优化地图拐角轨迹的方法、装置、设备及介质与流程
本发明涉及地图优化,尤其是指优化地图拐角轨迹的方法、装置、设备及介质。
背景技术:
1、现有的基于定位器的地图轨迹拐角都是线段连接形成的多边形形状,定位点连接处较为尖锐突出,受限于环境因素和传感器本身的限制,定位点存在噪点和误差,及上报定位点的时间间隔较长等原因;在地图显示轨迹时,拐角处的轨迹线较为尖锐突出,整体不够圆滑,与正常的轨迹情况不贴合,导致用户的使用体验不佳。
技术实现思路
1、本发明的目的在于克服现有技术的不足,提供优化地图拐角轨迹的方法、装置、设备及介质。
2、为了解决上述技术问题,本发明采用如下技术方案:
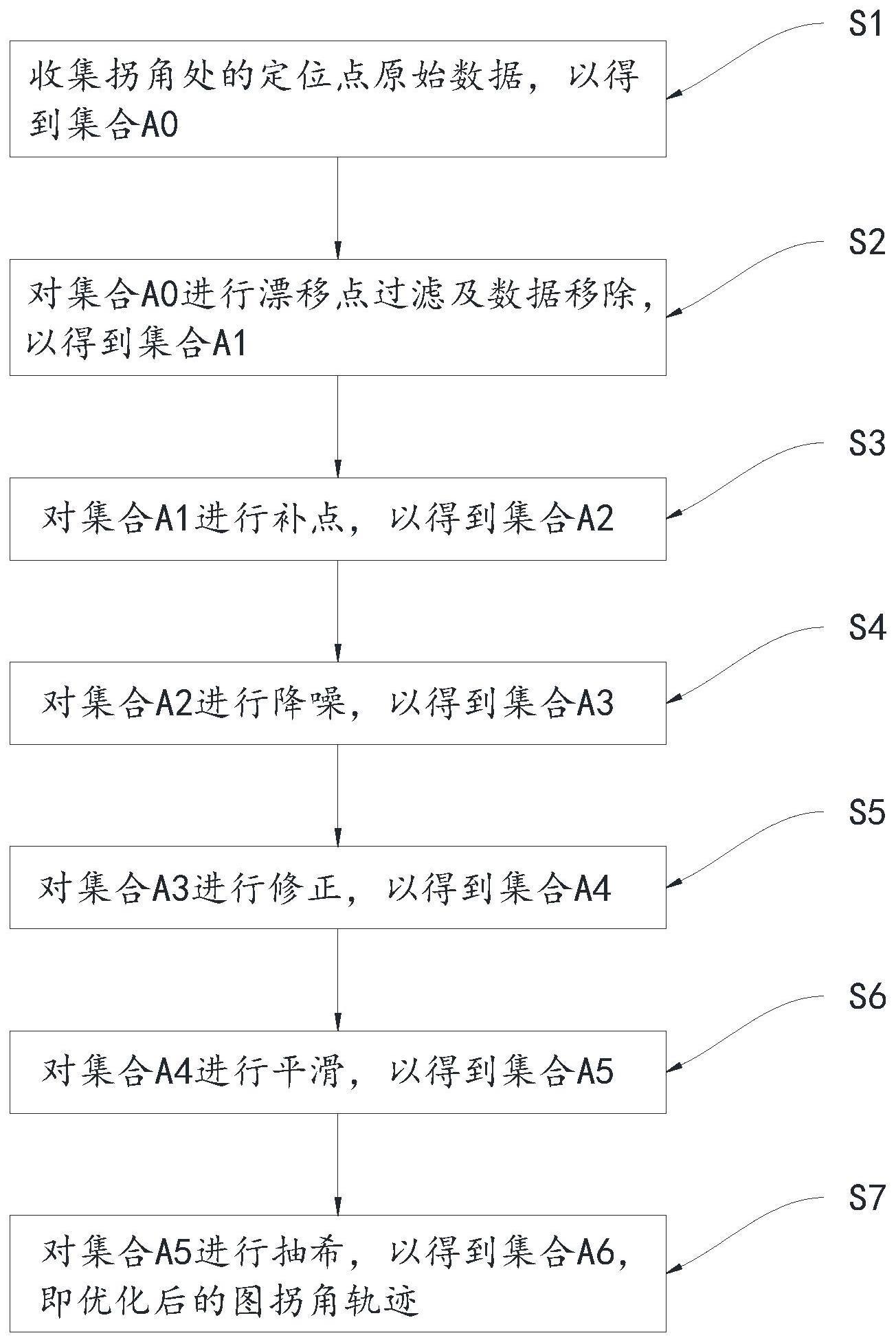
3、第一方面,本实施例提供了一种优化地图拐角轨迹的方法,包括以下步骤:
4、收集拐角处的定位点原始数据,以得到集合a0;
5、对集合a0进行漂移点过滤及数据移除,以得到集合a1;
6、对集合a1进行补点,以得到集合a2;
7、对集合a2进行降噪,以得到集合a3;
8、对集合a3进行修正,以得到集合a4;
9、对集合a4进行平滑,以得到集合a5;
10、对集合a5进行抽希,以得到集合a6,即优化后的地图拐角轨迹。
11、其进一步技术方案为:所述对集合a0进行漂移点过滤及数据移除,以得到集合a1,包括:
12、根据定位点原始数据,计算当前定位点pi和上一个定位点pi-1之间的距离d(p i-1,p i)、以及时间间隔t(pi-1,pi),并根据距离d(pi-1,pi)和时间间隔t(p i-1,p i)计算得到平均车速s(p i-1,pi);
13、结合车辆类型和行车数据,设定车速阀值st;
14、判断车速s(p i-1,p i)是否小于阀值st;
15、若车速s(p i-1,p i)小于阀值st,则该定位点符合要求;
16、若车速s(p i-1,p i)不小于阀值st,则将该定位点移除;
17、遍历集合a0中的所有定位点,将所有符合要求的定位点收集,以得到集合a1。
18、其进一步技术方案为:所述对集合a1进行补点,以得到集合a2,包括:
19、设定补充的定位点个数为n,遍历集合a1获取当前定位点pa和下一个定位点pb;
20、计算两点之间的时间间隔t(pa,pb)、距离d(pa,pb)和平均移动速度s(pa,pb);
21、根据补点数n和时间t(pa,pb),计算时间插值系数t,再由n和t计算得到补点pn的时间;
22、根据补点数n和距离d(pa,pb),计算距离插值系数d,再结合n、d及定位点pa的位置,计算得到补点pn的经纬度;
23、对集合a1进行遍历补点,以得到补点集,将补点集放入集合a1,以得到集合a2。
24、其进一步技术方案为:所述对集合a2进行降噪,以得到集合a3,包括:
25、计算当前定位点p i的上一个点pi-1和下一个点pi+1的连线l(p i-1,p i+1)到当前定位点p i的垂直距离ld(p i-1,pi,pi+1);
26、判断垂直距离ld(pi-1,pi,pi+1)是否小于等于阀值dt;
27、若垂直距离ld(p i-1,pi,pi+1)小于等于阀值dt,则该定位点符合要求;
28、若垂直距离ld(p i-1,pi,pi+1)大于阀值dt,则将该定位点丢弃;
29、遍历集合a2中的所有定位点,将所有符合要求的定位点收集,以得到集合a3。
30、其进一步技术方案为:所述对集合a3进行修正,以得到集合a4步骤中,对集合a3采用卡尔曼滤波算法修正,对噪声和误差抑制,以得到集合a4。
31、其进一步技术方案为:所述对集合a4进行平滑,以得到集合a5步骤中,对集合a4采用五点线性平滑算法进行优化,以得到集合a5。
32、其进一步技术方案为:所述对集合a5进行抽希,以得到集合a6步骤中,对集合a5采用道格拉斯-普克抽希算法进行抽希,以得到集合a6。
33、第二方面,本实施例提供了一种优化地图拐角轨迹的装置,包括:收集单元、过滤移除单元、补点单元、降噪单元、修正单元、平滑单元及抽希单元;
34、所述收集单元,用于收集拐角处的定位点原始数据,以得到集合a0;
35、所述过滤移除单元,用于对集合a0进行漂移点过滤及数据移除,以得到集合a1;
36、所述补点单元,用于对集合a1进行补点,以得到集合a2;
37、所述降噪单元,用于对集合a2进行降噪,以得到集合a3;
38、所述修正单元,用于对集合a3进行修正,以得到集合a4;
39、所述平滑单元,用于对集合a4进行平滑,以得到集合a5;
40、所述抽希单元,用于对集合a5进行抽希,以得到集合a6,即优化后的地图拐角轨迹。
41、第三方面,本实施例提供了一种计算机设备,所述计算机设备包括存储器及处理器,所述存储器上存储有计算机程序,所述处理器执行所述计算机程序时实现如上述所述的优化地图拐角轨迹的方法。
42、第四方面,本实施例提供了一种存储介质,所述存储介质存储有计算机程序,所述计算机程序包括程序指令,所述程序指令当被处理器执行时可实现如上述所述的优化地图拐角轨迹的方法。
43、本发明与现有技术相比的有益效果是:通过收集拐角处的定位点原始数据,然后对定位点原始数据进行漂移点过滤和数据移除、补点、降噪、修正、平滑、以及抽希,得到优化后的地图拐角轨迹,可以使轨迹拐角处比较圆滑,解决轨迹拐角处像多条直线拼接起来的问题,提高用户的使用体验。
44、下面结合附图和具体实施例对本发明作进一步描述。
技术特征:
1.优化地图拐角轨迹的方法,其特征在于,包括以下步骤:
2.根据权利要求1所述的优化地图拐角轨迹的方法,其特征在于,所述对集合a0进行漂移点过滤及数据移除,以得到集合a1,包括:
3.根据权利要求1所述的优化地图拐角轨迹的方法,其特征在于,所述对集合a1进行补点,以得到集合a2,包括:
4.根据权利要求1所述的优化地图拐角轨迹的方法,其特征在于,所述对集合a2进行降噪,以得到集合a3,包括:
5.根据权利要求1所述的优化地图拐角轨迹的方法,其特征在于,所述对集合a3进行修正,以得到集合a4步骤中,对集合a3采用卡尔曼滤波算法修正,对噪声和误差抑制,以得到集合a4。
6.根据权利要求1所述的优化地图拐角轨迹的方法,其特征在于,所述对集合a4进行平滑,以得到集合a5步骤中,对集合a4采用五点线性平滑算法进行优化,以得到集合a5。
7.根据权利要求1所述的优化地图拐角轨迹的方法,其特征在于,所述对集合a5进行抽希,以得到集合a6步骤中,对集合a5采用道格拉斯-普克抽希算法进行抽希,以得到集合a6。
8.优化地图拐角轨迹的装置,其特征在于,包括:收集单元、过滤移除单元、补点单元、降噪单元、修正单元、平滑单元及抽希单元;
9.一种计算机设备,其特征在于,所述计算机设备包括存储器及处理器,所述存储器上存储有计算机程序,所述处理器执行所述计算机程序时实现如权利要求1-7中任一项所述的优化地图拐角轨迹的方法。
10.一种存储介质,其特征在于,所述存储介质存储有计算机程序,所述计算机程序包括程序指令,所述程序指令当被处理器执行时可实现如权利要求1-7中任一项所述的优化地图拐角轨迹的方法。
技术总结
本发明涉及优化地图拐角轨迹的方法、装置、设备及介质,该方法,包括:收集拐角处的定位点原始数据,以得到集合A0;对集合A0进行漂移点过滤及数据移除,以得到集合A1;对集合A1进行补点,以得到集合A2;对集合A2进行降噪,以得到集合A3;对集合A3进行修正,以得到集合A4;对集合A4进行平滑,以得到集合A5;对集合A5进行抽希,以得到集合A6,即优化后的地图拐角轨迹。本发明通过收集拐角处的定位点原始数据,然后对定位点原始数据进行漂移点过滤和数据移除、补点、降噪、修正、平滑、以及抽希,得到优化后的地图拐角轨迹,可以使轨迹拐角处比较圆滑,解决轨迹拐角处像多条直线拼接起来的问题,提高用户的使用体验。
技术研发人员:林泽鑫,马少杰
受保护的技术使用者:深圳市几米物联有限公司
技术研发日:
技术公布日:2024/1/15
- 还没有人留言评论。精彩留言会获得点赞!