识别步态的方法、装置、设备和可读介质与流程
本公开的示例实施例总体涉及计算机视觉,并且更具体地,涉及识别步态的方法、装置、设备、计算机可读存储介质。
背景技术:
1、随着技术的进步与社会的发展,随着例如智慧城市、智能交通等技术的发展,人们的生活也日渐便利。伴随着这些技术的发展,为兼顾便利用户与信息安全,生物识别技术同样逐渐发展。例如,可以基于人脸、虹膜和指纹等生物特征进行用户识别。但这些技术通常局限于识别距离,并且需要受试者主动配合才能实现。此外,由于这些特征较为固定,较容易被窃取、伪造。
2、在此情况下,步态识别技术被提出,步态识别技术可以通过人们走路的姿态进行身份识别,具有非接触远距离和不易伪装的特点,可以在人们的行走过程中实现无感识别。由此,如何提高步态识别的精度、提升步态识别的准确性,是值得关注和迫切需求的。
技术实现思路
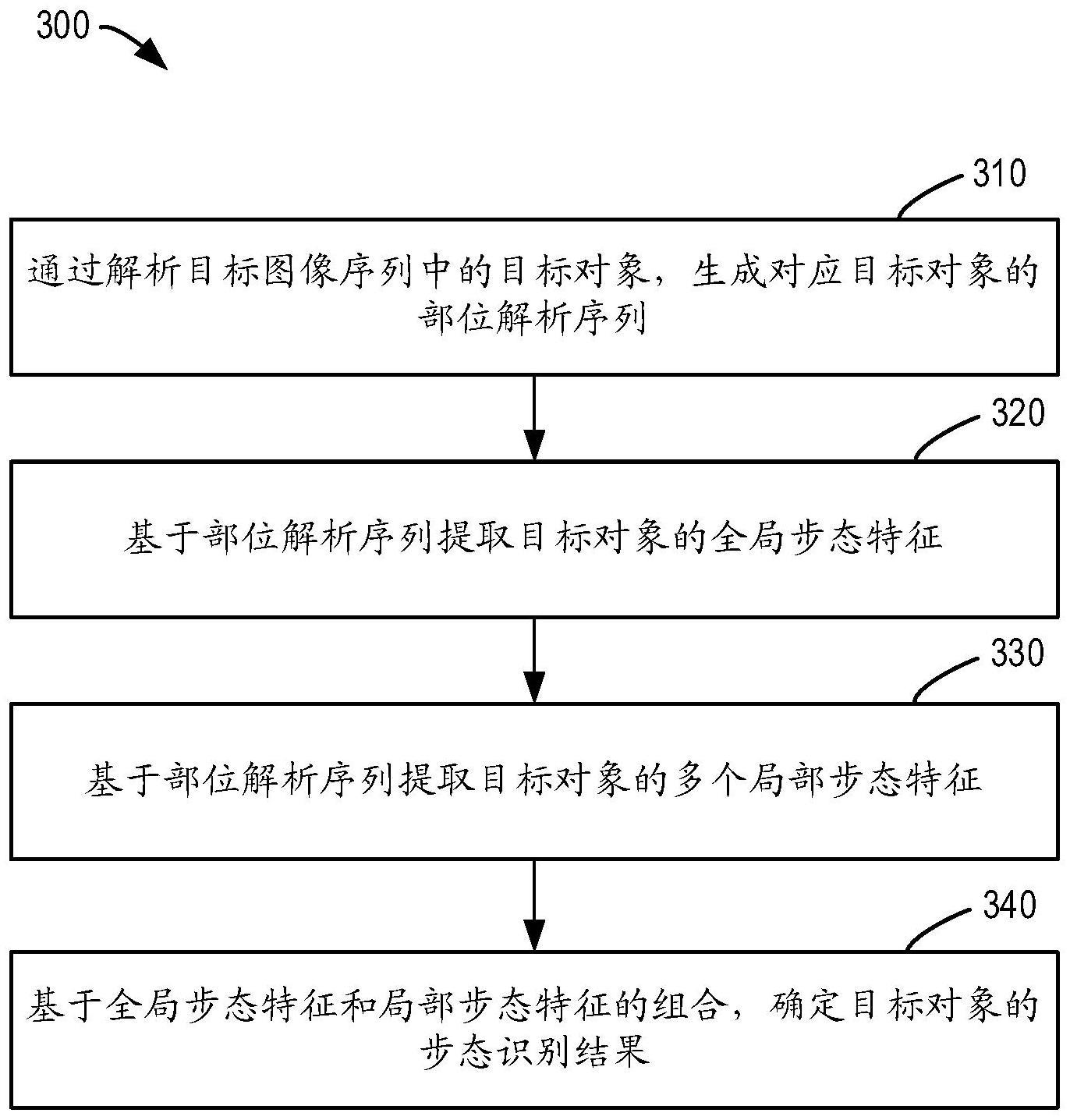
1、在本公开的第一方面,提供一种识别步态的方法。该方法包括:通过解析目标图像序列中的目标对象,生成对应目标对象的部位解析序列,其中部位解析序列用于指示组成目标对象的多个部位在目标图像序列中的相应位置;基于部位解析序列提取目标对象的全局步态特征;基于部位解析序列提取目标对象的多个局部步态特征,其中每个局部步态特征用于表征多个部位中的特定部位;以及基于全局步态特征和局部步态特征的组合,确定目标对象的步态识别结果。
2、在本公开的第二方面,提供一种用于识别步态的装置。该装置包括:解析模块,被配置为通过解析目标图像序列中的目标对象,生成对应目标对象的部位解析序列,其中部位解析序列用于指示组成目标对象的多个部位在目标图像序列中的相应位置;第一提取模块,被配置为基于部位解析序列提取目标对象的全局步态特征;第二提取模块,被配置为基于部位解析序列提取目标对象的多个局部步态特征,其中每个局部步态特征用于表征多个部位中的特定部位;以及确定模块,被配置为基于全局步态特征和局部步态特征的组合,确定目标对象的步态识别结果。
3、在本公开的第三方面,提供了一种电子设备。该电子设备包括至少一个处理单元;以及至少一个存储器,至少一个存储器被耦合到至少一个处理单元并且存储用于由至少一个处理单元执行的指令,指令在由至少一个处理单元执行时使电子设备执行本公开第一方面的方法。
4、在本公开的第四方面,提供了一种计算机可读存储介质。该计算机可读存储介质上存储有计算机程序,其可由处理器执行以执行根据本公开的第一方面的方法。
5、应当理解,
技术实现要素:
部分中所描述的内容并非旨在限定本公开的实施例的关键特征或重要特征,也不用于限制本公开的范围。本公开的其它特征将通过以下的描述而变得容易理解。
技术特征:
1.一种识别步态的方法,包括:
2.根据权利要求1所述的方法,还包括:
3.根据权利要求2所述的方法,其中所述全局步态特征利用步态识别模型中的全局子模型提取,并且其中从所述中间特征提取所述目标对象的全局步态特征包括:
4.根据权利要求2所述的方法,其中所述局部步态特征利用步态识别模型中的局部子模型提取,并且其中基于所述部位解析序列从所述中间特征提取所述目标对象的局部步态特征包括:
5.根据权利要求4所述的方法,其中确定与所述多个部位分别对应的多个部位级中间特征包括:
6.根据权利要求5所述的方法,其中所述多个控制因子在所述步态识别模型的训练过程中被确定。
7.根据权利要求4所述的方法,其中从所述多个部位级中间特征提取所述目标对象的多个局部步态特征包括:
8.根据权利要求4所述的方法,还包括:
9.根据权利要求1所述的方法,其中确定所述步态识别结果包括:
10.根据权利要求9所述的方法,其中基于所述组合步态特征来确定所述步态识别结果包括:
11.根据权利要求1所述的方法,其中所述全局步态特征的提取、所述多个局部步态特征的提取和所述步态识别结果的确定通过步态识别模型来实现,所述步态识别模型基于预设损失函数来训练得到,所述预设损失函数包括三元组损失函数和交叉熵损失函数中的至少一个。
12.根据权利要求11所述的方法,其中所述三元组损失函数基于以下来确定:
13.根据权利要求11所述的方法,其中所述交叉熵损失函数基于以下来确定:利用所述步态识别模型对训练样本集中的样本部位解析序列的预测步态识别结果与所标注的步态识别结果之间的差异。
14.根据权利要求1所述的方法,其中解析所述目标对象包括:
15.一种用于识别步态的装置,包括:
16.一种电子设备,包括:
17.一种计算机可读存储介质,其上存储有计算机程序,所述计算机程序可由处理器执行以实现根据权利要求1至14任一项所述的方法。
技术总结
本公开的实施例提供一种识别步态的方法、装置、设备和介质。该方法包括:通过解析目标图像序列中的目标对象,生成对应目标对象的部位解析序列,其中部位解析序列用于指示组成目标对象的多个部位在目标图像序列中的相应位置;基于部位解析序列提取目标对象的全局步态特征;基于部位解析序列提取目标对象的多个局部步态特征,其中每个局部步态特征用于表征多个部位中的特定部位;以及基于全局步态特征和局部步态特征的组合,确定目标对象的步态识别结果。本公开的方案,可以基于针对对象的部位解析结果,利用全局特征和局部特征来对目标对象的步态进行解析,以提高步态识别的精度。
技术研发人员:刘鑫辰,刘武,郑锦凯,何晓冬
受保护的技术使用者:北京沃东天骏信息技术有限公司
技术研发日:
技术公布日:2024/1/16
- 还没有人留言评论。精彩留言会获得点赞!