一种基于欧拉法的杆系结构大变形计算方法
本发明涉及结构变形计算领域,尤其是涉及一种基于欧拉法的杆系结构大变形计算方法。
背景技术:
1、结构大变形(几何非线性)是结构非线性分析中的重要内容之一。几何非线性,即结构在变形过程中,节点位移或转动较大,位移和应变之间的关系随着结构变形而改变。随着载荷的增加,结构在变形的过程中刚度会不断变化,其平衡状态也会因此发生变化。在变形较大的情况下,一阶线性几何方程计算引起的误差较大,为了提高计算精度就需要考虑二阶甚至高阶几何方程。几何非线性的重要特点是:需要在结构变形后的几何位置上建立结构的平衡方程,但是这个几何位置通常是未知的。在面对结构大变形情况时,我们需要明确如何定义应力和应变,以及选择哪个状态来描述所有的物理量。在非线性分析中,采用不同的参考坐标系,对变形前后的物理量也会有不同的表达形式。
2、目前,广泛应用于几何非线性分析领域的方法是三维连续体虚功增量方程法。这种方法采用有限变形理论来描述连续体的变形过程,通过逐步确定各个阶段的位移、应力和应变增量,以求解整个变形过程。从一个已知状态t时刻的位移、应力、应变开始,确定由t时刻到t+δt时刻的位移、应力和应变增量,由此能够得到t+δt时刻的各项物理量。在下一步加载中,t+δt时刻的状态就变成己知状态,重复上述过程,就可以求得t+2δt时刻的状态。通过这样的增量求解过程,便可以得到结构的最终状态和整个过程的变化量。需要注意的是,增量法求解中的基本未知量是各个状态的增量,而不是状态量本身。确定增量的基本方程是三维体虚功增量方程,有两种常用的表达方法:总体的拉格朗日列式法(totallagrangian formulation,简称t.l列式法)和更新的拉格朗日列式法(updatedlagrangian formulation,简称u.l列式法)。
3、t.l列式法在整个变形过程中,始终以0时刻的初始状态为参考状态,据此建立增量方程。u.l列式法假设t时刻的所有状态变量已求得,以t时刻的状态为参考状态,再求得t+δt时刻的状态变量,然后以t+δt时刻的状态为参考状态,再求得t+2δt时刻的状态变量,这样参考状态每一步都会进行更新,总是以当前已求得的状态作为下一阶段计算的参考状态。两种方法都是增量形式的有限元列式方法,是将荷载变形过程划分为一系列的增量段,每个增量段中的结构荷载反应被近似地线性化,在每个增量段计算中进行多次迭代。
4、在t.l列式法中,每次增量计算的方程都建立在初始位形上,可能会导致在大转角问题分析中计算无法收敛甚至报错,而且单元刚度矩阵中包含弹性刚度矩阵、几何刚度矩阵、大位移矩阵等,过程较为复杂和繁琐。在u.l列式法中,单元的两个节点按照局部坐标系与整体坐标系之间的euler角度进行变换,这样做会导致单元两端的坐标转换矩阵不同,也不能考虑单元弯曲变形的影响,而且每一步的迭代计算都需要重新计算坐标转换矩阵,计算效率有待提升。目前,仍缺少一种适应性广、精准度高、收敛快速的结构几何非线性变形计算方法。
技术实现思路
1、本发明的目的是为了提供一种基于欧拉法的杆系结构大变形计算方法,对结构大变形位移进行快速、准确的计算。
2、本发明的目的可以通过以下技术方案来实现:
3、一种基于欧拉法的杆系结构大变形计算方法,包括以下步骤:
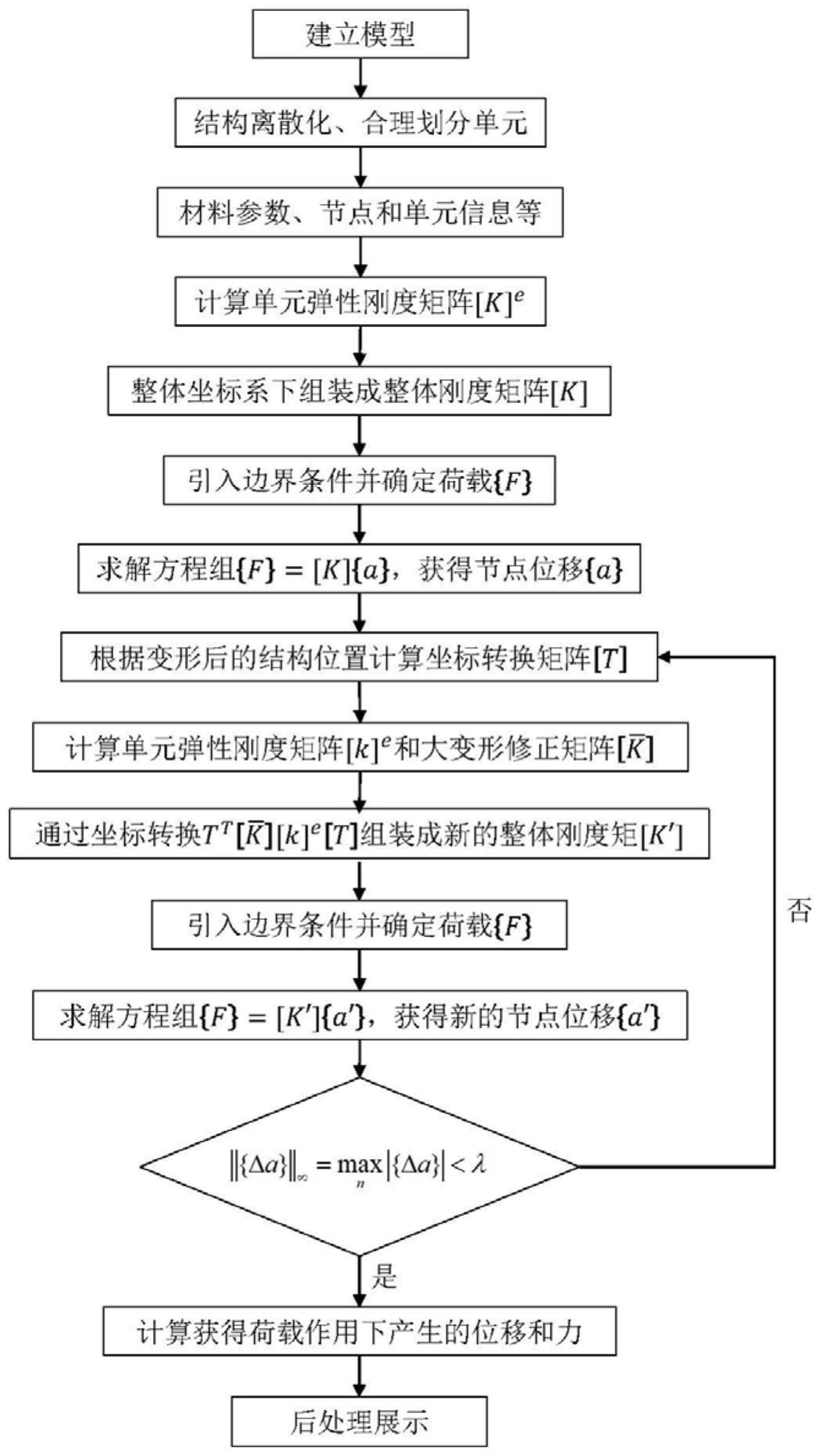
4、步骤1)获取待分析的结构信息并进行离散化,划分单元;
5、步骤2)求解各单元在局部坐标系下的单元弹性刚度矩阵,并在整体坐标系下进行组装得到整体刚度矩阵;添加边界条件和施加外力,建立结构刚度方程,求解得到结构在小变形条件下的整体位移和单元的节点位移;
6、步骤3)根据变形后的结构位置建立单元整体坐标系和局部坐标系及其联系,确定单元的坐标转换矩阵;
7、步骤4)根据结构大变形的真实内力与位移的关系、梁的挠曲线微分方程和曲率公式确定杆系结构大变形修正矩阵;
8、步骤5)利用杆系结构大变形修正矩阵、坐标转换矩阵对单元弹性刚度矩阵进行修正,基于有限元计算方法和欧拉描述建立新的结构刚度方程,并设立收敛准则对方程进行迭代计算,获得杆系结构大变形的位移计算结果。
9、所述坐标转换矩阵为:
10、
11、
12、其中,[t]为坐标转换矩阵,[t]为节点转换矩阵,为根据变形后结构位置建立的单元局部坐标系坐标轴。
13、所述杆系结构大变形修正矩阵为:
14、
15、其中,为杆系结构大变形修正矩阵,vn为轴向修正系数,αy、αz、βy、βz为弯矩修正系数,γy、γz为剪力修正系数。
16、所述利用杆系结构大变形修正矩阵、坐标转换矩阵对单元弹性刚度矩阵进行修正的计算方法为:
17、
18、其中,是杆系结构大变形修正矩阵,[k]e是空间梁单元的弹性刚度矩阵,[t]是坐标转换矩阵,[k]e为修正后的单元弹性刚度矩阵。
19、所述收敛准则为:
20、
21、其中,{δa}为位移差值向量,‖{δa}‖∞为位移差值向量中绝对值的最大值,λ为预先指定的一个非常小的数。
22、与现有技术相比,本发明具有以下有益效果:
23、本发明基于欧拉法,提出一种新的结构大变形计算方法,该方法直接用变形后的节点位置作为基本未知量,并引入大变形修正矩阵,相比于现有的一些几何非线性分析方法,迭代计算过程不同,理论过程上更加简洁高效,收敛性能和计算效率更好,计算结果精准度高。
技术特征:
1.一种基于欧拉法的杆系结构大变形计算方法,其特征在于,包括以下步骤:
2.根据权利要求1所述的一种基于欧拉法的杆系结构大变形计算方法,其特征在于,所述坐标转换矩阵为:
3.根据权利要求1所述的一种基于欧拉法的杆系结构大变形计算方法,其特征在于,所述杆系结构大变形修正矩阵为:
4.根据权利要求1所述的一种基于欧拉法的杆系结构大变形计算方法,其特征在于,所述利用杆系结构大变形修正矩阵、坐标转换矩阵对单元弹性刚度矩阵进行修正的计算方法为:
5.根据权利要求1所述的一种基于欧拉法的杆系结构大变形计算方法,其特征在于,所述收敛准则为:
技术总结
本发明涉及一种基于欧拉法的杆系结构大变形计算方法,包括以下步骤:获取待分析的结构信息并进行离散化,划分单元;求解各单元在局部坐标系下的单元弹性刚度矩阵,并组装得到整体刚度矩阵;添加边界条件和施加外力,建立结构刚度方程,求解结构在小变形条件下的位移;根据变形后的结构位置建立单元整体坐标系和局部坐标系及其联系,确定坐标转换矩阵;确定杆系结构大变形修正矩阵;利用杆系结构大变形修正矩阵、坐标转换矩阵对单元弹性刚度矩阵进行修正,基于有限元计算方法和欧拉描述建立新的结构刚度方程,并设立收敛准则对方程进行迭代计算,获得杆系结构大变形的位移计算结果。与现有技术相比,本发明具有精度高、求解效率高等优点。
技术研发人员:刘超,刘永旗
受保护的技术使用者:同济大学
技术研发日:
技术公布日:2024/1/16
- 还没有人留言评论。精彩留言会获得点赞!