行加权平均。空间上离得更近且灰度差异小的像素将得到更高的权重,从而更好地保持边缘信息。通过这种方式,双边滤波法能够在去除噪声的同时,保留图像的细节和边缘特征。当前市面上常见的点云滤波算法都在笛卡尔坐标系下进行运算,以欧式距离为评判标准来找每一个点的邻居,并对(x,y,z)进行修改。
5、在点云处理中,算法通常通过构建八叉树、kd tree,并设定一个距离值d。对于每一个点,所有到达该点的距离小于d的点都会被视为邻居。实际应用中,如果不对点云做降采样处理,这样的邻居查找的过程耗时非常长。从而导致运行时间长,且处理效果差。
技术实现思路
1、本发明要解决的技术问题是为了克服现有技术中点云滤波过程中运算量大,运算时间长,滤波效果差的缺陷,提供一种可以缩短点云处理的运算时间,在较短运行时间内得到更准确的点云数据,提升点云测量准确度的用于激光扫描仪的点云滤波方法及系统。
2、本发明是通过下述技术方案来解决上述技术问题:
3、一种用于激光扫描仪的点云滤波方法,其特点在于,所述点云滤波方法包括:
4、获取待处理点云数据;
5、根据点云数据中全部数据点的球坐标生成一二维图像,所述二维图像每一像素的横坐标对应一个数据点的方位角且纵坐标对应一个数据点的仰角,像素的像素值对应数据点的深度值;
6、对每一个数据点,根据深度值获取数据点的滤波核的尺寸;
7、对于一个目标数据点,根据滤波核的尺寸在二维图像上查找目标数据点的邻居数据点;
8、利用邻居数据点获取目标数据点的深度值,并利用滤波后数据更新所述目标数据点的坐标。
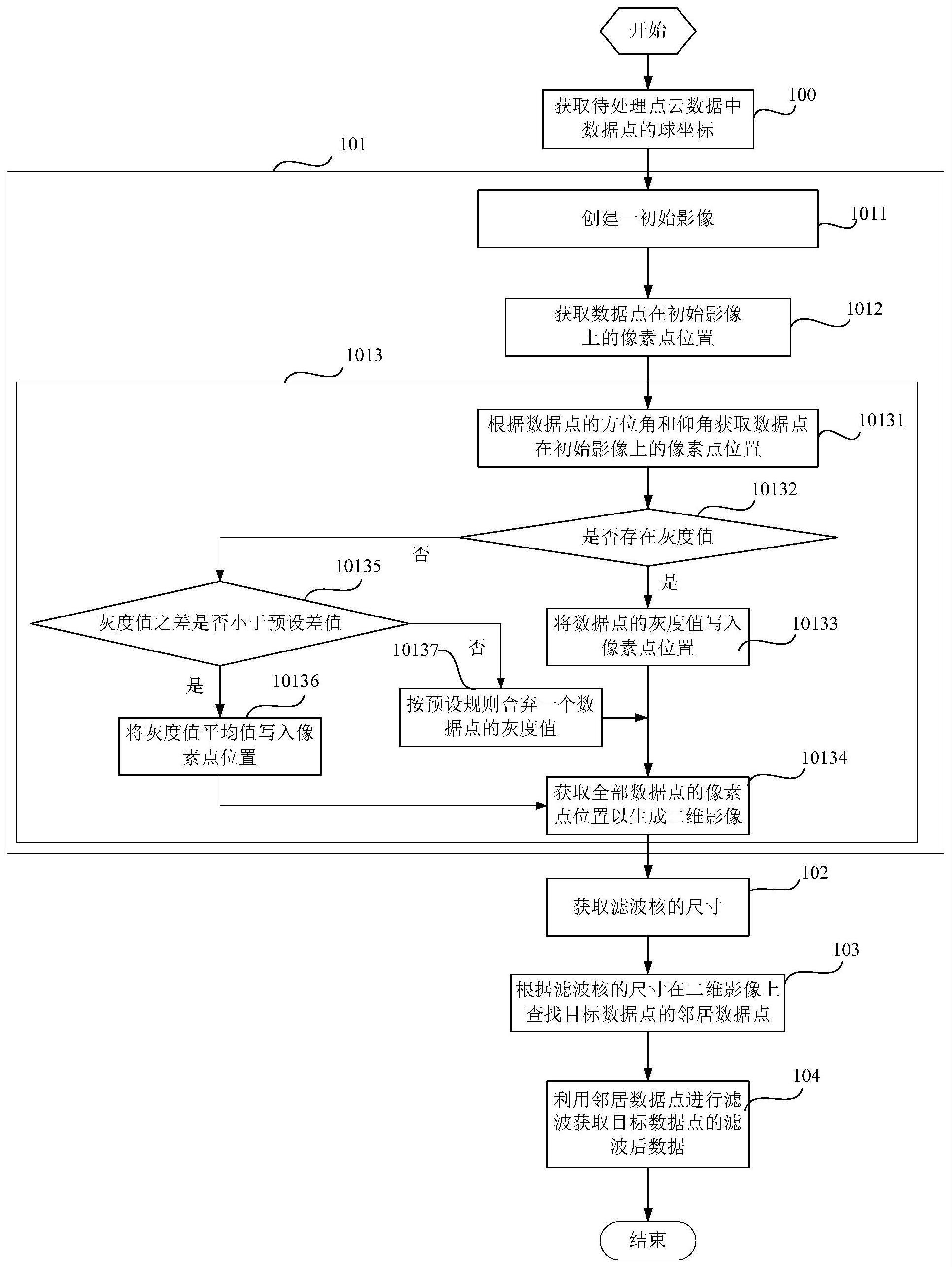
9、较佳地,所述根据点云数据中全部数据点的球坐标生成一二维图像,包括:
10、创建一初始图像,所述初始图像的尺寸根据激光扫描仪的仰角分辨率和方位角分辨率确定;
11、对于每一数据点,根据数据点的方位角和仰角获取数据点在初始图像上的像素点位置,用数据点的深度值更新所述像素点位置的像素值;
12、获取全部数据点的深度值以及像素点位置以生成所述二维图像。
13、较佳地,所述获取全部数据点的深度值以及像素点位置以生成所述二维图像,包括:
14、对于每一数据点,根据数据点的方位角和仰角获取数据点在初始图像上的像素点位置,并判断像素点位置是否存在灰度值,
15、若否则将数据点的灰度值写入像素点位置;
16、若是则判断当前数据点的深度值和已存在于所述像素点位置的灰度值之差是否小于预设差值,若是则将当前数据点和已存在于所述像素点位置的灰度值的平均值写入像素点位置,若否则像素点位置的灰度值不做更新。
17、较佳地,所述点云滤波方法包括:
18、对于每一数据点,根据激光束与扫描物体的表面的法线夹角、粗糙度以及所述数据点的反射率获取数据点的质量参数,所述法线夹角越小激光扫描质量越高,所述粗糙度越高激光扫描质量越高,激光反射率越高激光扫描质量越高;
19、将质量参数与数据点球坐标中的距离值关联,其中,在有效区间之内,扫描站点与扫描物体之间距离越近,质量参数越高;
20、判断数据点的质量参数评分是否小于参数阈值,若是则舍弃数据点。
21、较佳地,所述根据深度值获取数据点的滤波核的尺寸,包括:
22、对于一数据点,根据数据点的距离值以及距离值关联的质量参数获取数据点的滤波核的尺寸,数据点的距离值越小对应滤波核的尺寸越大。
23、较佳地,所述点云滤波方法包括:
24、对于一个数据点,利用数据点及周围数据点生成拟合平面;
25、获取拟合平面的法线并计算该数据点的法线夹角;
26、所述根据深度值获取数据点的滤波核的尺寸,包括:
27、对于一数据点,根据获取数据点的光斑尺寸以及激光扫描仪的参数获取数据点的滤波核的尺寸。
28、较佳地,所述利用邻居数据点进行滤波获取目标数据点的滤波后数据,包括:
29、对于一个数据点,利用数据点的邻居数据点做双边滤波处理,双边滤波中的权重值根据数据点的质量参数、邻居数据点与该数据点的深度值之差、邻居数据点与该数据点的角距离获取,质量参数越高权重越大小,深度值之差越小权重越大、角距离越小权重越大。
30、本发明还提供一种点云滤波系统,所述点云滤波系统包括一处理模块以及一激光扫描仪,所述点云滤波系统用于实现如上所述的点云滤波方法。
31、本发明还提供一种激光扫描仪,所述激光扫描仪包括一处理模块,所述激光扫描仪用于实现如上所述的点云滤波方法。
32、符合本领域常识的基础上,上述各优选条件,可任意组合,即得本发明各较佳实例。
33、本发明的积极进步效果在于:
34、本发明可以缩短点云处理的运算时间,在较短运行时间内得到更准确的点云数据,提升点云测量的准确度。
技术特征:
1.一种用于激光扫描仪的点云滤波方法,其特征在于,所述点云滤波方法包括:
2.如权利要求1所述的点云滤波方法,其特征在于,所述根据点云数据中全部数据点的球坐标生成一二维图像,包括:
3.如权利要求2所述的点云滤波方法,其特征在于,所述获取全部数据点的深度值以及像素点位置以生成所述二维图像,包括:
4.如权利要求1所述的点云滤波方法,其特征在于,所述点云滤波方法包括:
5.如权利要求4所述的点云滤波方法,其特征在于,所述根据深度值获取数据点的滤波核的尺寸,包括:
6.如权利要求5所述的点云滤波方法,其特征在于,所述点云滤波方法包括:
7.如权利要求4所述的点云滤波方法,其特征在于,所述利用邻居数据点进行滤波获取目标数据点的滤波后数据,包括:
8.一种点云滤波系统,其特征在于,所述点云滤波系统包括一处理模块以及一激光扫描仪,所述点云滤波系统用于实现如权利要求1至7中任意一项所述的点云滤波方法。
9.一种激光扫描仪,其特征在于,所述激光扫描仪包括一处理模块,所述激光扫描仪用于实现如权利要求1至7中任意一项所述的点云滤波方法。
技术总结
本发明公开了一种用于激光扫描仪的点云滤波方法及系统,所述点云滤波方法包括:获取待处理点云数据;根据点云数据中全部数据点的球坐标生成一二维图像,所述二维图像每一像素的横坐标对应一个数据点的方位角且纵坐标对应一个数据点的仰角,像素的像素值对应数据点的深度值;对每一个数据点,根据深度值获取数据点的滤波核的尺寸;对于一个目标数据点,根据滤波核的尺寸在二维图像上查找目标数据点的邻居数据点;利用邻居数据点获取目标数据点的深度值,并利用滤波后数据更新所述目标数据点的坐标。本发明极大的缩短了点云处理的运算时间,在较短运行时间内得到噪声更少、更薄、更准确的点云数据,提升了点云测量的准确度和平面分割的质量。
技术研发人员:许津玉子,朱子耕,陈鸿群
受保护的技术使用者:上海盎维信息技术有限公司
技术研发日:
技术公布日:2024/1/16
- 还没有人留言评论。精彩留言会获得点赞!