一种模型自动学习方法、装置、划片机及介质与流程
本申请涉及半导体器件切割领域,特别涉及一种模型自动学习方法、装置、划片机及计算机可读存储介质。
背景技术:
1、划片机是半导体器件集成电路生产中不可或缺的设备,其主要功能是将半导体器件切割成一个个独立的芯片元件,为了避免划片机在切割过程中发生偏差。现有技术中通常采用人工完成模型教学,利用教学过程获取的模型图像和所需参数进行切割道对准调节,然后给划片机提供准确的下刀位置。然而,人工模型教学,需要人工手动测量芯片步长和切割道与模型图像的相对位置,手动测量效率低,测量得到的参数误差大。人工模型教学,需要人工选择模型图像,要求操作员对图像基础知识有较高的要求,要求操作员理解图像纹理复杂度,如果手动选择模型简单或者视域内有相似度较高的区域,在自动对准的时会增加误识别的概率,严重的甚至会导致切割偏差。因此,如何提高划片机自动对准的精度,是本领域技术人员目前需要解决的技术问题。
技术实现思路
1、本申请的目的是提供一种模型自动学习方法、装置、划片机及计算机可读存储介质,能够实现自动获取划片机切割对准所需的目标模型图像与参数,从而减少了人工干预,提高了自动对准的精度,提高了半导体器件的切割效率与切割良品率。
2、为实现上述目的,本申请提供了一种模型自动学习方法,包括:
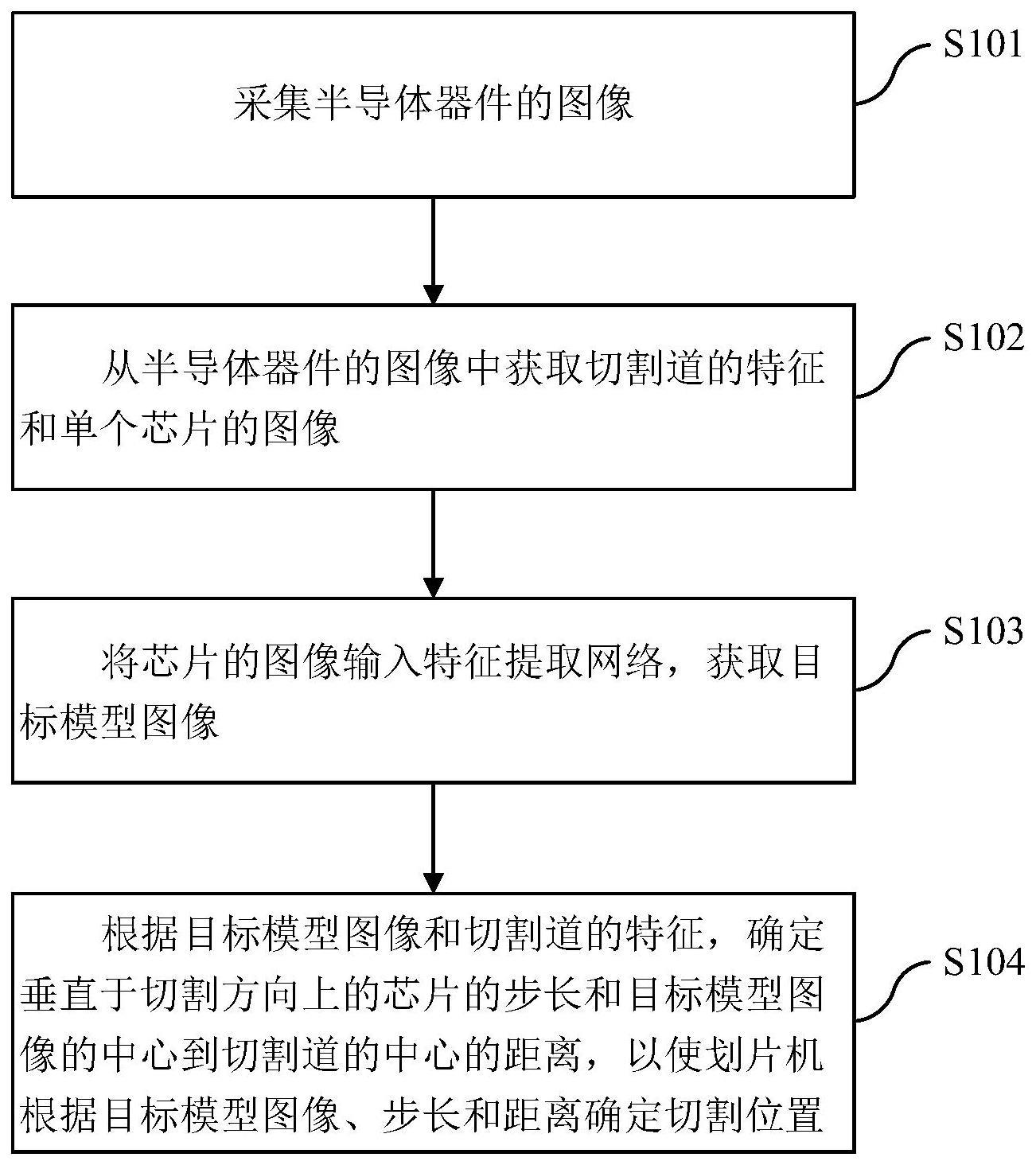
3、采集半导体器件的图像;
4、从所述半导体器件的图像中获取切割道的特征和单个芯片的图像;
5、将所述芯片的图像输入特征提取网络,获取目标模型图像;
6、根据所述目标模型图像和所述切割道的特征,确定垂直于切割方向上的所述芯片的步长和所述目标模型图像的中心到所述切割道的中心的距离,以使划片机根据所述目标模型图像、所述步长和所述距离确定切割位置。
7、可选的,从所述半导体器件的图像中获取切割道的特征和单个芯片的图像,包括:
8、从所述半导体器件的图像中获取所述切割道的特征;
9、根据所述切割道的特征,从所述半导体器件的图像中获取单个所述芯片的图像。
10、可选的,从所述半导体器件的图像中获取所述切割道的特征,包括:
11、通过梯度法从所述半导体器件的图像中获取所述切割道的特征。
12、可选的,将所述芯片的图像输入特征提取网络,获取目标模型图像,包括:
13、将所述芯片的图像输入特征提取网络,获取唯一的且具有目标复杂度和目标对比度的模型图像,将所述模型图像作为所述目标模型图像。
14、可选的,所述采集半导体器件的图像,包括:
15、按预设扫描路径采集所述半导体器件的图像,以使所述半导体器件的图像包括完整的单个所述芯片的图像。
16、可选的,根据所述目标模型图像和所述切割道的特征,确定垂直于切割方向上的所述芯片的步长和所述目标模型图像的中心到所述切割道的中心的距离,包括:
17、根据所述目标模型图像,确定垂直于所述切割方向上的所述芯片的步长;
18、根据所述芯片的步长和所述切割道的特征,确定垂直于所述切割方向上的所述切割道的顶端位置和底端位置;
19、根据所述目标模型图像的位置与所述切割道的顶端位置和底端位置,确定垂直于所述切割方向上的所述目标模型图像的中心到所述切割道的中心的距离。
20、可选的,根据所述目标模型图像,确定垂直于所述切割方向上的所述芯片的步长,包括:
21、根据所述目标模型图像,通过模型匹配方法确定垂直于所述切割方向上的所述芯片的步长。
22、为实现上述目的,本申请还提供了一种模型自动学习装置,包括:
23、图像采集模块,用于采集半导体器件的图像;
24、图像处理模块,用于从所述半导体器件的图像中获取切割道的特征和单个芯片的图像;
25、目标模型图像获取模块,用于将所述芯片的图像输入特征提取网络,获取目标模型图像;
26、参数获取模块,用于根据所述目标模型图像和所述切割道的特征,确定垂直于切割方向上的所述芯片的步长和所述目标模型图像的中心到所述切割道的中心的距离,以使划片机根据所述目标模型图像、所述步长和所述距离确定切割位置。
27、为实现上述目的,本申请还提供了一种划片机设备,包括:
28、存储器,用于存储计算机程序;
29、处理器,用于执行所述计算机程序时实现如上述所述的模型自动学习方法的步骤。
30、为实现上述目的,本申请还提供了一种计算机可读存储介质,所述计算机可读存储介质上存储有计算机程序,所述计算机程序被处理器执行时实现如上述所述的模型自动学习方法的步骤。
31、显然,本申请首先从采集到的半导体器件图像中,获取切割道的特征和单个芯片的图像;然后将得到的芯片图像输入到特征提取网络中,能够自动获取合适的图案作为目标模型图像;最后根据切割道的特征和目标模型图像,计算出垂直于切割方向上的芯片的步长,以及垂直于切割方向上的目标模型图像的中心到切割道的中心的距离。与传统的人工模型教学方式相比,能够实现自动获取划片机切割对准所需的目标模型图像与参数,从而减少了人工干预,保证了芯片步长精度和半导体器件切割道与模型图像相对位置的精度,提高了半导体器件的切割效率与切割良品率。本申请还提供一种模型自动学习装置、划片机及计算机可读存储介质,具有上述有益效果。
技术特征:
1.一种模型自动学习方法,其特征在于,包括:
2.根据权利要求1所述的模型自动学习方法,其特征在于,从所述半导体器件的图像中获取切割道的特征和单个芯片的图像,包括:
3.根据权利要求2所述的模型自动学习方法,其特征在于,从所述半导体器件的图像中获取所述切割道的特征,包括:
4.根据权利要求1所述的模型自动学习方法,其特征在于,将所述芯片的图像输入特征提取网络,获取目标模型图像,包括:
5.根据权利要求1所述的模型自动学习方法,其特征在于,所述采集半导体器件的图像,包括:
6.根据权利要求1至5任一项所述的模型自动学习方法,其特征在于,根据所述目标模型图像和所述切割道的特征,确定垂直于切割方向上的所述芯片的步长和所述目标模型图像的中心到所述切割道的中心的距离,包括:
7.根据权利要求6所述的模型自动学习方法,其特征在于,根据所述目标模型图像,确定垂直于所述切割方向上的所述芯片的步长,包括:
8.一种模型自动学习装置,其特征在于,包括:
9.一种划片机,其特征在于,包括:
10.一种计算机可读存储介质,其特征在于:所述计算机可读存储介质上存储有计算机程序,所述计算机程序被处理器执行时实现如权利要求1至7任一项所述的模型自动学习方法的步骤。
技术总结
本申请公开了一种模型自动学习方法、装置、划片机及介质,属于半导体器件切割领域,该方法包括:采集半导体器件的图像;从所述半导体器件的图像中获取切割道的特征和单个芯片的图像;将所述芯片的图像输入特征提取网络,获取目标模型图像;根据所述目标模型图像和所述切割道的特征,确定垂直于切割方向上的所述芯片的步长和所述目标模型图像的中心到所述切割道的中心的距离,以使划片机根据所述目标模型图像、所述步长和所述距离确定切割位置。本申请与传统的人工模型教学方式相比,能够实现自动获取划片机切割对准所需的目标模型图像与参数,从而减少了人工干预,提高了自动对准的精度,提高了半导体器件的切割效率与切割良品率。
技术研发人员:赵彤宇,胡洋洋,陈众威,冯腾飞,兰剑
受保护的技术使用者:光力瑞弘电子科技有限公司
技术研发日:
技术公布日:2024/1/16
- 还没有人留言评论。精彩留言会获得点赞!