一种复杂系统动力学行为建模方法、系统及设备
本发明涉及复杂系统建模领域,特别是涉及一种复杂系统动力学行为建模方法、系统及设备。
背景技术:
1、复杂系统在现实世界中大量存在,如社会系统、生物系统、神经系统、生态系统等,为了深入理解这些系统,并进行分析与调控,建模是最关键一步,然而,为复杂系统建立精准的数学模型非常困难。这些系统呈现出主体数量多、属性多,主体间关联交互复杂,主体演化影响因素多、不确定性强,演化环境未知且具有时空特征等特性。这对复杂系统建模提出了更高要求:模型应具有更高的自适应性,在较少的先验知识下给出精准、可信的预测。为了建模主体之间多模态、多关系、异质的复杂网络,将非线性内嵌规律和演化行为建模为节点上的动力学方程,方程主体采用符号表示,为后续使用非线性方法对系统自组织和涌现等行为进行分析做好铺垫。
2、符号回归(symbolic regression)是一种监督学习方法,利用特征变量与目标变量发现未知形式的符号表达式,作为一种白盒模型,兼具精确性与可解释性,确保得到的模型能以人类可以理解的方式解释数据的底层结构和交互关系,在特征选择、时间序列预测、系统建模等领域广泛应用,因此将符号回归用于复杂系统建模的动力学方程学习,建模主体间的演化、交互行为。
3、符号回归问题目前主要的解决方法可以分为三种:遗传编程,基于深度神经网络的模型和基于强化学习的模型。而目前的符号回归方法存在输入特征数量少、训练成本高等缺陷,面对底层动力学机制未知、表达式过长或表现出高度嵌套结构等问题时方程恢复率较低。因此需要针对上述问题设计新的符号回归模型架构,能够提高方程的恢复效率,并能够将算法应用到复杂系统的real-world场景数据集上,如行人动力学系统,以验证模型在复杂系统动力学行为建模方面的可用性、泛化性。
技术实现思路
1、本发明的目的是提供一种复杂系统动力学行为建模方法、系统及设备,能够提高复杂系统建模领域使用白盒符号回归方法时的方程恢复效率、模型可用性以及泛化性。
2、为实现上述目的,本发明提供了如下方案:
3、一种复杂系统动力学行为建模方法,包括:
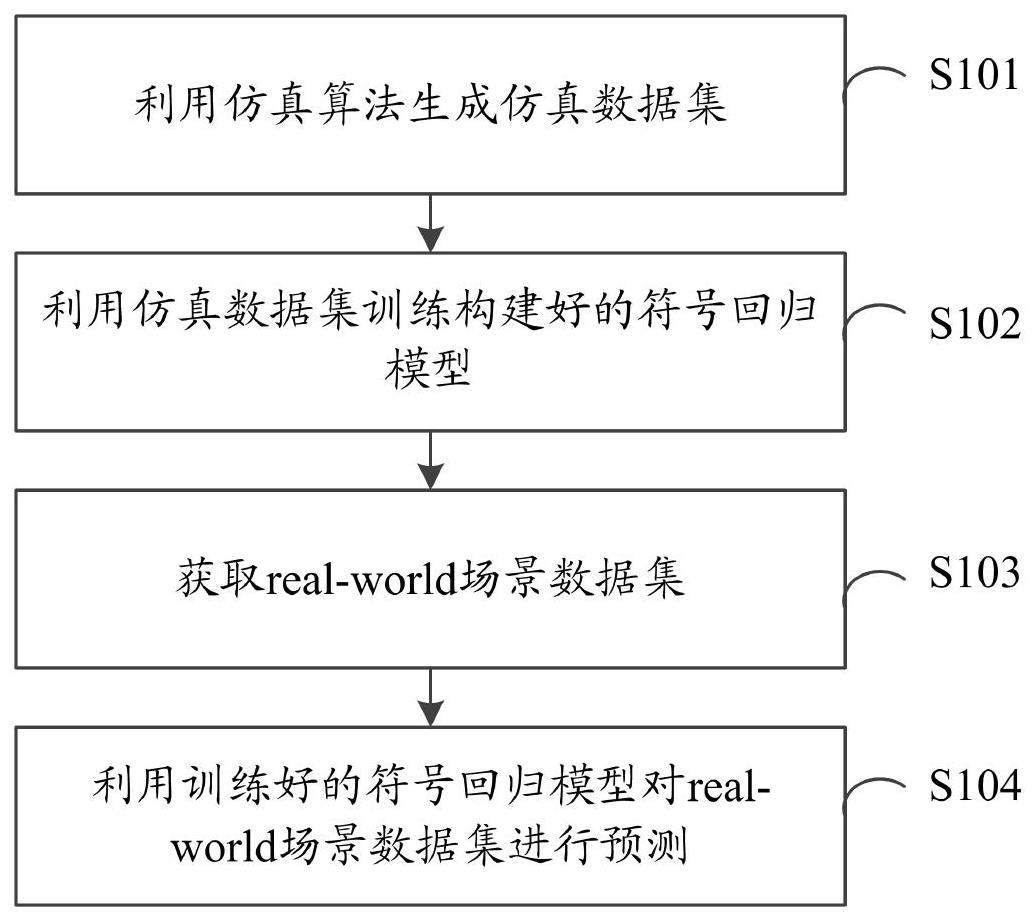
4、利用仿真算法生成仿真数据集;所述仿真数据集为输入矩阵的集合;
5、利用仿真数据集训练构建好的符号回归模型;所述符号回归模型包括:预训练transformer模块、蒙特卡洛树搜索模块以及遗传编程模块;所述预训练transformer模块包括:编码器和解码器;所述编码器以输入矩阵和形式先验为输入,以隐向量为输出;所述解码器引入硬约束,并以自回归的形式将隐向量解码为方程骨架;所述蒙特卡洛树搜索模块用于根据输入矩阵进行搜索,得到粗粒度基函数库;所述遗传编程模块用于以方程骨架为初始种群,以预先设置的细粒度基函数库和粗粒度基函数库分层进行,迭代演化,得到最优的方程表达式;
6、获取real-world场景数据集;
7、利用训练好的符号回归模型对real-world场景数据集进行预测。
8、可选地,所述形式先验的引用形式包括:随机截取或mask方程表达式的后续遍历序列以及方程以树的形式随机产生从根节点到叶子节点的随机游走序列。
9、可选地,所述形式先验分为:全部已知、部分已知、全部未知以及部分错误。
10、可选地,所述编码器具体包括:局部特征提取模块、全局特征提取模块以及隐向量编码模块;
11、局部特征提取模块包括:两个级联的lbr层、两个sg层、两层全连接层以及最大池化层;lbr层包括:linear层线性变换、batchenorm层归一化和relu层激活;
12、输入矩阵通过两个级联的lbr层,得到变换后的矩阵;变换后的矩阵通过sg层,采用最远点采样算法和邻域嵌入法,得到特征差值;特征差值与对应的样本点的特征连接后输入至两层全连接层,得到特征;特征通过最大池化层,得到局部特征;
13、全局特征提取模块用于将输入矩阵的特征采用自注意力块变换,得到变换后的特征;并将变换后的特征经线性变换得到特征矩阵,并采用偏移注意力结构,得到全局特征;
14、隐向量编码模块用于将局部特征和全局特征编码为隐向量。
15、一种复杂系统动力学行为建模系统,包括:
16、仿真数据集生成模块,用于利用仿真算法生成仿真数据集;所述仿真数据集为输入矩阵的集合;
17、符号回归模型训练模块,用于利用仿真数据集训练构建好的符号回归模型;所述符号回归模型包括:预训练transformer模块、蒙特卡洛树搜索模块以及遗传编程模块;所述预训练transformer模块包括:编码器和解码器;所述编码器以输入矩阵和形式先验为输入,以隐向量为输出;所述解码器引入硬约束,并以自回归的形式将隐向量解码为方程骨架;所述蒙特卡洛树搜索模块用于根据输入矩阵进行搜索,得到粗粒度基函数库;所述遗传编程模块用于以方程骨架为初始种群,以预先设置的细粒度基函数库和粗粒度基函数库分层进行,迭代演化,得到最优的方程表达式;
18、场景数据集获取模块,用于获取real-world场景数据集;
19、预测模块,用于利用训练好的符号回归模型对real-world场景数据集进行预测。
20、一种电子设备,包括存储器及处理器,所述存储器用于存储计算机程序,所述处理器运行所述计算机程序以使所述电子设备执行所述的一种复杂系统动力学行为建模方法。
21、可选地,所述存储器为计算机可读存储介质。
22、根据本发明提供的具体实施例,本发明公开了以下技术效果:
23、本发明所提供的一种复杂系统动力学行为建模方法、系统及设备,利用预训练transformer模块中结合输入矩阵和形式先验的编码器进行编码得到隐向量,在解码器引入硬约束,并以自回归的形式将隐向量解码为方程骨架,即预训练transformer模块中引入形式先验与约束条件提高恢复效率,剪枝搜索空间;最后将方程骨架作为初始种群,利用双适应度-分层演化的遗传编程对初始种群分别使用细粒度基函数库和粗粒度基函数库分层进化,演化出与目标方程形式最接近、误差最小的方程表达式;之后,利用训练好的符号回归模型对real-world场景数据集进行预测。本发明结合先验知识与约束,提高方程的恢复效率。此外,将训练好的符号回归模型应用到复杂系统的real-world场景数据集上,如行人动力学系统,以验证模型在复杂系统动力学行为建模方面的可用性、泛化性。
技术特征:
1.一种复杂系统动力学行为建模方法,其特征在于,包括:
2.根据权利要求1所述的一种复杂系统动力学行为建模方法,其特征在于,所述形式先验的引用形式包括:随机截取或mask方程表达式的后续遍历序列以及方程以树的形式随机产生从根节点到叶子节点的随机游走序列。
3.根据权利要求1所述的一种复杂系统动力学行为建模方法,其特征在于,所述形式先验分为:全部已知、部分已知、全部未知以及部分错误。
4.根据权利要求1所述的一种复杂系统动力学行为建模方法,其特征在于,所述编码器具体包括:局部特征提取模块、全局特征提取模块以及隐向量编码模块;
5.一种复杂系统动力学行为建模系统,其特征在于,包括:
6.一种电子设备,其特征在于,包括存储器及处理器,所述存储器用于存储计算机程序,所述处理器运行所述计算机程序以使所述电子设备执行根据权利要求1至4中任一项所述的一种复杂系统动力学行为建模方法。
7.根据权利要求6所述的一种电子设备,其特征在于,所述存储器为计算机可读存储介质。
技术总结
本发明公开一种复杂系统动力学行为建模方法、系统及设备,涉及复杂系统建模领域,该方法包括利用仿真算法生成仿真数据集;所述仿真数据集为输入矩阵的集合;利用仿真数据集训练构建好的符号回归模型;所述符号回归模型包括:预训练Transformer模块、蒙特卡洛树搜索模块以及遗传编程模块;获取real‑world场景数据集;利用训练好的符号回归模型对real‑world场景数据集进行预测。本发明能够提高复杂系统建模领域使用白盒符号回归方法时的方程恢复效率、模型可用性以及泛化性。
技术研发人员:吴春国,张雨翔,杨博,郭灏洋
受保护的技术使用者:吉林大学
技术研发日:
技术公布日:2024/1/15
- 还没有人留言评论。精彩留言会获得点赞!