一种基于图神经网络的车辆调度算法的制作方法
本发明涉及车辆调度,具体涉及一种基于图神经网络的车辆调度算法。
背景技术:
1、图神经网络调度算法是用于优化图神经网络学习过程的算法,以最大化神经网络的性能。以下是一些常见的图神经网络调度算法。
2、动态规划是一种用于解决最优化问题的算法,在图神经网络中,可以使用动态规划来找到网络中的最优权重分布,从而最大化神经网络的性能。
3、但现有技术的缺点在于进行调度车辆使用时的数据预处理存在不够详细的问题,特别是前期的网格的建立问题,存在着与实际的行径方向差异问题,导致后期的检测结果与现有实际的检测结果存在较大的出入,因此本发明提供一种基于图神经网络的车辆调度算法。
技术实现思路
1、鉴于上述现有存在的问题,提出了本发明。
2、因此,本发明目的是提供一种基于图神经网络的车辆调度算法,解决了上述的问题。
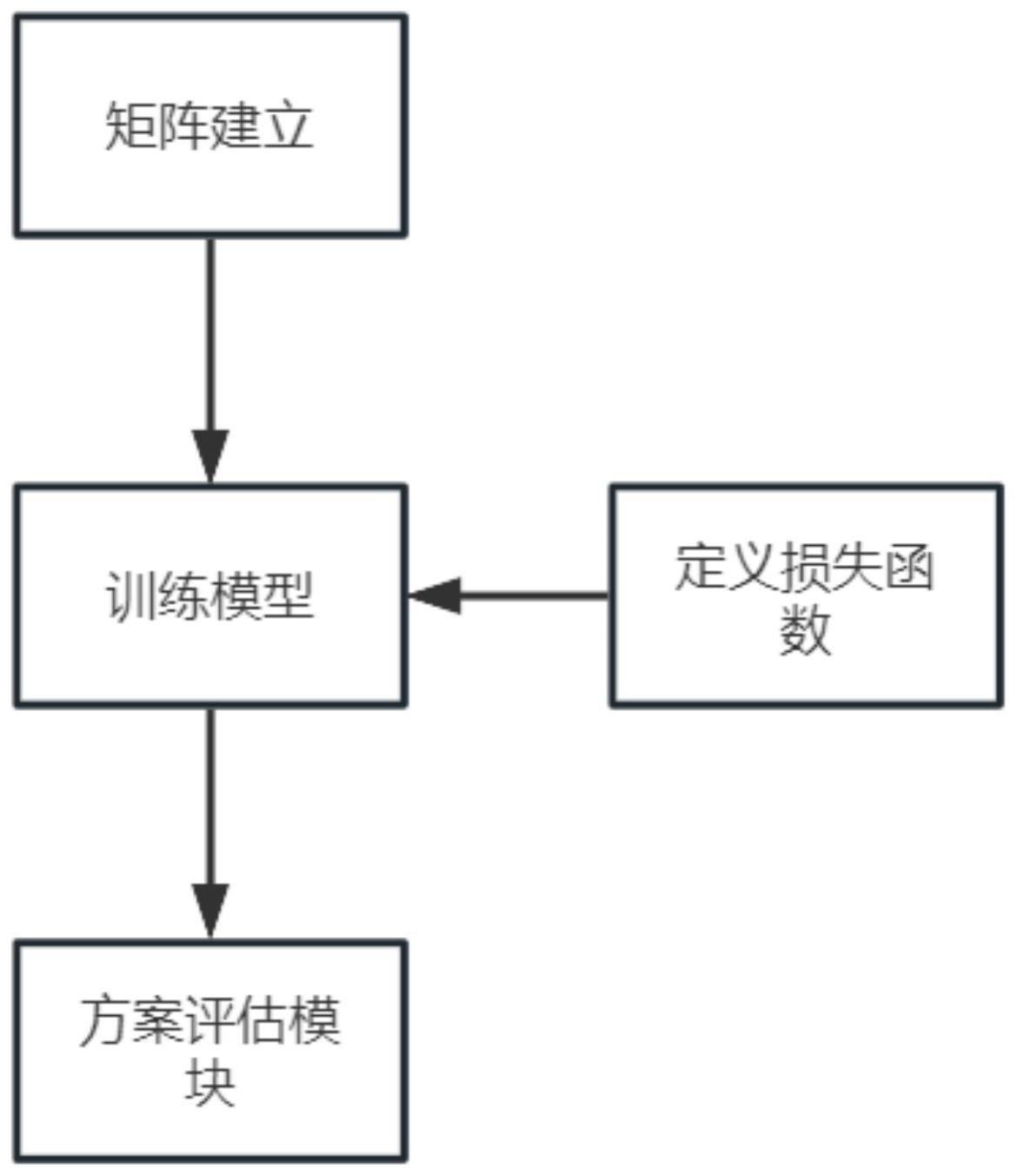
3、为了实现上述目的,本发明提供如下技术方案:一种基于图神经网络的车辆调度算法,包括建立矩阵,定义损失函数,训练模型,方案评估四大模块,其中建立矩模块包括以下内容:
4、s1、通过将车辆的源点以及所要经过的各个汇聚点以及所要行驶的路径时,通过将其调度范围划分成网格,按照车辆在调度区域的可行驶路径进行划分成平面网格将其四个方向的路径按照,相当于x轴与y轴,路径交叉处设置为路径的结点g,其中x轴方向节点数量则为则为gx,y轴方向结点数量则为gy,而通行路径则表示为k,其平面网格所得到的矩阵则是b=gx×gy,其中b表示的就是平面网格,同时通过确定所要调度的车辆位于b的位置,确定b中可以进行移动的路径j,同时通过路面的实际图片信息,进行预备调动;
5、将矩阵中的每个g赋予多个元素,即每一行都有一个元素,根据每个元素对应一个神经元,则每列的元素为gy个,定义位于所在位置的神经元则输出为v,而横向神经元为而s的值取为1,2,3,…,b,而竖向神经元为h的取值为0,1,2,…,b,通过使用能量函数进行反复演化进行收敛,
6、
7、
8、
9、
10、由此得出能量函数的最终结果为
11、e=emin+e有效+e出入+e收敛+e起始
12、其中x为决策变量,其值为0、1,vxs则为神经元s在x值时的输出,而vxh则为神经元h在x值时的输出,其中emin为距离最短的目标位置,e有效表示为有效的路径约束,而e出入则表示输入与输出的路径约束,而e收敛则表示网络收敛约束,在进行使用好似e起始则表示起点与终点的约束,当网络演化至最终的收敛后,形成0和1选择集,其中1所表示为结点的间距、运行时间为最优选,0则表示所得到的结果为非优选,则做排除处理当网络演化至最终的收敛后,形成0和1选择集,其中1所表示为结点的间距、运行时间为最优选,0则表示所得到的结果为非优选,则做排除处理。
13、进一步的,所述定义损失函数包括以下内容:
14、为了确保神经网络稳定的为输出能量提供一个有效的换位矩阵,需要完成约束条件,在进行约束时为了约束有效,进行设置如下的约束函数:同时通过设置
15、
16、
17、其中的n为节点数,p为节点属性,q为边属性,wi和vj分别表示节点i和边j的权重,其中x{ij}以及y{ij}的数值为任意数值。
18、同时为了保证网络的结点输入的路径有效,则必须要设置输出路径,在进行设置输出路径时,则进行设定如下的函数其中的p表示模型预测的输出结果,q表示真实结果,w{ij}表示模型中权重对p{ij}的影响,n表示车辆的数量,i表示第i个车辆,j表示第j个位置,w{ij}的值可以通过训练数据进行计算,通过计算预测结果和真实结果之间的差异,通过对差异进行求导,得到模型的损失值,从而指导模型进行优化,使得模型能够更好地拟合训练数据,并泛化到新的数据上。
19、进一步的,所述训练模型包括以下内容:
20、通过反复迭代,使得模型可以逐渐学习到车辆调度的规律,通过使用网格搜索算法来找到模型的最优参数,该算法将数据集划分为许多小网格,并在每个网格上搜索最优参数,通过反复迭代,找到最佳的参数组合。
21、进一步的,所述方案评估模块包括以下内容:
22、步骤一、评估模型的性能,通过计算模型的准确率、召回率判断模型的性能和优劣的算法,通过验证准确率模型预测正确的比例,模型将数据集中的真实标签预测为正例的比例,召回率是评估模型性能的重要指标之一,表示模型能够将数据集中的真实标签预测出来,平均绝对误差在预测一个未标注的样本时,该样本的真实标签与模型预测的标签之间的差异的绝对值,精确率为模型预测为正例的比例,即实际为正例的样本中,模型预测为正例的比例,同时,不同的指标也适用于不同的应用场景,通过选择最优的调度方案,计算模型的输出结果,得到最优的车辆调度方案。
23、进一步的,所述矩阵中的每个g赋予多个元素,中的多个元素包括有行驶距离,车辆初始距离,车辆长度,车辆调度行驶路程作为参照依据
24、在上述技术方案中,本发明提供的技术效果和优点:
25、1、本发明通过将车辆的源点以及所要经过的各个汇聚点以及所要行驶的路径时,通过将其调度范围划分成网格,按照车辆在调度区域的可行驶路径进行划分成平面网格将其四个方向的路径按照,通过实际的路面信息进行是预备调动,是为了在进行训练时,通过在进行确定要调度的车辆时,会提前进行调取实际的路径图片信息,通过将其划分成四个方向的平面路径,同时能够更为直观的为后期的展示已经操作者观察各个调度车辆的位置行进情况。
26、2、本发明通过根据车辆的距离,来作为元素能够根据路径的距离来进行的路径选择,而车辆长度是为了确定车辆的长度,将车辆的长度作为影响最优路径的筛选,从而得到合适的路径,而车辆调度的行驶路程则是根据合适的路径中选择最优的路径。
技术特征:
1.一种基于图神经网络的车辆调度算法,其特征在于,包括建立矩阵,定义损失函数,训练模型,方案评估四大模块,其中建立矩模块包括以下内容:
2.根据权利要求1所述的基于图神经网络的车辆调度算法,其特征在于,所述定义损失函数包括以下内容:
3.根据权利要求1所述的基于图神经网络的车辆调度算法,其特征在于,所述训练模型包括以下内容:
4.根据权利要求1所述的基于图神经网络的车辆调度算法,其特征在于,所述方案评估模块包括以下内容:
5.根据权利要求1所述的基于图神经网络的车辆调度算法,其特征在于,所述矩阵中的每个g赋予多个元素,矩阵中的多个元素包括有行驶距离,车辆初始距离,车辆长度,车辆调度行驶路程作为参照依据。
技术总结
本发明公开了一种基于图神经网络的车辆调度算法,涉及车辆调度技术领域,包括建立矩阵,定义损失函数,训练模型,方案评估四大模块,其中建立矩模块包括以下内容:通过将车辆的源点以及所要经过的各个汇聚点以及所要行驶的路径时,通过将其调度范围划分成网格,按照车辆在调度区域的可行驶路径进行划分成平面网格将其四个方向的路径按照,本发明通过根据车辆的距离,来作为元素能够根据路径的距离来进行的路径选择,而车辆长度是为了确定车辆的长度,将车辆的长度作为影响最优路径的筛选,从而得到合适的路径,而车辆调度的行驶路程则是根据合适的路径中选择最优的路径。
技术研发人员:陈锦昌,陈锦杰
受保护的技术使用者:旷锐(厦门)科技有限公司
技术研发日:
技术公布日:2024/1/16
- 还没有人留言评论。精彩留言会获得点赞!