一种水泵水轮机S区特性曲线预测方法及系统
本申请涉及流体机械及工程设备的,尤其涉及一种水泵水轮机s区特性曲线预测方法及系统。
背景技术:
1、抽水蓄能是当前技术最成熟、经济性最优、最具大规模开发条件的电力系统绿色低碳清洁灵活调节电源。在以风能、太阳能为代表的现代能源体系中,抽水蓄能正在经历快速发展。水泵水轮机转轮是抽水蓄能能量转换的核心部件,然而其s区特性将直接威胁能量转换的稳定和安全。比如,造成启动并网困难,甩负荷不稳定性问题等。目前,转轮s区特性通常通过试验或数值模拟获得,然而模型加工与测试需要消耗大量试验经费,数值精确模拟则需要消耗大量时间和计算资源。因此,如何低成本、快速、准确地获取转轮的s区特性曲线是一个亟待解决的问题。
技术实现思路
1、有鉴于此,本申请公开的一种水泵水轮机s区特性曲线预测方法要解决的技术问题是:理论预测水泵水轮机s区特性曲线。根据欧拉方程和能量方程推导了描述转轮s特性曲线的数学模型。随后,引入修正系数以扩大理论模型适用范围,并通过特征点对未知系数进行求解以确定该模型。本发明所提出的预测方法具有非常高的可信度,并可应用于任意比转速水泵水轮机s区特性曲线预测,对加快转轮水力设计流程具有重要作用。
2、基于上述问题,本发明采用如下技术方案:
3、一种水泵水轮机s区特性曲线预测方法,包含以下步骤:
4、步骤1:获取水轮机效率项、转轮流动摩擦损失项、转轮冲击损失项和尾水管旋流损失项;
5、步骤2:将步骤1中的各项带入机组进口和出口断面之间的能量守恒方程建立控制方程;
6、步骤3:为步骤2中的控制方程中引入修正系数,构建s区特性曲线预测模型;
7、步骤4:从特性曲线上取多组不同工况的单位转速和单位流量值作为特征点,求解步骤3预测模型中的未知修正系数,完成曲线预测。
8、进一步地,所述步骤1中水轮机效率项获取方法如下:
9、根据动量矩定理,水轮机基本方程式为:
10、
11、
12、其中,ω为旋转角速度,g为重力加速度,vu1和vu分别为转轮进口和出口绝对速度在圆周方向上的分量,r1和r2分别转轮中间流面进口和出口半径,ηt为水轮机效率项;
13、根据转轮进出口速度三角形有如下关系:
14、
15、
16、其中,vm1为进口绝对速度在径向分量,vm2为出口绝对速度在径向分量,u2为出口圆周速度,α1为进口液流角,β2为转轮出口液流角,q为流量,b1为叶片进口宽度,b2叶片出口宽度。
17、进一步地,所述步骤1中转轮流动摩擦损失项获取方法如下:
18、流动摩擦损失项与流量平方成正比,以转轮出口面积作为参考面积可以得到:
19、
20、单位转速n11和单位流量q11分别设定如下:
21、
22、
23、则流动摩擦损失项为:
24、
25、其中,n为转速,q为流量,d1为转轮高压边直径,d2为转轮叶片出口边直径,h为水头,ζq为流动摩擦损失系数。
26、进一步地,所述步骤1中转轮冲击损失项获取方法如下:
27、
28、β1b为叶片进口安放角,μsh为冲击损失系数,根据进口速度三角形关系,w1=vm1/sin(β1),tan(β1)=vm1/(u1-vm1/tan(α1)),代入上式,并带入单位流量和单位转速表达式,整理可得冲击损失项为:
29、
30、其中,其中,β1为转轮进口液流角,b1为叶片进口宽度。
31、进一步地,所述步骤1中尾水管旋流损失项获取方法如下:
32、
33、根据转轮出口速度三角形关系,vu2=u1-vm2cotβ2,其中vm2=q/r2b2,u1=2r2πn,同时代入单位流量和单位转轮的表达式,整理可得旋流损失项为:
34、
35、其中,ηsw为尾水管旋流损失项,μsw为旋流损失系数。
36、进一步地,所述步骤2中,机组进口和出口断面之间部分应用能量守恒方程为:
37、
38、其中,h为转轮总水头,hc为蜗壳水力损失,hsv为固定导叶水力损失,hgv为活动导叶水力损失,hd为尾水管损失,转轮内损失项包括三项,分别为转轮有效利用水头hr,流动摩擦损失水头hq,冲击损失水头hi;
39、略去蜗壳、固定导叶和活动导叶内损失,同时等式两端同时除以总水头有:
40、1=ηt+δηq+δηsh+δηd
41、将水轮机效率项,流动摩擦损失项和冲击损失项和旋流损失项,带入能量平衡方程式,得到控制方程为:
42、
43、
44、
45、
46、其中,μsh为冲击损失系数,β1b为叶片进口安放角、μsw为旋流损失系数。
47、进一步地,所述步骤3中,将控制方程中左端三项各引入一项修正系数,即:
48、
49、其中,ct1,ct2和ct3均为修正系数。
50、进一步地,从相应的导叶开度上,取三个或三个以上控制点处的单位转速n11,单位流量q11分别求解s区特性曲线中求解未知的修正系数ct1,ct2和ct3,完成s区特性曲线预测。
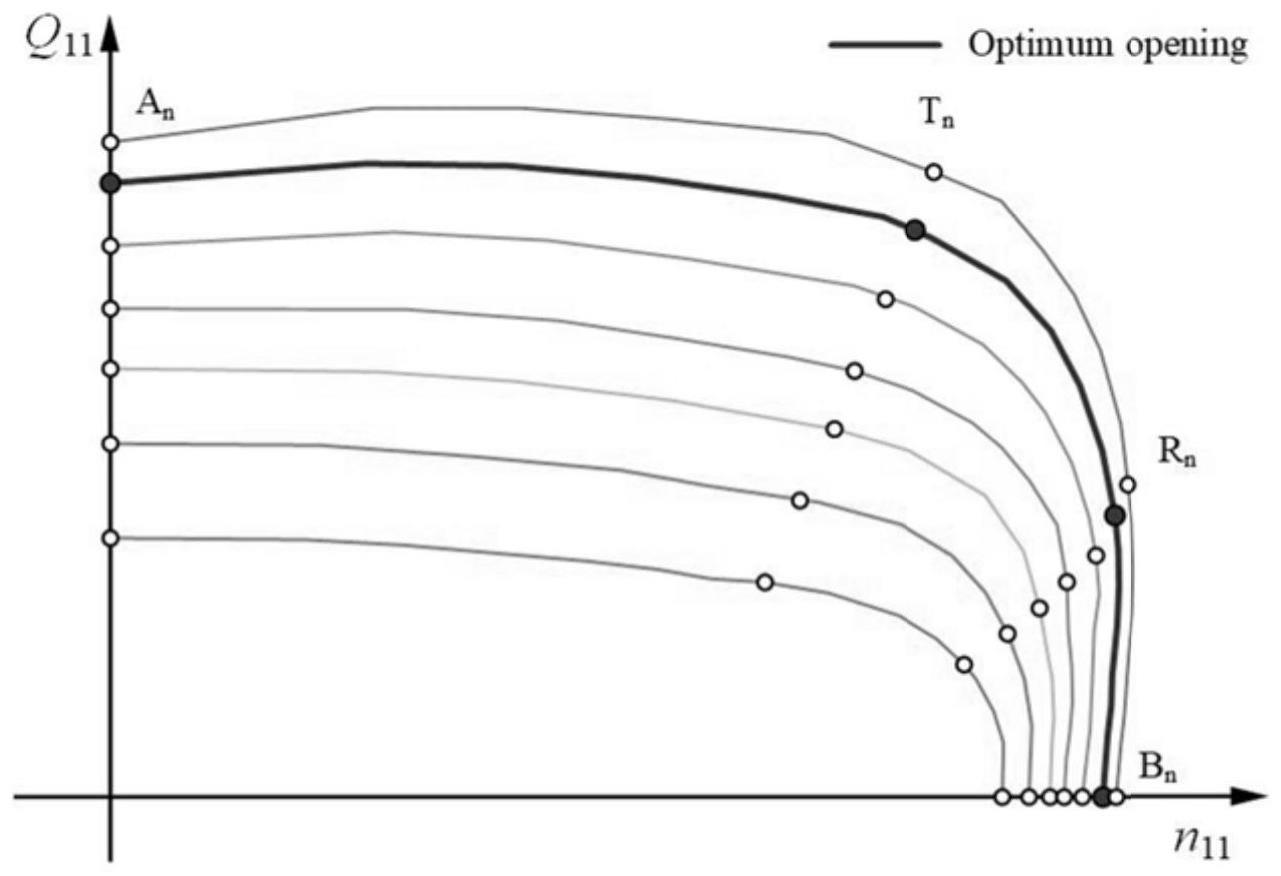
51、进一步地,以水轮机工况最优开度线为对象将开度线与q11轴交点记为a,水轮机最优点记为t,飞逸点记为r,与n11轴正方向交点记为b,所有开度线上相应特征点组成的集合分别记为an,tn,rn,bn,n为开度序列号,所述控制点在上述特征点组成的集合中选取。
52、本发明还提供一种水泵水轮机s区特性曲线预测系统,包括:
53、模块一:其用于获取水轮机效率项、转轮流动摩擦损失项、转轮冲击损失项和尾水管旋流损失项;
54、模块二:其用于基于机组进口和出口断面之间部分的能量守恒方程和步骤1中的损失项建立控制方程;
55、模块三:其用于将模块二中的控制方程中引入修正系数获取s区特性曲线方法;
56、模块四:其用于从全特性曲线上取多组不同工况的单位转速和单位流量值作为特征点,求解未知的修正系数完成曲线预测。与现有技术相比,本发明具有如下有益效果:
57、1)本专利提出的预测方法可快速、高精度地预测水泵水轮机s区特性曲线。该模型具有减少测试试验工况点的优势,因此,可被应用于转轮模型试验,加速其试验流程。
58、2)相比于试验获取s区特性曲线的方式,本方法极大地节省了试验经费。
59、3)相比于数值模拟法获取s区特性曲线的方式,本方法解决了需要逐点仿真的问题,极大地提高了获取特性曲线的效率。
60、4)本发明专利可提供一条新的s区特性曲线获取的技术途径。
技术特征:
1.一种水泵水轮机s区特性曲线预测方法,其特征在于,包含以下步骤:
2.根据权利要求1所述的一种水泵水轮机s区特性曲线预测方法,其特征在于,所述步骤1中水轮机效率项获取方法如下:
3.根据权利要求1所述的一种水泵水轮机s区特性曲线预测方法,其特征在于,所述步骤1中转轮流动摩擦损失项获取方法如下:
4.根据权利要求1所述的一种水泵水轮机s区特性曲线预测方法,其特征在于,所述步骤1中转轮冲击损失项获取方法如下:
5.根据权利要求1所述的一种水泵水轮机s区特性曲线预测方法,其特征在于,所述步骤1中尾水管旋流损失项获取方法如下:
6.根据权利要求1所述的一种水泵水轮机s区特性曲线预测方法,其特征在于,所述步骤2中,机组进口和出口断面之间部分应用能量守恒方程为:
7.根据权利要求6所述的一种水泵水轮机s区特性曲线预测方法,其特征在于,所述步骤3中,将控制方程中左端三项各引入一项修正系数,即:
8.根据权利要求1所述的一种水泵水轮机s区特性曲线预测方法其特征在于,从相应的导叶开度上,取三个或三个以上控制点处的单位转速n11,单位流量q11分别求解s区特性曲线中求解未知的修正系数ct1,ct2和ct3,完成s区特性曲线预测。
9.根据权利要求8所述的一种水泵水轮机s区特性曲线预测方法其特征在于,以水轮机工况最优开度线为对象将开度线与q11轴交点记为a,水轮机最优点记为t,飞逸点记为r,与n11轴正方向交点记为b,所有开度线上相应特征点组成的集合分别记为an,tn,rn,bn,n为开度序列号,所述控制点在上述特征点组成的集合中选取。
10.一种水泵水轮机s区特性曲线预测系统,其特征在于,包括:
技术总结
本发明公开了一种水泵水轮机S区曲线预测方法及系统,在本技术方案中,首先,我们根据欧拉方程和能量方程推导了描述转轮S特性曲线的数学模型。随后,引入修正系数以扩大理论模型适用范围,并通过特征点对未知系数进行求解以确定该模型。预测结果显示,预测曲线与实测曲线吻合良好,具备较高的精度。本专利可应用于快速、高精度地预测水泵水轮机S区特性曲线,相比于试验或数值模拟方式获取转轮S区特性曲线的方法,本专利提供的方法节省了大量的试验经费和时间。
技术研发人员:程永光,胡赞熬,刘珂,张鹏程,薛松
受保护的技术使用者:武汉大学
技术研发日:
技术公布日:2024/1/16
- 还没有人留言评论。精彩留言会获得点赞!