一种噪声条件下无监督迁移学习轴承故障诊断方法和系统
本发明涉及轴承故障诊断,具体涉及一种噪声条件下无监督迁移学习轴承故障诊断方法和系统。
背景技术:
1、迁移学习(tl)在轴承智能故障诊断(ifd)方面取得了很大进展。然而,由于工程实践中轴承工作条件恶劣,除了轴承振动信号外,传感器还不可避免地采集噪声信号,当下流行tl方法可以提高智能故障诊断(ifd)的精度,但不能保证工作条件变化,特别是在噪声环境下的优异性能。因此,亟需一种在噪声环境下仍能不依赖于任何轴承数据标签信息实现无监督故障诊断方法。
技术实现思路
1、为解决现有技术中存在的问题,本发明提供了一种噪声条件下无监督迁移学习轴承故障诊断方法和系统,通过一种自适应输入长度模型来代替固定的输入长度来诊断不同参数的轴承,结合第一卷积层和池化层的宽核信号处理方法对输入进行特征去噪;构建基于1维分组卷积和实例归一化算法,用于特征提取、健康状况分类和去噪;引入基于最大均值差异的优化目标函数对特征分布差异进行对齐;提出的模型不依赖于任何轴承数据标签信息,实现了无监督故障诊断;所提出模型不仅拥有较好智能故障诊断的性能,在噪声条件下对tl不同数据集具有优秀的轴承故障诊断能力,解决了上述背景技术中提到的问题。
2、为实现上述目的,本发明提供如下技术方案:一种噪声条件下无监督迁移学习轴承故障诊断方法,包括如下步骤:
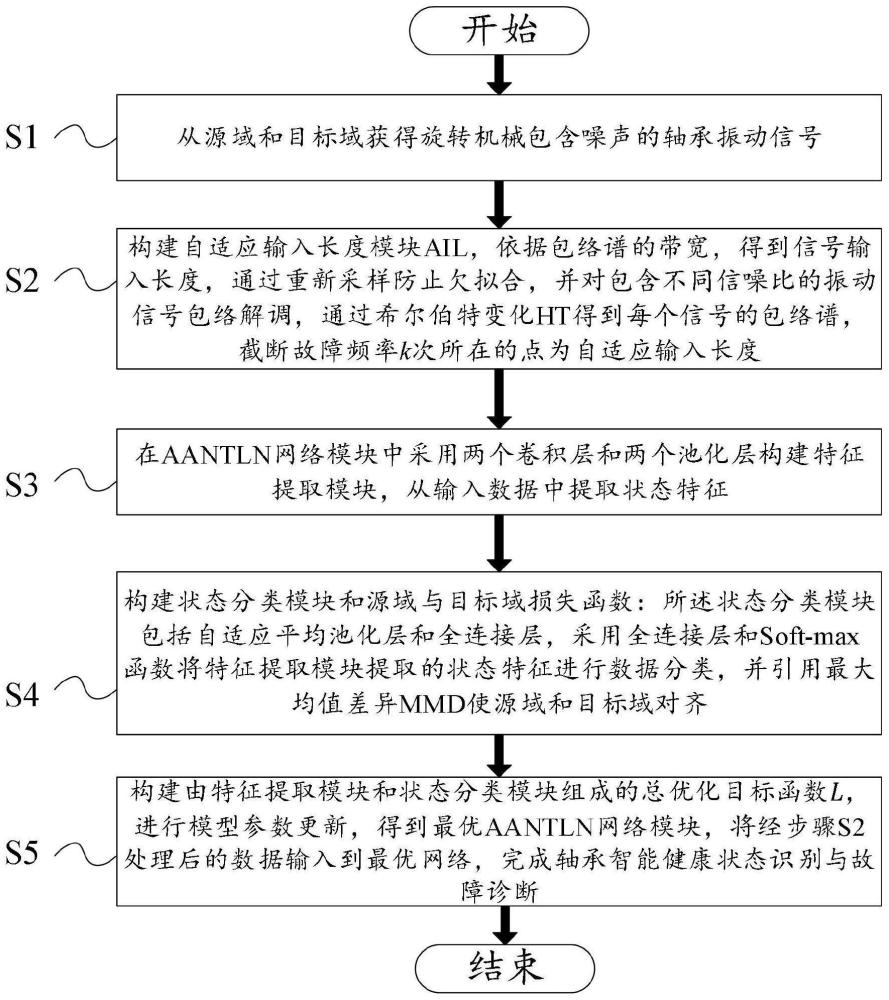
3、s1、从源域和目标域获得旋转机械包含噪声的轴承振动信号;
4、s2、构建自适应输入长度模块ail,依据包络谱的带宽,得到信号输入长度,通过重新采样防止欠拟合,并对包含不同信噪比的振动信号包络解调,通过希尔伯特变化ht得到每个信号的包络谱,截断故障频率k次所在的点为自适应输入长度;
5、s3、在aantln网络模块中采用两个卷积层和两个池化层构建特征提取模块,从输入数据中提取状态特征;
6、s4、构建状态分类模块和源域与目标域损失函数:所述状态分类模块包括自适应平均池化层和全连接层,采用全连接层和soft-max函数将特征提取模块提取的状态特征进行数据分类,并引用最大均值差异mmd使源域和目标域对齐;
7、s5、构建由特征提取模块和状态分类模块组成的总优化目标函数l,进行模型参数更新,得到最优aantln网络模块,将经步骤s2处理后的数据输入到最优网络,完成轴承智能健康状态识别与故障诊断。
8、优选的,在步骤s2中,设振动信号的包络谱前l点带宽标记为bw,则输入长度计算公式所示如下:
9、
10、其中fs是采样频率,是自适应输入长度;
11、内圈、外圈、滚子和保持架的输入长度分别计算如下:
12、
13、
14、
15、
16、fr、n、d、d、φ分别表示旋转频率、滚子数、滚子直径、节圆直径和接触角;
17、其中,k代表超参数,在计算后,选择最大值作为il,公式表达如下:
18、
19、优选的,所述不同信噪比具体是选择信噪比snr为-4db,-2db,0db,2db,4db,6db,8db和10db,信噪比的计算方法如下:
20、
21、其中psignal是信号能量,pnosie是噪声能量。
22、优选的,所述aantln网络模块包括自适应输入长度模块ail、卷积层cnn和池化层;每个卷积层中包括分组卷积层gc、实例归一化层in。
23、优选的,在步骤s4中,对于输入特征图第i层的前向传播过程可以表示为:
24、xi+1=relu(ln(gc(xj)))
25、其中relu激活函数通过以下方式获得:
26、relu(x)=max(0,x)
27、全连接层fc层计算如下:
28、
29、其中θc=[θ1,θ2,...,θk]记录故障分类器的参数。
30、优选的,所述的总优化目标函数l表示为:
31、l=lc+αlmmd+f(α)
32、lc和lmmd分别表示源域和目标域数据集的故障分类误差和域对齐误差,
33、
34、lmmd=mmd(xs,xt)
35、其中b为批量处理大小的值,其中α是lc和lmmd的权衡因子,f(α)是避免权值为0的调节项。
36、另一方面,为实现上述目的,本发明还提供了如下技术方案:一种噪声条件下无监督迁移学习轴承故障诊断系统,所述系统包括:
37、数据采集模块(110)、从源域和目标域获得旋转机械包含噪声的轴承振动信号;
38、第一构建模块(120)、构建自适应输入长度模块ail,依据包络谱的带宽,得到信号输入长度,通过重新采样防止欠拟合,并对包含不同信噪比的振动信号包络解调,通过希尔伯特变化ht得到每个信号的包络谱,截断故障频率k次所在的点为自适应输入长度;
39、第二构建模块(130)、在aantln网络模块中采用两个卷积层和两个池化层构建特征提取模块,从输入数据中提取状态特征;
40、第三构建模块(140)、构建状态分类模块和源域与目标域损失函数:所述状态分类模块包括自适应平均池化层和全连接层,采用全连接层和soft-max函数将特征提取模块提取的状态特征进行数据分类,并引用最大均值差异mmd使源域和目标域对齐;
41、故障诊断模块(150)、构建由特征提取模块和状态分类模块组成的总优化目标函数l,进行模型参数更新,得到最优aantln网络模块,将经第一构建模块处理后的数据输入到最优网络,完成轴承智能健康状态识别与故障诊断。
42、本发明的有益效果是:本发明方法不依赖于任何轴承数据标签信息,实现了无监督故障诊断;所提出模型不仅拥有较好智能故障诊断的性能,在噪声条件下对tl不同数据集具有优秀的轴承故障诊断能力。
技术特征:
1.一种噪声条件下无监督迁移学习轴承故障诊断方法,其特征在于,包括如下步骤:
2.根据权利要求1所述的噪声条件下无监督迁移学习轴承故障诊断方法,其特征在于:在步骤s2中,设振动信号的包络谱前l点带宽标记为bw,则输入长度计算公式所示如下:
3.根据权利要求2所述的噪声条件下无监督迁移学习轴承故障诊断方法,其特征在于:所述不同信噪比具体是选择信噪比snr为-4db,-2db,0db,2db,4db,6db,8db和10db,信噪比的计算方法如下:
4.根据权利要求1所述的噪声条件下无监督迁移学习轴承故障诊断方法,其特征在于:所述aantln网络模块包括自适应输入长度模块ail、卷积层cnn和池化层;每个卷积层中包括分组卷积层gc、实例归一化层in。
5.根据权利要求1所述的噪声条件下无监督迁移学习轴承故障诊断方法,其特征在于:在步骤s4中,对于输入特征图第i层的前向传播过程可以表示为:
6.根据权利要求1所述的噪声条件下无监督迁移学习轴承故障诊断方法,其特征在于:所述的总优化目标函数l表示为:
7.一种噪声条件下无监督迁移学习轴承故障诊断系统,其特征在于:所述系统包括:
技术总结
本发明公开了一种噪声条件下无监督迁移学习轴承故障诊断方法和系统,通过一种自适应输入长度模型来代替固定的输入长度来诊断不同参数的轴承,结合第一卷积层和池化层的宽核信号处理方法对输入进行特征去噪;构建基于分组卷积和实例归一化算法,用于特征提取、健康状况分类和去噪;引入基于最大均值差异的优化目标函数对特征分布差异进行对齐;提出的模型不依赖于任何轴承数据标签信息,实现了无监督故障诊断;所提出模型不仅拥有较好智能故障诊断的性能,在噪声条件下对TL不同数据集具有优秀的轴承故障诊断能力。
技术研发人员:易彩,汤贵庭,陶冶,王靖元,汪煜坤,林建辉,张维浩,李奕璠
受保护的技术使用者:西南交通大学
技术研发日:
技术公布日:2024/2/1
- 还没有人留言评论。精彩留言会获得点赞!