一种基于注意力机制特征融合的航拍车辆检测方法
本发明涉及车辆检测,更具体的说是涉及一种基于注意力机制特征融合的航拍车辆检测方法。
背景技术:
1、随着经济的快速发展,机动车已经成为出行的主要交通工具之一。然而,机动车的快速增长也带来了一系列的问题和挑战,如交通拥堵、环境污染、交通事故和安全隐患等。这些问题和挑战对交通管理、智能驾驶和安全防范等领域提出了更高的要求和期待。为了解决这些问题和挑战,需要对车辆目标进行高效、准确、鲁棒的检测和定位,实现对车辆的监控、识别、跟踪和分析。
2、传统的车辆检测方法主要基于地面摄像头或卫星影像作为数据源。可以实时地获取路面上的图像或视频信息,并进行车辆目标的检测和定位。地面摄像头具有成本低、部署方便、响应快等优点,但也存在一些局限性,如视角受限、分辨率低、覆盖范围小、受天气影响等。卫星影像是另一种常见的车辆检测手段之一,它可以从高空对地面目标进行拍摄或测量,并进行车辆目标的检测和定位。卫星影像具有视角广、分辨率高、覆盖范围大等优点,但也存在一些局限性,如成本高、更新慢、受云层影响等。无人机航拍是指利用无人机搭载摄像头或其他传感器,对地面或空中目标进行拍摄或测量的技术。无人机航拍具有机动灵活、高效快速、精细准确、成本低廉、适用范围广等特点,在军事、民用、科研等领域有着广泛的应用和发展前景。无人机航拍相比传统的航空摄影测量手段,具有更高的分辨率、更低的成本、更灵活的作业方式、更快的响应速度等优势,在小区域和飞行困难地区高分辨率影像快速获取方面具有明显优势。
3、但是,目前,基于无人机航拍的车辆检测技术还处于探索和发展阶段,面临着一些挑战和难题,如背景复杂、目标小、相机运动、遮挡等。这些问题导致无人机航拍影像中的车辆目标难以被有效地识别和定位,影响了车辆检测的性能和适应性。
4、因此,如何提出一种基于注意力机制特征融合的航拍车辆检测方法,解决传统车辆检测方法在视角受限、分辨率低、覆盖范围小、受天气影响等方面的局限性,提高车辆检测的性能和适应性是本领域技术人员亟需解决的问题。
技术实现思路
1、有鉴于此,本发明提供了一种基于注意力机制特征融合的航拍车辆检测方法,解决传统车辆检测方法在视角受限、分辨率低、覆盖范围小、受天气影响等方面的局限性,提高车辆检测的性能和适应性,为了实现上述目的,本发明采用如下技术方案:
2、一种基于注意力机制特征融合的航拍车辆检测方法,包括:
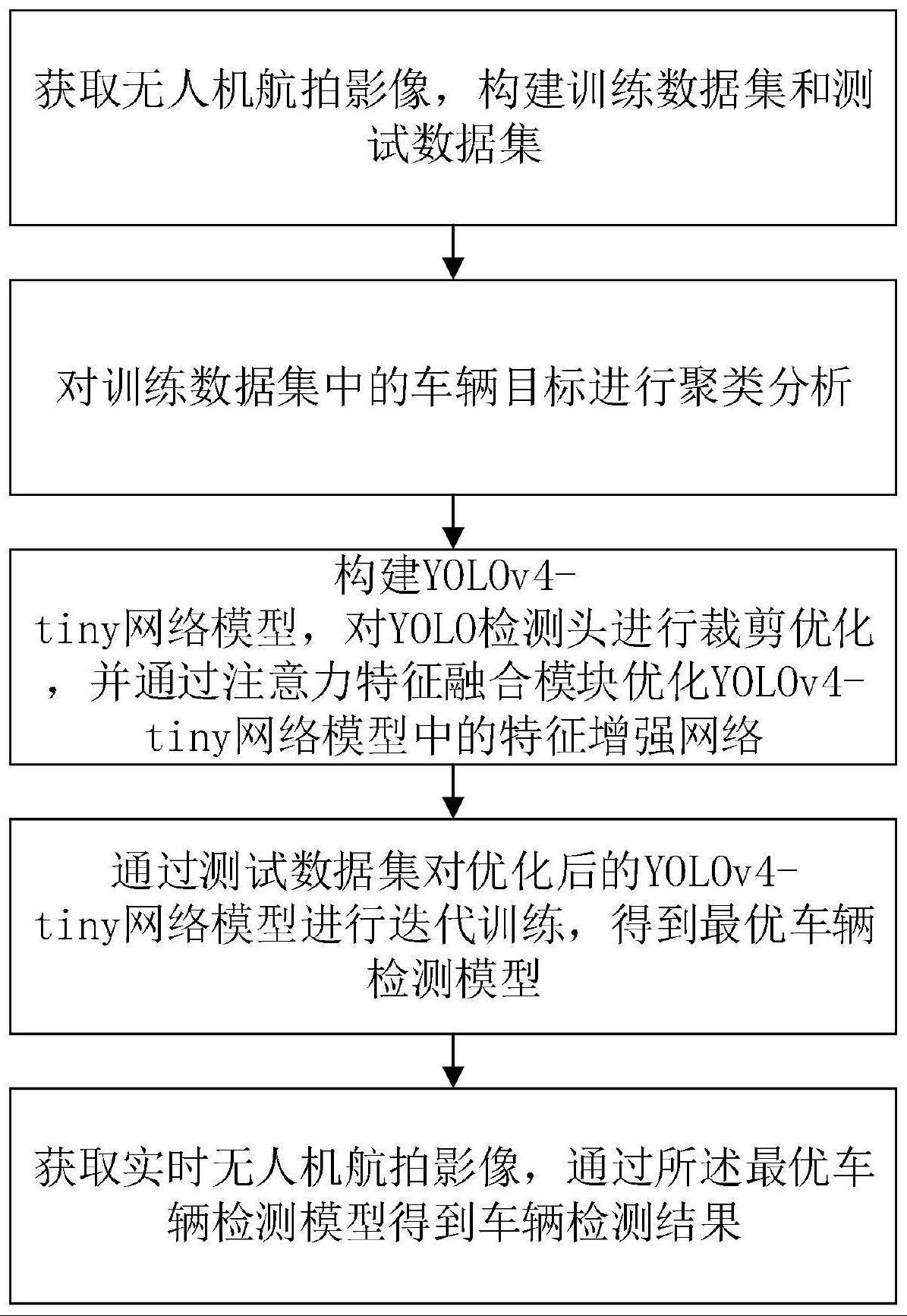
3、获取无人机航拍影像,构建训练数据集和测试数据集;
4、对训练数据集中的车辆目标进行聚类分析;
5、构建yolov4-tiny网络模型,对yolo检测头进行裁剪优化,并通过注意力特征融合模块优化yolov4-tiny网络模型中的特征增强网络;
6、通过测试数据集对优化后的yolov4-tiny网络模型进行迭代训练,得到最优车辆检测模型;
7、获取实时无人机航拍影像,通过所述最优车辆检测模型得到车辆检测结果。
8、可选的,所述无人机航拍影像包括dronevehicle航拍车辆数据集和对比航拍车辆数据集,所述dronevehicle航拍车辆数据集和所述对比航拍车辆数据集中的图像尺寸、质量和车辆目标占比程度不同。所述对比航拍车辆数据集中的车辆大小更小,检测难度更大,更适合验证算法的鲁棒性。
9、可选的,所述无人机航拍影像为rgb图像,所述训练数据集和测试数据集的比例为2:1。
10、可选的,所述对训练数据集中的车辆目标进行聚类分析包括:通过改进k-means++算法对训练数据集中车辆目标的真实边界框进行聚类,得到航拍车辆检测的最优锚框数量和尺寸。所述基于k-means++聚类算法的锚框优化方案,可以有效地找出适合航拍车辆检测的锚框的大小,提高车辆检测的精确性和召回率。利用k-means++聚类算法,对训练数据集中的车辆目标进行聚类分析,得到最优的锚框数量和尺寸,实现对车辆目标的精确定位。
11、可选的,所述改进k-means++算法包括:
12、s1:从训练数据集中随机选择一个样本的真实边界框作为第一个聚类中心;
13、s2:对于每个样本x,计算其与已有聚类中心c的距离d(x),选择距离最近的一个作为下一个聚类中心;
14、s3:重复步骤s2,直到选出k个聚类中心;
15、s4:使用k-means算法进行聚类,得到最终的锚框大小。
16、可选的,所述距离d(x)的计算公式为:
17、其中,x为样本,xi为第i个样本。
18、可选的,所述yolov4-tiny网络模型包括cspdarknet53-tiny主干网络、fpn特征增强网络和yolo检测头,所述cspdarknet53-tiny主干网络、fpn特征增强网络和yolo检测头依次连接。
19、可选的,所述对yolo检测头进行裁剪优化包括:在原有yolov4-tiny网络结构中,从cspdarknet53-tiny主干网络中第三个resblock_body层中最后一个conv2d_bn_leaky层引出一个浅层特征层,作为有效特征层输入到特征增强网络中,在浅层特征层上添加一个用于小目标检测的yolo检测头;并将yolo检测头结构中由深层次特征图分支引出的yolo检测头删除,只保留浅层和中层分支。
20、可选的,所述通过注意力特征融合模块优化yolov4-tiny网络模型中的特征增强网络包括:用注意力特征融合模块代替yolov4-tiny中fpn特征增强网络的concat层。
21、可选的,所述注意力特征融合模块的输入特征x,y的通道和尺寸一致,所述输入特征x为经过pwconv变换到跟输入特征y相同通道数的特征,所述输入特征y为经过conv2d_upsample变换到跟输入特征x相同尺寸的特征。
22、经由上述的技术方案可知,与现有技术相比,本发明公开提供了一种基于注意力机制特征融合的航拍车辆检测方法,具有如下有益效果:
23、本发明提出了一种基于yolov4-tiny改进的网络模型,针对车辆目标较小的特点,可以有效地提取无人机航拍影像中车辆目标特征,提高对车辆检测的精度和鲁棒性。提出了一种基于k-mens++聚类算法的锚框优化方案,可以有效地找出适合航拍车辆检测的锚框的大小,提高车辆检测的精确性和召回率。制作了一个对比航拍车辆数据集,该数据集中的车辆图像大小更小,检测难度更大,更适合验证方案的鲁棒性。提出了一种基于注意力机制特征融合的航拍车辆检测方法,可以有效地筛选和加权不同层次和通道的特征图,提高车辆检测的准确性。与现有的无人机航拍车辆检测方法相比,本发明在检测速度、平均精度、平均召回率和map等指标上均有显著提升。
技术特征:
1.一种基于注意力机制特征融合的航拍车辆检测方法,其特征在于,包括:
2.根据权利要求1所述的一种基于注意力机制特征融合的航拍车辆检测方法,其特征在于,所述无人机航拍影像包括dronevehicle航拍车辆数据集和对比航拍车辆数据集,所述dronevehicle航拍车辆数据集和所述对比航拍车辆数据集中的图像尺寸、质量和车辆目标占比程度不同。
3.根据权利要求1所述的一种基于注意力机制特征融合的航拍车辆检测方法,其特征在于,所述无人机航拍影像为rgb图像,所述训练数据集和测试数据集的比例为2:1。
4.根据权利要求1所述的一种基于注意力机制特征融合的航拍车辆检测方法,其特征在于,所述对训练数据集中的车辆目标进行聚类分析包括:通过改进k-means++算法对训练数据集中车辆目标的真实边界框进行聚类,得到航拍车辆检测的最优锚框数量和尺寸。
5.根据权利要求4所述的一种基于注意力机制特征融合的航拍车辆检测方法,其特征在于,所述改进k-means++算法包括:
6.根据权利要求1所述的一种基于注意力机制特征融合的航拍车辆检测方法,其特征在于,距离d(x)的计算公式为:
7.根据权利要求1所述的一种基于注意力机制特征融合的航拍车辆检测方法,其特征在于,所述yolov4-tiny网络模型包括cspdarknet53-tiny主干网络、fpn特征增强网络和yolo检测头,所述cspdarknet53-tiny主干网络、fpn特征增强网络和yolo检测头依次连接。
8.根据权利要求1所述的一种基于注意力机制特征融合的航拍车辆检测方法,其特征在于,所述对yolo检测头进行裁剪优化包括:在原有yolov4-tiny网络结构中,从cspdarknet53-tiny主干网络中第三个resblock_body层中最后一个conv2d_bn_leaky层引出一个浅层特征层,作为有效特征层输入到特征增强网络中,在浅层特征层上添加一个用于小目标检测的yolo检测头;并将yolo检测头结构中由深层次特征图分支引出的yolo检测头删除,只保留浅层和中层分支。
9.根据权利要求1所述的一种基于注意力机制特征融合的航拍车辆检测方法,其特征在于,所述通过注意力特征融合模块优化yolov4-tiny网络模型中的特征增强网络包括:用注意力特征融合模块代替yolov4-tiny中fpn特征增强网络的concat层。
10.根据权利要求9所述的一种基于注意力机制特征融合的航拍车辆检测方法,其特征在于,所述注意力特征融合模块的输入特征x,y的通道和尺寸一致,所述输入特征x为经过pwconv变换到跟输入特征y相同通道数的特征,所述输入特征y为经过conv2d_upsample变换到跟输入特征x相同尺寸的特征。
技术总结
本发明公开了一种基于注意力机制特征融合的航拍车辆检测方法,涉及车辆检测技术领域,包括:获取无人机航拍影像,构建训练数据集和测试数据集;对训练数据集中的车辆目标进行聚类分析;构建网络模型并对网络模型进行车辆目标检测优化;通过测试数据集对优化后的网络模型进行迭代训练,得到最优车辆检测模型;获取实时无人机航拍影像,通过最优车辆检测模型得到车辆检测结果。本发明针对车辆目标较小的特点,提取无人机航拍影像中车辆目标特征,提高对车辆检测的精度和鲁棒性;找出适合航拍车辆检测的锚框的大小,提高车辆检测的精确性和召回率;筛选和加权不同层次和通道的特征图,提高车辆检测的准确性。
技术研发人员:沈家全,张永新,孟庆超,李德光,赵正伟,张之敏,张世界,孙鹏,张继永,范雨辰,冯尚
受保护的技术使用者:洛阳师范学院
技术研发日:
技术公布日:2024/1/15
- 还没有人留言评论。精彩留言会获得点赞!