一种动边界多相流动中旋涡结构对应瞬态载荷的获取方法与流程
本发明属于水动力学,具体涉及一种动边界多相流动中旋涡结构对应瞬态载荷的获取方法。
背景技术:
1、非定常运动是水力机械固有的典型工作状态,其往往伴随着复杂的水动力特性及流场结构。加压泵出水口侧的缓控截止蝶阀开启/关闭时间往往长达200s,高速水流冲击非定常运动的蝶阀常常伴随着复杂多相旋涡湍流流动和水动力瞬态载荷发生,易导致压力供水系统发生事故,停泵水泵倒转,进而诱发管路水锤效应,供水工程遭受严重破坏。
2、追其本质,复杂的水动力瞬态载荷主要源于非定常运动导致的惯性力作用以及粘性力作用,且惯性力作用影响相对较小,以边界剪切层涡和动态分离涡周期性产生、发展、拓扑变形和重建为特征的粘性力作用是导致动力载荷的主要根源。获取复杂多相旋涡结构与水动力载荷之间的对应关系是深入研究动边界多相流动载荷演化机理和控制的基础,故目前亟需一种动边界多相流动中旋涡结构对应瞬态载荷的获取方法。
技术实现思路
1、(一)要解决的技术问题
2、本发明要解决的技术问题是:有鉴于现有技术瓶颈问题,如何提供一种动边界多相流动中旋涡结构对应瞬态载荷的获取方法,用于解决现有技术存在的动边界多相流动中指定旋涡结构的瞬态载荷提取困难问题,需要能够提高水动力载荷定量分析效率,并且该方法在水动力学研究过程中也有着非常广泛的应用前景。
3、(二)技术方案
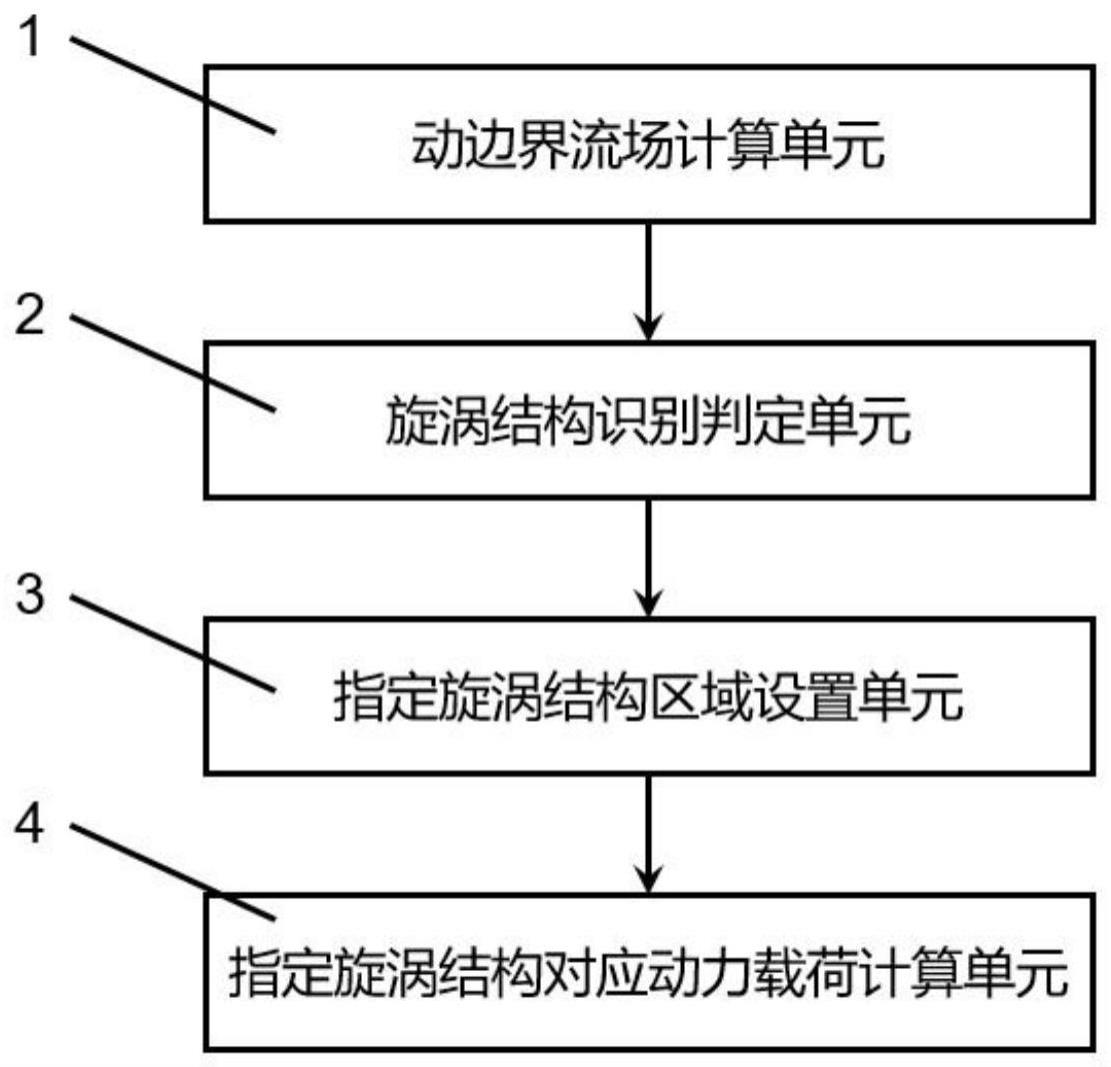
4、为解决上述技术问题,本发明提供一种动边界多相流动中旋涡结构对应瞬态载荷的获取方法,所述方法的实施涉及动边界流场计算单元、旋涡结构识别判定单元、指定旋涡结构区域设置单元、指定旋涡结构对应瞬态载荷计算单元;
5、所述方法包括如下步骤:
6、步骤1、由动边界流场计算单元计算动边界多相流动,获取流场数据;
7、步骤2、根据步骤1中所获取的流场数据,由旋涡结构识别判定单元进行流场旋涡结构识别;
8、步骤3、根据步骤2的识别结果,获得动边界多相流动中的旋涡结构分布图;根据所述旋涡结构分布图确定某个指定旋涡结构的流体区域,该流体区域包含边界坐标;
9、步骤4、根据步骤3中获取的指定旋涡结构的流体区域,根据涡动力学理论,进行指定旋涡结构对应瞬态载荷计算,并获得指定旋涡结构对应瞬态载荷。
10、其中,所述步骤4中,所述指定旋涡结构对应瞬态载荷的计算公式为:
11、f=-ρ∫v(ω×u)dv (12)
12、式中,v为旋涡结构边界组成的流体区域,ω为涡量,u为流体速度矢量,ρ为多相流体混合平均密度,f为指定旋涡结构对应瞬态载荷。
13、其中,所述步骤1中,所述动边界流场计算单元在进行动边界多相流动计算,获取流场数据的过程中,其操作环节包括网格划分、边界条件设置、湍流模型设置、多相流模型设置、收敛条件设置。
14、其中,所述步骤2中,所述旋涡结构识别判定单元进行流场旋涡结构识别的依据方法包括:欧拉识别法和拉格朗日识别法。
15、其中,所述步骤2中,所述旋涡结构识别判定单元在依据欧拉识别法进行流场旋涡结构识别的过程中,所述欧拉识别法包括:δ识别方法、q识别方法、ω识别方法。
16、其中,所述步骤2中,依据δ识别方法进行流场旋涡结构识别的原理如下:
17、所述δ识别方法的表达式为:
18、
19、
20、
21、式中,δ为旋涡结构判据准则,u为流体速度矢量;的特征值λ满足特征方程λ3-pλ2+qλ-r=0,其中p、q、r是关于的三个定值;当旋涡结构判据准则δ>0时,速度梯度张量有复数特征值,即表示存在旋涡结构。
22、其中,所述步骤2中,依据q识别方法进行流场旋涡结构识别的原理如下:
23、所述q识别方法的表达式为:
24、
25、
26、
27、式中,q为旋涡结构判据准则,ω为当地旋转速率,s为当地形变速率,i、j分别表示不同方向的序号,ui表示i方向的流体速度矢量、uj表示j方向的流体速度矢量;xi表示i方向的坐标、xj表示j方向的坐标;
28、当旋涡结构判据准则q>0,表示当地旋转速率ω大于当地形变速率s,即表示存在旋涡结构。
29、其中,所述q识别方法中,
30、在二维情况下,i、j分别表示二维平面上两个不同方向之一;
31、在多维情况下,i、j分别表示多维中两个不同纬度之一。
32、其中,所述步骤2中,依据ω识别方法进行流场旋涡结构识别的原理如下:
33、所述ω识别方法的表达式为:
34、
35、
36、a=trace(ata) (9)
37、b=trace(btb) (10)
38、
39、式中,u为流体速度矢量,ω为旋涡结构判据准则,表示涡量的平方和涡量平方与形变平方之和的比值,a为对称的形变速率张量,b为反对称的旋转角速率张量,a为形变平方,b为涡量的平方;
40、当ω>0.52时,即可判定存在旋涡结构。
41、其中,所述步骤3中,应用后处理工具来提取所述指定旋涡结构的流体区域的边界坐标;
42、所述后处理软件包括:cfx-post后处理工具、tecplot后处理工具。
43、(三)有益效果
44、与现有技术相比较,本发明应用上述步骤提取的水动力载荷信息可指导动边界多相流动的流场控制优化设计,解决动边界流动载荷稳定性等关键技术问题。另外,所得到的水动力载荷信息还能为水力机械等系统的健康监测、结构故障诊断等方面的应用提供有力的支持,具有广泛的应用前景与效益。
45、传统流体计算软件中采取的内置水动力载荷计算原理为经典的物面积分,提取数据为整体流场对应的载荷变化情况,本发明公开的一种动边界多相流动中旋涡结构对应瞬态载荷的获取方法,可针对某个指定旋涡结构进行局部定量分析,获得典型旋涡结构对水动力载荷的贡献度,有利于进一步深入分析水动力载荷理论溯源,提高设计研究效率。
技术特征:
1.一种动边界多相流动中旋涡结构对应瞬态载荷的获取方法,其特征在于,所述方法的实施涉及动边界流场计算单元、旋涡结构识别判定单元、指定旋涡结构区域设置单元、指定旋涡结构对应瞬态载荷计算单元;
2.如权利要求1所述的动边界多相流动中旋涡结构对应瞬态载荷的获取方法,其特征在于,所述步骤4中,所述指定旋涡结构对应瞬态载荷的计算公式为:
3.如权利要求1所述的动边界多相流动中旋涡结构对应瞬态载荷的获取方法,其特征在于,所述步骤1中,所述动边界流场计算单元在进行动边界多相流动计算,获取流场数据的过程中,其操作环节包括网格划分、边界条件设置、湍流模型设置、多相流模型设置、收敛条件设置。
4.如权利要求1所述的动边界多相流动中旋涡结构对应瞬态载荷的获取方法,其特征在于,所述步骤2中,所述旋涡结构识别判定单元进行流场旋涡结构识别的依据方法包括:欧拉识别法和拉格朗日识别法。
5.如权利要求4所述的动边界多相流动中旋涡结构对应瞬态载荷的获取方法,其特征在于,所述步骤2中,所述旋涡结构识别判定单元在依据欧拉识别法进行流场旋涡结构识别的过程中,所述欧拉识别法包括:δ识别方法、q识别方法、ω识别方法。
6.如权利要求5所述的动边界多相流动中旋涡结构对应瞬态载荷的获取方法,其特征在于,所述步骤2中,依据δ识别方法进行流场旋涡结构识别的原理如下:
7.如权利要求5所述的动边界多相流动中旋涡结构对应瞬态载荷的获取方法,其特征在于,所述步骤2中,依据q识别方法进行流场旋涡结构识别的原理如下:
8.如权利要求7所述的动边界多相流动中旋涡结构对应瞬态载荷的获取方法,其特征在于,所述q识别方法中,
9.如权利要求5所述的动边界多相流动中旋涡结构对应瞬态载荷的获取方法,其特征在于,所述步骤2中,依据ω识别方法进行流场旋涡结构识别的原理如下:
10.如权利要求1所述的动边界多相流动中旋涡结构对应瞬态载荷的获取方法,其特征在于,所述步骤3中,应用后处理工具来提取所述指定旋涡结构的流体区域的边界坐标;
技术总结
本发明属于水动力学技术领域,具体涉及一种动边界多相流动中旋涡结构对应瞬态载荷的获取方法,所述方法首先应用动边界流场计算单元计算动边界多相流动,获取流场数据;应用旋涡结构识别判定单元进行流场旋涡结构识别;然后根据旋涡结构分布图可确定某个指定旋涡结构区域边界,应用后处理软件可提取指定旋涡结构区域边界坐标;最后进行指定旋涡结构对应瞬态载荷计算。本发明可实现对某个指定旋涡结构的局部定量分析,获得典型旋涡结构对水动力载荷的贡献度,有利于进一步深入分析水动力载荷理论溯源,提高设计研究效率。
技术研发人员:张孟杰,康忠,何靖仪,王美靖
受保护的技术使用者:中国北方车辆研究所
技术研发日:
技术公布日:2024/1/15
- 还没有人留言评论。精彩留言会获得点赞!