一种分节段拼装大跨径组合梁斜拉桥主梁线形修正方法与流程
本发明涉及桥梁施工,尤其涉及一种分节段拼装大跨径组合梁斜拉桥主梁线形修正方法。
背景技术:
1、对于分节段拼装大跨径组合梁斜拉桥,其主梁线形控制精度直接影响成桥质量,由于组合梁斜拉桥为高次超静定结构,在施工过程中伴随结构体系不断转化,线形偏位难以避免,如果不进行及时修正,成桥后可能出现一定的残余应力,降低梁体的受力安全性。为提高分节段拼装大跨径组合梁斜拉桥的主梁线形控制精度,提出一种线形偏位体系转换法方法。
技术实现思路
1、本发明的目的是为了解决现有技术中的问题,而提出的一种分节段拼装大跨径组合梁斜拉桥主梁线形修正方法。
2、一种分节段拼装大跨径组合梁斜拉桥主梁线形修正方法,包括以下步骤:
3、s1、建立用以识别主梁线形状态的空间坐标系统,以主梁节段两端控制点水平坐标与高程为基本变量,推导理想状态下的梁段对接传递矩阵;
4、s2、基于已拼装梁段上各控制点实际坐标与设计坐标差,构造梁段线形偏位向量与偏位平方和表达式;
5、s3、通过求解偏微分方程极值,对已拼装梁段线形进行计算转化,得到整体线形偏位离散度最低时的“转换线形”;
6、s4、通过比较“转换线形”与“理论线形”,对待拼装梁段拼装线形进行修正。
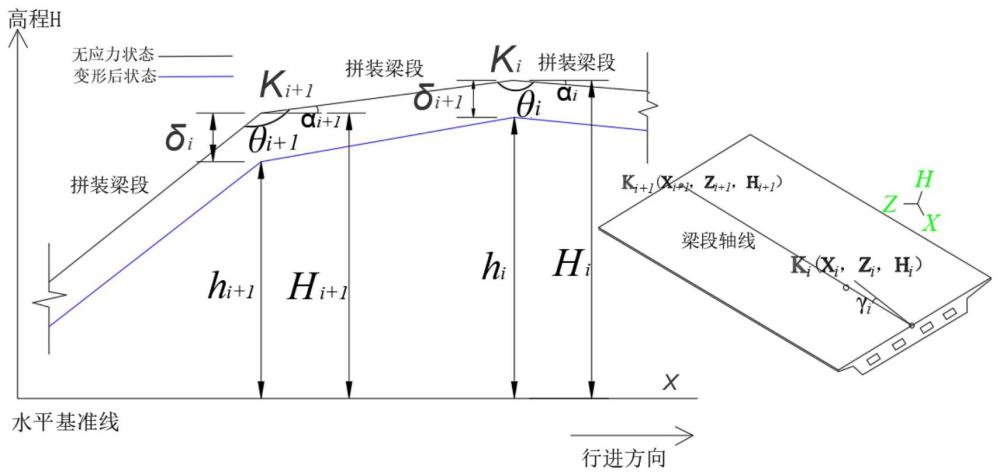
7、在上述的一种分节段拼装大跨径组合梁斜拉桥主梁线形修正方法中,所述步骤s1中,以各拼装梁段中轴线两端节点为控制点,设ki为梁段i尾端控制点编号,xi、zi分别为平面顺桥向、横桥向水平坐标,hi为高程,则梁段kiki+1线形可由梁端控制点ki、ki+1坐标确定,假定已拼装梁段数为i,首段梁号为1,尾段梁号相应为i,设该工况下控制点ki状态向量vi={hi,xi,zi,αi,θi,γi}t,其中hi、xi、zi为控制点坐标,αi为实际梁段i轴线水平角,θi、γi分别为梁段i与待拼梁段i+1轴线竖向夹角与水平夹角,另设传递因子ki、ni、ji,满足αi+1=ki·αi,θi+1=ni·θi,γi+1=ji·γi,其中ki、ni、ji可由梁段无应力状态线形与“理论线形”确定,有:
8、
9、上式可表达为:
10、{vi+1}=[k]{vi}
11、[k]为状态向量传递矩阵。
12、在上述的一种分节段拼装大跨径组合梁斜拉桥主梁线形修正方法中,所述步骤s2中,以行进方向首段梁头控制点ki为原点,构造笛卡尔三维坐标系,设某一工况下已拼装梁段数为i,梁段实际线形已知,分别构造主梁轴线水平向偏位向量ez与轴线竖向偏位向量eh:
13、ez={z,△z1,△z2,…△zi|t
14、eh={h,△h1,△h2,…△hi}t
15、其中,△z1、△h1为实测控制点ki水平向偏位与竖向偏位值,h为首段梁前侧控制点高程。
16、在上述的一种分节段拼装大跨径组合梁斜拉桥主梁线形修正方法中,所述步骤s2中,以z、β、h、α为自由变量,根据几何关系求得各控制点高程偏位△zi、△hi与z、β、h、α关系如下:
17、
18、
19、根据上述式分别构造出已拼装梁段控制点水平向偏位值平方和表达式r(γ,z)与竖向偏位值平方和表达式e(α,h),如下:
20、
21、
22、在上述的一种分节段拼装大跨径组合梁斜拉桥主梁线形修正方法中,所述步骤s3中,当r、e达到最小水平时整体线形偏位离散程度最弱,认为整体线形控制最佳,根据上述偏微分方程求得线形偏位平方和公式e(α,h)、r(γ,z)最小时γc、zc、αc、hc值对应的线形状态,设为“转换线形”。
23、在上述的一种分节段拼装大跨径组合梁斜拉桥主梁线形修正方法中,所述步骤s4中,求得的“转换线形”中梁段i尾部控制点ki+1与当前工况下理论线形中梁段i+1尾部节点作为实际待拼梁段i+1梁头拼装定位点,可确定实际梁段i+1定位坐标,完成线形修正,此时控制点状态向量{vi+1}中zi+1、hi+1增加修正增项△zci+1、△hci+1,设修正向量:
24、{vc}={0,△hci+1,△zci+1,0,0,0}t
25、修正后待拼梁段控制点ki+1、ki状态向量传递关系如下:
26、{vi+1}=[k]{vi}+{vc}
27、与现有的技术相比,本发明优点在于:
28、本发明中线形修正方法对理想状态下的传递矩阵法进行了修正,可实现对节段拼装大跨径组合梁斜拉桥主梁纵轴线水平向偏位与竖向偏位的阶段性矫正,便于及时修正,避免成桥后出现一定的残余应力。
技术特征:
1.一种分节段拼装大跨径组合梁斜拉桥主梁线形修正方法,其特征在于:包括以下步骤:
2.根据权利要求1所述的一种分节段拼装大跨径组合梁斜拉桥主梁线形修正方法,其特征在于:所述步骤s1中,以各拼装梁段中轴线两端节点为控制点,设ki为梁段i尾端控制点编号,xi、zi分别为平面顺桥向、横桥向水平坐标,hi为高程,则梁段kiki+1线形可由梁端控制点ki、ki+1坐标确定,假定已拼装梁段数为i,首段梁号为1,尾段梁号相应为i,设该工况下控制点ki状态向量vi={hi,xi,zi,αi,θi,γi}t,其中hi、xi、zi为控制点坐标,αi为实际梁段i轴线水平角,θi、γi分别为梁段i与待拼梁段i+1轴线竖向夹角与水平夹角,另设传递因子ki、ni、ji,满足αi+1=ki·αi,θi+1=ni·θi,γi+1=ji·γi,其中ki、ni、ji可由梁段无应力状态线形与“理论线形”确定,有:
3.根据权利要求2所述的一种分节段拼装大跨径组合梁斜拉桥主梁线形修正方法,其特征在于:所述步骤s2中,以行进方向首段梁头控制点ki为原点,构造笛卡尔三维坐标系,设某一工况下已拼装梁段数为i,梁段实际线形已知,分别构造主梁轴线水平向偏位向量ez与轴线竖向偏位向量eh:
4.根据权利要求3所述的一种分节段拼装大跨径组合梁斜拉桥主梁线形修正方法,其特征在于:所述步骤s2中,以z、β、h、α为自由变量,根据几何关系求得各控制点高程偏位△zi、△hi与z、β、h、α关系如下:
5.根据权利要求4所述的一种分节段拼装大跨径组合梁斜拉桥主梁线形修正方法,其特征在于:所述步骤s3中,当r、e达到最小水平时整体线形偏位离散程度最弱,认为整体线形控制最佳,根据上述偏微分方程求得线形偏位平方和公式e(α,h)、r(γ,z)最小时γc、zc、αc、hc值对应的线形状态,设为“转换线形”。
6.根据权利要求5所述的一种分节段拼装大跨径组合梁斜拉桥主梁线形修正方法,其特征在于:所述步骤s4中,求得的“转换线形”中梁段i尾部控制点ki+1与当前工况下理论线形中梁段i+1尾部节点作为实际待拼梁段i+1梁头拼装定位点,可确定实际梁段i+1定位坐标,完成线形修正,此时控制点状态向量{vi+1}中zi+1、hi+1增加修正增项△zci+1、△hci+1,设修正向量:
技术总结
本发明公开了一种分节段拼装大跨径组合梁斜拉桥主梁线形修正方法,涉及桥梁施工技术领域,包括以下步骤:S1、建立用以识别主梁线形状态的空间坐标系统,以主梁节段两端控制点水平坐标与高程为基本变量,推导理想状态下的梁段对接传递矩阵;S2、基于已拼装梁段上各控制点实际坐标与设计坐标差,构造梁段线形偏位向量与偏位平方和表达式;本发明中线形修正方法对理想状态下的传递矩阵法进行了修正,可实现对节段拼装大跨径组合梁斜拉桥主梁纵轴线水平向偏位与竖向偏位的阶段性矫正,便于及时修正,避免成桥后出现一定的残余应力。
技术研发人员:杨康,章文彬,赵钱,李传友,王志豪,范广志,李镇,王慧可,张攀昆
受保护的技术使用者:中交二航局第四工程有限公司
技术研发日:
技术公布日:2024/2/1
- 还没有人留言评论。精彩留言会获得点赞!